

无人机自主智能控制的关系及其实现的工程方法与方案
描述
分析研究了无人机的本质与内涵,系统阐述了无人机自主与智能控制的内涵与本质以及二者的关系,提出了无人机自主控制的设计理念和工程实施要素,合理规划了自主智能控制的等级,提出了无人机自主智能控制实现的工程方法与方案,构建了自主智能控制系统工程实现的架构。
1 引言
从古老的传说或寓言故事中可知,人类自诞生起,就梦想着能够像鸟一样飞行,人类通过一代一代幻想、努力、前赴后继地探索如何能够自由地在天空中飞翔,人类尝试了多种方法,如: 使用风筝、早期的火箭、飞车、热气球以及滑翔机,但都没能实现自由飞行。
到了1903年,莱特兄弟用自己设计的“飞行机器—飞机”完成了人类第一次动力载人飞行,实现了人类在空中飞行的梦想。在人类梦想在天空中飞翔的同时,人们也开始设想人不在飞机上,在地面上控制 飞机的飞行,这就产生了无人机的概念,1916年美国的斯佩里(Sperry)和劳伦斯(Lawrence)进行了首次无人机飞行,自此开启了人类对无人机的研究先河, 经过第一次世界和第二次世界大战,特别是经过冷战时期,无人机得到了长足的发展;无人机经过100年的发展,形成了庞大的家族体系,分支众多,可以从机身结构、体积重量、飞行高度、航程、航时、用途等多个维度对其进行分类,如从机身结构特征进行分类, 可分为无人直升机、无人固定翼飞机、无人多旋翼飞行器、无人飞艇、无人伞翼机和扑翼无人机等;从体积重量特性来分类,可分为大型无人机、中型无人机、小型无人机和微型无人机;按用途可分为军用无人机(情报、侦察、监视、诱饵、电子对抗、通信中继、靶机和无人战斗机等)、民用无人机(如警用、消防、气象)和消费级无人机(航拍、游戏等休闲用途);还可分为高空无人机、长航时无人机、远程无人机、高空长航时无人机等。
世界上任何事物的发展都是与时俱进的,其实质内涵与外表特征都在不断地演变进化,无人机也是如此,对无人机的定义与内涵也需不断地动态完善,无 人机从简单的人遥控飞机飞行时代发展到现在的无人机自动(自主)飞行阶段,也应适应技术的发展和人们认识的提高而有较明确的定义,否则对无人机技术的发展不利,甚至阻碍无人机技术的发展。本文就无人机的发展变迁进行了研究分析,归纳 了无人机的内涵和定义及其发展,阐述了无人机控制的内涵,探讨了自主与智能二者之间的相互关系,给出了自主智能控制设计理念和工程要素,提出了无人机自主智能控制实现方法与方案。
2 无人机的定义与内涵
1916年9月12日, 美国的斯佩里(Sperry)和劳伦斯 (Lawrence)的“休伊特-斯佩里自动飞机(Hewitt-Sperry AutomaticAirplane)”完成人类第一次有动力无人飞行,人类便开启了无人机研究的新纪元,人们在最初定义无人机时,采用的是最直观的物理概念,只考虑了飞行员与飞机的物理位置关系,即:飞机上没有飞行员的飞机则称为无人机,起初在英语中用pilotlessaircraft表达,这也是无人机最基本的内涵。
