

can总线和lin总线的区别与联系?
接口/总线/驱动
描述
一、CAN总线
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。
CAN总线的优势:
CAN属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。较之许多RS-485基于R线构建的分布式控制系统而言,基于CAN总线的分布式控制系统在以下方面具有明显的优越性:
网络各节点之间的数据通信实时性强
首先,CAN控制器工作于多种方式,网络中的各节点都可根据总线访问优先权(取决于报文标识符)采用无损结构的逐位仲裁的方式竞争向总线发送数据,且CAN协议废除了站地址编码,而代之以对通信数据进行编码,这可使不同的节点同时接收到相同的数据,这些特点使得CAN总线构成的网络各节点之间的数据通信实时性强,并且容易构成冗余结构,提高系统的可靠性和系统的灵活性。而利用RS-485只能构成主从式结构系统,通信方式也只能以主站轮询的方式进行,系统的实时性、可靠性较差;
开发周期短
CAN总线通过CAN收发器接口芯片82C250的两个输出端CANH和CANL与物理总线相连,而CANH端的状态只能是高电平或悬浮状态,CANL端只能是低电平或悬浮状态。这就保证不会在出现在RS-485网络中的现象,即当系统有错误,出现多节点同时向总线发送数据时,导致总线呈现短路,从而损坏某些节点的现象。而且CAN节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不受影响,从而保证不会出现像在网络中,因个别节点出现问题,使得总线处于“死锁”状态。而且,CAN具有的完善的通信协议可由CAN控制器芯片及其接口芯片来实现,从而大大降低系统开发难度,缩短了开发周期,这些是仅有电气协议的RS-485所无法比拟的。
已形成国际标准的现场总线
另外,与其它现场总线比较而言,CAN总线是具有通信速率高、容易实现、且性价比高等诸多特点的一种已形成国际标准的现场总线。这些也是CAN总线应用于众多领域,具有强劲的市场竞争力的重要原因。
最有前途的现场总线之一
CAN 即控制器局域网络,属于工业现场总线的范畴。与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。由于其良好的性能及独特的设计,CAN总线越来越受到人们的重视。
CAN总线特点:
(1) 数据通信没有主从之分,任意一个节点可以向任何其他(一个或多个)节点发起数据通信,靠各个节点信息优先级先后顺序来决定通信次序,高优先级节点信息在134μs通信;
(2) 多个节点同时发起通信时,优先级低的避让优先级高的,不会对通信线路造成拥塞;
(3) 通信距离最远可达10KM(速率低于5Kbps)速率可达到1Mbps(通信距离小于40M);
(4) CAN总线传输介质可以是双绞线,同轴电缆。CAN总线适用于大数据量短距离通信或者长距离小数据量,实时性要求比较高,多主多从或者各个节点平等的现场中使用。
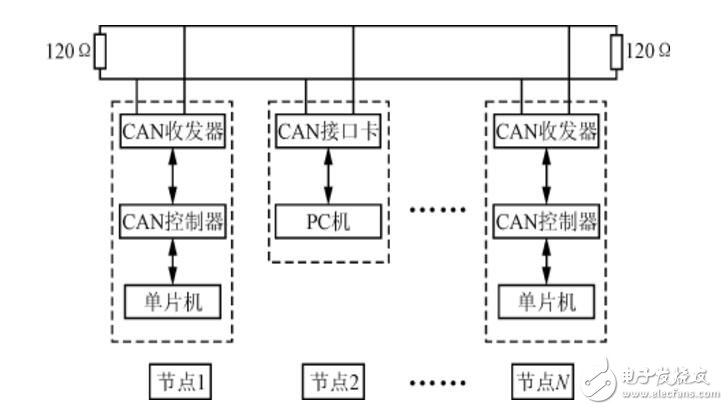
CAN总线节点的硬件构成方案有两种:
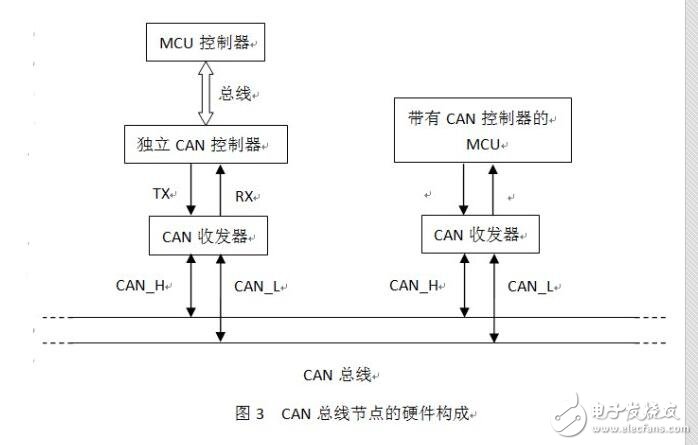
(1)、MCU控制器+独立CAN控制器+CAN收发器。独立CAN控制器如SJA10000、MCP2515,其中MCP2515通过SPI总线和MCU连接,SJA1000通过数据总线和MCU连接。
(2)、带有CAN控制器的MCU+CAN收发器。目前,市场上带有CAN控制器的MCU有许多种,如P87C591、LPC2294、C8051F340等。
两种方案的节点构成都需要通过CAN收发器同CAN总线相连,常用的CAN收发器有PCA82C250、PCA82C251、TJA1050、TJA1040等。
两种方案的节点构成各有利弊:
第一种方案编写的CAN程序是针对独立CAN控制器的,程序可移植性好,编写好的程序可以方便的移植到任意的MCU。但是,由于采用了独立的CAN控制器,占用了MCU的I/O资源,并且电路变得复杂。
第二种方案编写的CAN程序是针对特定选用的MCU,例如LPC2294。程序编写好后,不可以移植。但是,MCU控制器中集成了CAN控制器单元,硬件电路变得简单些。
二、LIN总线
