

风力摆是什么_风力摆的机械结构
嵌入式设计应用
描述
风力摆系统是一种利用风力作为动力对物体进行位置控制的摆动装置控制系统。
在我国虽然目前还没有系统的成品的销售与应用,但这种控制理论已经应用于方方面面。目前的普遍问题是风力摆系统的自动控制水平不高。
风力摆系统由单片机控制模块、姿态采集模块、风力摆模块、显示模块、独立按键以及风力摆机械结构组成的。本文将简单介绍一下风力摆的机械结构以及风机的选择及组合方式。
风机组合
1、使用两个直流风机:直接将两个直流风机固定在摆杆的下方,两个直流风机成十字交叉状如下图所示。这种方式的优点在于负载轻、操作简单,可以直接由两个直流风机分别负责两个轴上的摆动,不过风力摆的状态微调和快速制动不易实现。
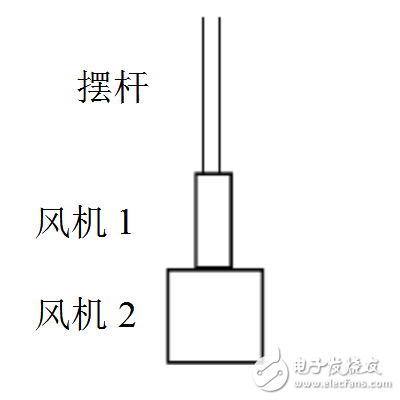
2、使用四个直流风机:用两个矩形塑料板组成十字形,分别将四个直流风机放置在四个点上如下图所示。每个轴上由两个直流风机控制风力摆的摆动,可以很好地做到加速摆动与快速制动,能够更容易的实现题目的要求。

综上所述,因为四个直流风机的组合更容易摆动与快速制动,所以选择方案2。
风机选择
本系统的风机选用空心杯电动机。
空心杯电动机属于直流永磁的伺服、控制电动机,也可以将其归类为微特电机。空心杯电动机具有突出的节能特性、灵敏方便的控制特性和稳定的运行特性,技术先进性十分明显。作为高效率的能量转换装置,在很多领域代表了电动机的发展方向。空心杯电动机在结构上突破了传统电机的转子结构形式,采用的是无铁芯转子,也叫杯型转子。这种新颖的转子结构彻底消除了由于铁芯形成涡流而造成的电能损耗,同时其重量和转动惯量大幅降低,从而减少了转子自身的机械能损耗。由于转子的结构变化而使电动机的运转特性得到了极大改善,不但具有突出的节能特点,更为重要的是具备了铁芯电动机所无法达到的控制和拖动特性。
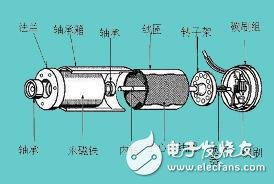
空心杯电动机结构图
1、节能特性能量转换效率很高,其最大效率一般在70%以上,部分产品可达到90%以上(铁芯电动机一股在30-50%)。
2、控制特性起动、制动迅速,响应极快,机械时间常数小于28毫秒,部分产品可以达到1毫秒以内(普通电动机一般在100一200毫秒)在推荐运行区域内的高速运转状态下,可以对转速进行灵敏的调节。
3、拖动特性运行稳定性十分可靠,转速的波动很小,能够容易的控制在2%以内。 另外,空心杯电动机的能量密度大幅度提高,与同等功率的铁芯电动机相比,其重量、体积减轻1/3~1/2.由于空心杯电动机克服了铁芯电动机不可逾越的技术障碍,而且其突出的特点集中在电动机的主要性能方面,使其具备了广阔的应用领域。
电源供电

电机驱动电路
1、使用单电源供电:这一电源将电能分别发送给电机部分和核心控制板部分,操作简单。话说回来,空心杯电机转动会给回路带来波动,如果产生回流会给主电路造成致命伤害。
2、使用双电源:空心杯电路和主控电路分隔开,这两部分的电分着发送,而且空心杯和驱动部分利用光耦。空心杯使用18V~3.3V可控电源模块供电,主控制核心电路控制系统用另一个电源供电。此方案可确保系统的稳定性,且满足了系统对供电需求。
综合上述比较,考虑系统的安全性、稳定性,本系统采用方案2。
机械结构

综上所述本系统最终的外部结构是采用三角梁结构,万向节固定在其顶部伸出的臂杆上,自由摆杆选取碳杆为材料,与万向节嵌套在一起,自由摆的状态是垂直向下。在自由摆杆的下方十字形摆放4台风机。其中1、3号直流风机用来调节垂直于运动方向上的距离,使其摆动时偏差不超过允许范围;2、4号直流风机同时运转,但转速不同,使风力摆向风速小的方向运动。风力摆无法直接运动到指定位置,所以需要多次摆动,每次到达最高点时将其推向另一侧,最终使其实现摆动。摆杆选取碳杆是因为碳杆的强度较大,质量较轻,这样可以大大减小风力摆的负担,便于快速,陀螺仪平放在轴流风机的上方,很好地监测风力摆运动状态。同时把激光笔安装在自由摆下方垂直向下。
- 相关推荐
- 热点推荐
- 风力摆
-
电赛风力摆jf_96653824 2022-01-25
-
电赛-风力摆控制系统2021-11-21 1001
-
风力摆控制系统2021-09-13 1465
-
风力摆pid调节_风力摆控制系统_风力摆系统结构图解2017-12-04 17088
-
瑞萨公司的风力摆的介绍2017-09-25 1006
-
风力摆PWM部分的程序2017-07-13 2725
-
风力摆2017-04-24 3746
-
风力摆结构搭架问题2017-03-04 3479
-
风力摆源代码2016-04-15 950
-
风力驱动的自由摆控制系统2014-03-22 8442
全部0条评论

快来发表一下你的评论吧 !