随着无线电遥控技术的发展,航空工程师使用了无线电在地面遥控无人机的飞行,这就出现了遥控飞行器(Remotely Piloted Aerial Vehicle, RPAV)和遥控飞 行系统(Remotely Piloted Aircraft System, RPAS)术语,在此期间也有人使用UninhabitedAerialVehicle作为无人机的名称术语。
Unmanned Aircraft System (UAS)在《无人机路 线图2005~2030》被美国国防部和FAA所采用[1],并给出了定义:指不载有操作人员、利用空气动力提供升力、可以自主飞行或遥控驾驶、可以一次使用也可回收使用、携带致命或非致命有效载荷的有动力飞行器。此定义明确了无人机的最基本内涵:1) 飞机上无驾驶人员;2) 能完成一定的使命任务;3) 能够重复使用。
依据上面的定义,弹道或半弹道飞行器、巡航导弹和炮弹不能看作是无人飞行器,原因是导弹不能回 收;目前遥控航空模型飞机是否属于无人机仍有疑义和争论,未有定论,主要原因是现代航空模型飞机也采用了先进的控制技术,其功用也在变化,从司法层面和飞行管理层面上无法明确鉴定。笔者认为:如果只是在视距内进行表演娱乐活动, 遥控航空模型飞机可认为不属于无人机,
无人机发展到现在,在技术上使用Unmanned Aerial Vehicle (UAV)来代表无人机,而在民间中,则经常使用drone(老式军用无人机发动机有规则的噪声与公蜂的蜂鸣相似的原因)来代表无人机[1,2]。
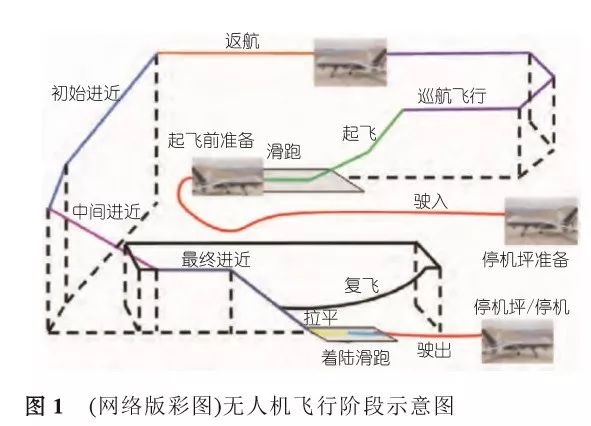
无人机的两种形式表达:unmannedaerialvehicle和uninhabitedaerialvehicle仔细探究其含义是有区别的,unmanned从字面上有两个含义: 其一是直接的含义,无人的,飞机上无人;其二是无人操纵的;而uninhabited只有飞机上无人的含义。从unmanned字面上讲,无人 机应同时具备两个含义, 即: 人不在飞机上并且人不操控飞机, 飞机能够“正常”飞行,也就是说无人机从起飞准备-滑行-起飞-空中飞行-返场着陆-退出关停的全过程(图1)都可不需要人介入。因此,用“unmanned aerialvehicle”来定义无人机是最合适的,更能体现“真” 无人机的内涵。无人作战飞机(UCAV)的英文表达应为: unmanned combat aerial vehicle。