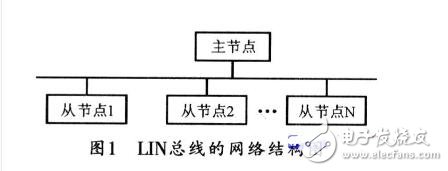
LIN总线是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。LIN总线是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,是UART中的一种特殊情况。
LIN总线特点:
低成本:基于通用UART 接口几乎所有微控制器都具备LIN 必需的硬件;
极少的信号线即可实现国际标准ISO9141 规定;
传输速率最高可达20Kbit/s;
单主控器/多从设备模式无需仲裁机制;
从节点不需晶振或陶瓷震荡器就能实现自同步,节省了从设备的硬件成本;保证信号传输的延迟时间;
不需要改变LIN 从节点的硬件和软件就可以在网络上增加节点;
通常一个LIN 网络上节点数目小于12 个共有64 个标志符;
LIN总线应用:
典型的LIN 总线应用是汽车中的联合装配单元,如:门、方向盘、座椅、空调、照明灯、湿度传感器,交流发电机等。对于这些成本比较敏感的单元,LIN 可以使那些机械元件如智能传感器、制动器或光敏器件得到较广泛的使用。这些元件可以很容易的连接到汽车网络中并得到十分方便的维护和服务。在LIN 实现的系统中通常将模拟信号量用数字信号量所替换,这将使总线性能优化。
三、CAN总线和LIN总线的区别联系
信号线及信号对比
CAN总线以CAN一High和CAN一历w两条信号线 (双绞线)工作,舒适CAN总线 两条线的电平分别约为OV和5V(隐性时)。LIN总线只以一条相当于CAN一忱如的信号线工作,隐性时电平接近电瓶电压,并随 之浮动;显性时电平接近地电平。使用0·35mmz导线,颜色为紫底白线。
组件对比
CAN总线工作时,电子单元中除了需要相对复杂的收发器外,“通常还需要用专门的协 议控制器。LIN总线单元中的收发器较简单,而且由于协议简单,通常不需要专门的协议 控制器。
传输速率对比
CAN总线的位速率较高,在汽车中使用时通常为5OOkb/s,最低的也达到1OOkb/s。 LIN总线的最高位速率为2Okb/s,通常使用1920Ob/s或9600b/s的速率。
系统结构对比
CAN总线为多主机系统,即接人总线的任一电子单元都可通过总线仲裁来获取总线控 制权,并向总线系统中发送信息,单元在发出完整的ID时即为主机。CAN总线使用11位 ID(甚至更多),在一个子系统中可有较多的单元。
LIN总线为单主机多从机系统,每一子系统中有且只有一个主机,所有的信息传送都 由主机控制,从机必须等待主机发出了与它对应的ID后才能发送信息。LIN总线使用6位 ID,在一个子系统中只能有较少的单元。
可靠性对比
CAN总线采用可靠性很高的CRC校验。LIN总线采用可靠性相对较差的带进位的和校验。
成本对比
CAN总线能用于各种信息传送的场合,但成本较高,工艺性相对差些。LIN总线只能用于对速率及可靠性要求不是很高的场合,如舒适系统或某些子系统等, 优点是成本低,工艺性好。
-
什么是LIN总线? CAN和LIN的区别2020-05-04 125948
-
LIN总线的基础知识2022-09-15 4476
-
基于CAN_LIN总线的混合网关设计2012-08-20 3717
-
U2carbus测试 汽车单、双线can总线 lin总线2014-05-06 9353
-
基于CAN LIN总线的车身网络控制系统2010-07-13 910
-
汽车CAN/LIN总线测试流程和测试工具解析2010-03-19 9009
-
CAN、LIN总线在车载网络中的应用2011-06-09 1343
-
基于CAN LIN总线通信的汽车BCM的系统设计2017-09-05 1415
-
基于单片机实现CAN总线与LIN总线间的传输设计方案2020-01-16 8528
-
高速CAN、容错CAN、LIN总线的区别是什么2020-12-06 10212
-
LIN总线是什么?CAN/LIN总线的区别与结构2021-03-17 30058
-
LIN总线的特点及波形2023-02-13 8307
-
什么是LIN总线?车载总线之LIN总线概述2023-07-26 22830
-
什么是LIN总线?lin总线和can总线有何区别2023-09-13 27997
-
CAN总线与LIN总线的区别2024-11-12 7863
全部0条评论

快来发表一下你的评论吧 !