无人机经过100年的发展,其演变与发展是全方位的,其内涵也发生了重大变化,无论执行的任务千变万化,但其最根本的变化还是其飞行控制方式的变 化,按照无人机飞行控制方式的变化,无人机经历了 下面几个发展阶段,并形成了相应种类的无人机:
(1) 遥控飞行无人机(阶段);
(2) 遥控加局域自动飞行无人机(阶段);
(3) 全自动飞行无人机(阶段);
(4) 全自动加局域自主飞行无人机(阶段);
(5) 全自主飞行无人机阶段(下一阶段,即将来临)。
目前,国际上无人机的最高水平是全自动加局域自主飞行无人机,根据不同的任务需求以及人力和成本的情况,依据实际情况来选择无人机的种类,这几 类无人机可以并存,相互补充,充分发挥每一种无人 机的优势。
技术发展到现阶段,从狭义上定义,无人机的飞 行可与人没有直接关系,即: 人与无人机二者存在隔离的状态;从广义上讲,由于无人机作为一类可飞行的工具或武器,人要使用它,就必须明确“人机权限”问题:人是无人机的主人(主宰),无人机的行为要听从人的管控,但人的自身能力、精力以及精确控制飞机能力的限制,不可能分分秒秒或时时刻刻管控无人 机,因此无人机必须要有独立自主(自动)工作的能力。
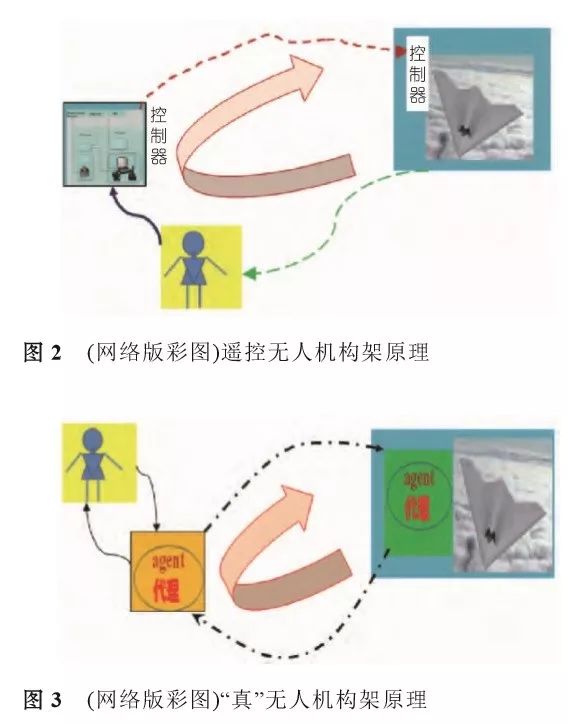
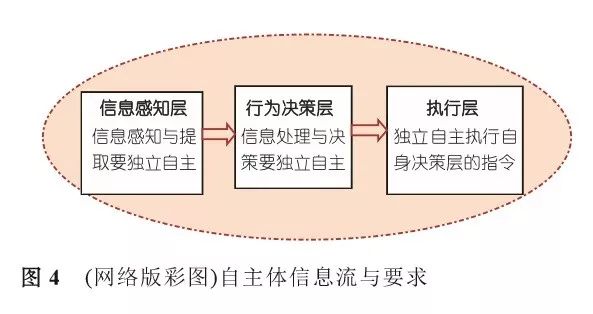
从上面的分析中可知,遥控飞行无人机(remotely piloted vehicle)与“真”无人机(unmanned aerial vehicle) 其内涵和本质是有区别的。遥控飞行的无人机的构架原理图见图2,“真”无人机的构架原理图见图3。从图2和3可直观看到二者的不同,遥控飞行无人机是在人直接控制下工作的,即人在其工作环中;而无 人机是在人授权下工作的,人在其工作环之外,而不是在工作环之中,这一本质上的差别就导致了二者在设计中系统结构、控制功能和实现方法的不同。
无论怎样给无人机下定义, 有自我独立工作能力应是其本质属性, 但不变的原则是: 无人机由人使用,人是无人机的“主人”,无人机必须听从人的管控,无人机自我独立工作权限自然是由人随时进行设置的,显而易见,为实现无人机的功用,无人机的结构与能力是在“制造”它时构造的。
因此,标准的无人机应有3 个工作模态:自主(自动)模态、人工干预模态和人工 操纵模态。这3种模态的使用是由人(操作员)设置与选择的。人(操作员)选择模态也应综合考虑实际环境的 复杂情况, 可遵循“将在外, 君命有所不受”的原则进 行模态选择. 上面的3个工作模式的定义与含义如下:
(1) 自主 (自动)模态是无人机系统的默认模式,此模式按照人制定的规则、理念、思路进行工作,管控无人机的飞 行;
(2) 人工干预模态是在自主(自动)模态下,人主动 纠正自主(自动)飞行的偏差,是在默认控制基础上增 加一△增量;
(3) 人工操纵模态是在控制系统出现故障而无法自主(自动)控制无人机应急条件下,由人直接操纵飞机。一般情况下,人工操纵难以保证飞机的控制效果,其原因很简单:人不在飞行现场,难以准确感知飞机的运动信息,因而也就难以准确控制飞机,无人机采用上述3个工作模态事实上也明确了“人 机权限”问题,人作为无人机的“主人”,人通过制定规则和策略管控无人机,无人机按规则和策略自主(自动)生成控制指令控制飞机的飞行;飞行中出现与人的设想不一致结果时,人可进行适度的修正;飞行出现应急情况时,人可直接操控飞机,这是“孤注一掷”的行为。
由于无人机在整个使用过程中,不同的飞行阶段有不同的使命和任务,因此,三种工作模态在不同的飞行阶段执行不同任务命令,基于此原因,在构造无人机系统工作逻辑结构时,应采用“因地制宜”的原则进行飞行阶段与3种工作模态的逻辑构造置,即:先确认阶段,然后再选择工作模态。采用上述模态也是涉及到无人机操控人员的日常培训理念问题,按上面模态的设置,无人机日常的训练方式应该是:以模拟器虚拟训练为主,重点在任 务方面的训练,飞行特情训练为辅,再辅以少量的实 物飞行训练的方式。
需要强调的是:既然无人机能够自主(自动)飞行,就涉及到如何自主(自动)飞行?飞行的好与坏?即自主(自动)飞行的能力和水平,也就是其智能的高低,这 就出现了自主与智能的内涵与相互关系问题。
3、自主/智能的本质内涵及其相互关系
自主/智能的本质内涵及其相互关系准则是无人 机设计的基本原则。
从一般意义上讲,自主与智能是两个不同范畴的概念,自主表达的是行为方式,由自身决策完成某行为则称为“自主”;智能则是完成行为过程的能力[3],也就是运用的方式方法以及策略是否符合自然规律或符合人(或某团体)的行为规则,在千变万化的环境中找到合理的“路径”完成某项任务,则称为是智能的。显 而易见,智能是分层次和等级的[3]。
自主与智能二者之间的关系应该是:自主在前,智能在后,二者应该相辅相成;自主未必智能,但自主希望有智能;智能依赖自主,智能的等级取决于自主权的高低,智能是自主与知识及其知识运用的结合体,智能生成的一般过程应该是:在自主的前提下, 综合运用权限范围、主动性、爱好痴迷精神、感悟力… 等各方面能力,去感受信息、提取信息、积累知识、 总结知识、归纳特征并精化、提升完善知识结构、融会贯通知识以尽可能达到符合自然规律的目的。
智能具有相对性,不同“个体”的智能是有差别的,这些差别既来自其“出生”时所赋予的智能,又来自后天学习与完善所得到的智能。由于自然界及其存在的事物都是矛盾的统一体,“正确”与“错误”、“好”与 “坏”、“聪明”与“愚蠢”等等都是相对,可以互相转化。
因此要正确理解、掌握和运用“智能”,应该认识到:在人类社会中,“高智能”是以人的标准或世界观确定的,存在所谓的“高智能”与自然界的真“高智能”不一 致的现象,也存在“大智若愚”的现象,这是人的认识能力问题。这也是人类社会的“奥妙”之一,这也引申出中华民族的至理名言“智者千虑,必有一失”这句名言既是真理,又是公理,因此在设计个体智能策略时,必须利用对方的“失”,才能掌控对方、取胜对方,因此难点就是如何探知对方的“失”,一旦掌握了对方的“失”,制定策略取胜对方就易如反掌了。
需要强调,人们往往把智力和智能混为一谈,这是错误的。智力(智商)与智能的内涵是完全不同的。智力是对知识获取、推理和运用知识的能力,而智能是指从获取的知识、知识推理和知识运用的结果符合自然规律的程度,智力只是智能形成的一个要素,有智力不一定是智能的,高智能一定是需要高智力。
在构造无人机时,应赋予无人机“相当”的自主和智能能力,以满足人的需求,应基于上述的自主与智能的关系准则进行设计。
由于无人机是在人授权下工作的,无人机由人赋予智能的能力,在赋予智能能力过程中会“植入”使无人机会出现“灾祸”的因子,所谓“灾祸”是“天灾”和“人祸”,“天灾”是自然界的创造,人类无能力管控,“人祸” 是人主观想干某事,由于能力问题或责任心问题(疏 忽),导致飞机不听人的指挥或未按人的想法“做事”,出现人不想看到、更不想要、而人又无法控制的事情发生,这确实存在,强调的是:这些失控是暂时的,不可能永远持续;原因是无人机需要能量,其智能程度是有限的,再则人也可以采用其他手段管控或击毁它,“机器将来局部取代人”的论断在某种意义上是成 立的,但“机器将来控制人类”是不可能的,但会给人 类带来“麻烦”或“灾难”,此类“麻烦”或“灾难”并不是完全不好,对于某些人群是“坏事”,但对于另外的人群是“好事”(前提是能管控住),用此特点对付“他人”。
具体个体的自主是有权限和范围的,受到许多因素的限制,正如与人的自主概念是一样的,一是人受到自然界的规律或法理限制,二是人受到所处群体的 制约(国家/制度、社会团体/规程、单位/条例、家庭/伦理道德);无人机的自主权限首先受人(使用者)限制,同时也受自身能力的制约,也受其使用环境的限 制(自然地理环境、飞机编队要求、任务要求等)。
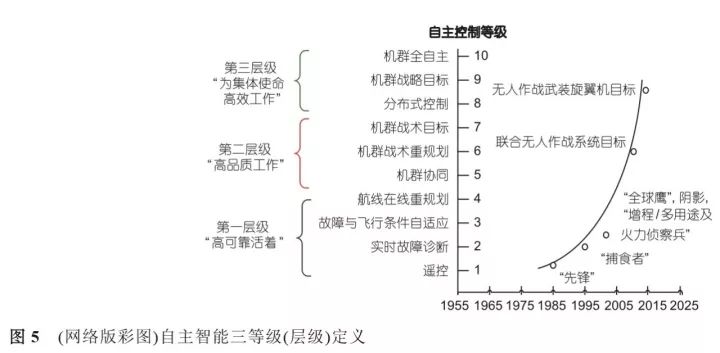
实现无人机自主行为方式的基本原则或底线是:必须具有独立自主信息获取能力、独立自主信息处理与决策能力、独立行为执行能力。独立自主信息获取能力是自主的基础,没有独立自主的信息获取能力,就是“空中楼阁”,就是个“附庸”或“寄生虫”;对无人机而言,如果信息需要外界提供,一旦外界不再提供信息,那么无人机就会变成“聋子、瞎子”;独立自主信息处理与决策能力是自主的核心,否则就谈不上自主,自己没有主见,只听别人发号施令,只能作“傀儡”;独立行为执行能力含义为独立服从自身决策层的命令,依据自身的能力去执行任务,而不是仅仅机械地执行外来命令。因此,无人机成为完整的自主智能需要有上面的三层组成,三者是相互作用与依存,是命运共同 体,图4示出了无人机自主智能体信息流图和要求示。
无人机智能实现的基本原则或底线是: 在自主体三层面的每个层面都要有基本的智能功能和能力,三者协调互补;每层的智能功能应实现基本的自然规律或行为规则,有自学习和自完善的能力。信息感知与提取要独立自主能力体现在下面三个方面:(1) 信息源应是自然属性,信息源不能人为设置特征属性,这会难以保证信息的唯一性、可信性和 安全性;(2) 信息源的信息感知要自主完成,不能利用其他外部信息和辅助段;(3) 信息特征的提取要自主完成,不能利用其他外部手段提供的特征信息。
显而易见,GPS、北斗信息以及数据链提供的信息不是自主信息,这些信息传感器(或设备)就不是自主信息传感器(或设备);下面列出的传感器(或设备) 属于信息自主感知传感器:惯性传感器; 视觉感知设备;地形匹配感知设备;光学感知(激光/红外/紫外等) 传感器;天文信息感知传感器;电磁感知传感器。
以机场感知与特征提取为例说明信息感知与提取要独立自主能力的含义。
在机场上安装反光镜或其他人为设置的标志来指示机场的位置特征、跑道的参数特征就不体现自主特性,因为这些人为设置的特征很容易改变或破坏,不能作为可信和唯一的信息属性标志。应以跑道周围难以改变的属性特征作为信息源,周围面积大小根据距离的远近选择,从远到近,区域面积逐步减小,区 域内以人难以改变的属性特征为信息提取特征:如高山、河流、自然景观以及它们之间的相互关系为属 性,这样就既能实现自主,又能进行故障识别与故障 重构,为自主决策提供可信和唯一特征的信息。
目前人是自然界的“精灵”,是最为合理的自主智能综合体。无人机的设计理念应遵循人体结构和人思维/行为逻辑的关系,复杂性管理的策略和方针应是 “分而治之”(divideandrule)[4]。人的智能处理是分层次的,对外界的信息处理和响应分优先级,生死问题优先处理,提高和改善生活质量和环境次之,不同的条件下,生死问题处理方法也不一样。因此, 无人机作为人使用的工具,其智能处理也应分层次和等级[1,5],有优先级。建议以优先级为原则将无人机智能等级分3个等级(层级)(图5)。
第一等级是无人机个体安全飞行等级,定义为“高可靠活着”:能够安全飞行,高度、速度和姿态等状态是安全的;有防撞能力,能自主安全的规避静止和动的物体;空中加受油能力,确保有飞行能量;故障重构和自修复能力;特情安全着陆能力。
第二等级是完成小组特定的工作,定义为“高品质的工作”:能够实现四维导航,实现态势感知与认知;能够实现路径规划与重规划;任务规划与重规划;无意识信息的认知。
第三等级是实现机群协同任务,定义为“为集体使命高效工作”:编队飞行;有人/无人协同作战;群体感知与态势共享;集群联合作战。
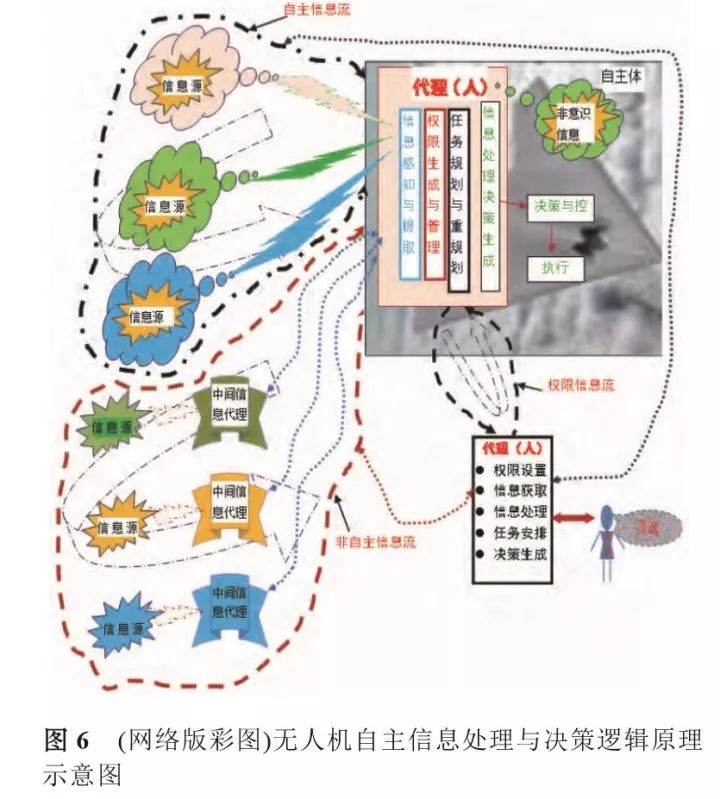
总之,为能实现上面3个等级的自主智能控制,“创造”出完整与完善的无人机, 应遵循下面的“创造”原则:在保证自主与智能的前提下,应借助其他手段和传感器充分获取和利用一切可用的信息,这样可起到事半功倍的效果和作用,强调自主与智能必需确保底线。为实现这一原则,无人机必需具有3个信息环:自主信息环、非自主(外来辅助)信息环、权限信息环(高智能还应有无意识信息环);信息的获取、处理与应用以及任务决策必须保证自主完成,这需要构造“代理机构”来实现,至少有两个“代理”,一是在地面上的“代理”, 完成人的指令构造与分发,二是在飞机上的“代理”,实现完善的自主智能管控,其作用最为关键,是核心功能“构件”,没有此“代理”,无人机就无法实现真正的自主智能使命。图6示出了无人机信息流与结构。
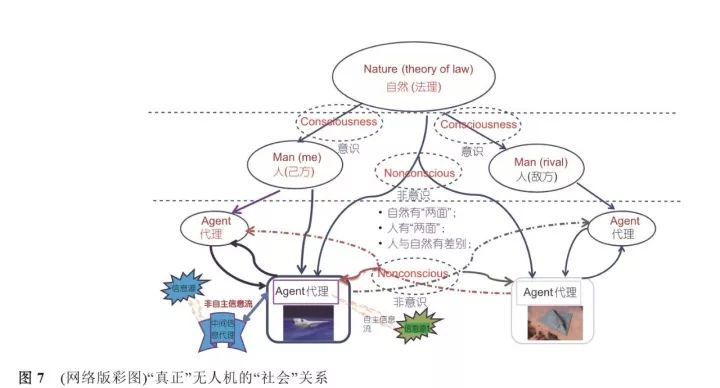
无人机在自然界能作为一完整独立的个体,它应融入自然界中,它应与自然界、作为其主人的人和对手有密切的关联,否则难以达到自主智能的高境界,无人机本体与自然和人以及代理同时有关系才能实现“真正”的自主与智能功能。图7示出了“真正”无人 机的“社会”关系。
4、无人机自主智能控制实现方法
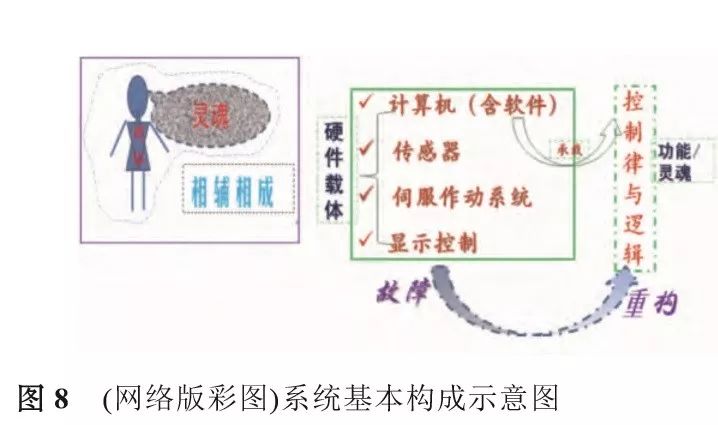
正如人一样,世界上任何有“生命”的事物构成都是一样的,由载体(人为肉体)和功能灵魂两部分组成的,因此,无人机自主智能控制系统也不例外,是由硬 件载体和载体所承载的功能灵魂(信息获取与行为决策、控制律与控制逻辑等)组成(见图8系统基本构成)。需要指出的是:硬件载体和功能灵魂是相互作用的,不同的载体承载不同的功能灵魂,高智能的灵魂需要高性能的载体,两者是相辅相成的,“创造”无人机自主智能控制系统时必须对二者同时考虑,二者必须相 协调。
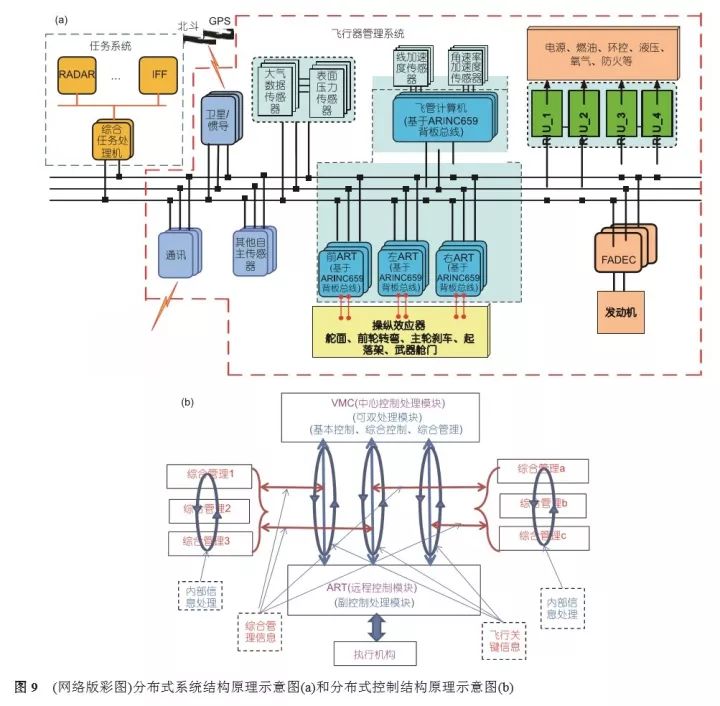
为能实现无人机自主智能控制,需要载体能扩充、功能能扩展、智能水平可提升、故障重构和自修复能力可完善,系统结构应采用分布式系统,信息感知与获取的传感器(部件)、信息处理分析与决策计算单元、指令执行部件采用相对独立,并分布式配置,这里分布式配置有两个含义,其一是硬件载体分布配置(图9(a)),二是功能控制也是分布的,有主控制中心,也有副控制中心,还有辅助控制(图9(b))[4,6]。相对来说,分布式载体构成与实现容易些,但对于自主智能的功能灵魂,要实现3层10级的自主智能等级要求,其逻辑与信息架构的“创造”难度是非常之大,经分析研究,可行的逻辑与信息架构如图10所示的四环结构,第一、第二个环完成第一层级的自主智能控制,实现“高可靠活着”;第一、第二和第三个环完成第二层级的自主智能控制,实现“高品质的工作”; 第一、二、三、四环完成第三层级的自主智能控制。
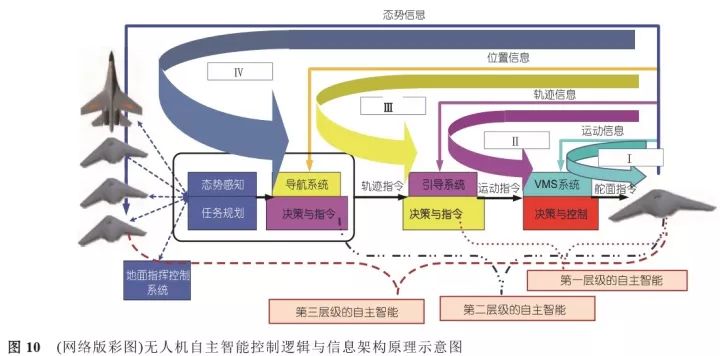
实现“为集体使命高效工作”。上面的自主智能控制的框架结构基于“分而治之”的策略,先分层次,然后每个层级采用不同智能决策策略,简化系统的复杂度。
5 、讨论与结论
本文作者在多年的研究基础上,对无人机的定义和内涵进行重新梳理,分析阐述了无人机的自主与智能控制的关系,初步形成了无人机自主智能控制实现 的基本理念和思路,构建了自主智能控制系统工程实现的架构,部分结果已在实际飞机控制系统中采用,这只是起步工作;虽然自主智能控制已有多年的研究历史,但研究深度远远不够,大多停留在理论层面上,工程应用层面上还处于萌芽状态,急需对具体的自主智能的信息感知方法、智能决策策略与实现方法(算法)进行深入研究。
-
使用 Betaflight 和树莓派实现 FPV 无人机自主飞行!2025-06-07 5896
-
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域2024-03-12 4677
-
无人机反制设备的原理是什么?2022-09-13 11767
-
【疯壳·无人机教程2】开源编队无人机-硬件资源简介2022-08-19 7671
-
四轴无人机设计2021-07-19 2094
-
航模/无人机遥控的解决方案2020-07-03 3482
-
如何使用北斗进行农用无人机的自主导航方法研究2019-05-13 2411
-
无人机的时代离我们还有多远?2019-03-15 2533
-
Ameya360 无人机视觉、高级传感与处理解决方案2018-04-23 3961
-
都在谈论无人机:教你10种利用无人机赚钱的方法2017-02-17 11679
-
【ELF灵翼自拍无人机申请】灵翼航拍无人机测评2016-04-19 2917
-
【云智易申请】智能无人机通信2015-08-07 2958
-
无人机开发方案要领与电路图集锦2015-05-07 10522
-
小型无人机数据链与自主飞控系统设计2009-06-04 1390
全部0条评论

快来发表一下你的评论吧 !
