

еҖ’з«Ӣж‘ҶжҳҜд»Җд№Ҳ_еҖ’з«Ӣж‘Ҷжңүд»Җд№Ҳз”Ё
з”өеӯҗеёёиҜҶ
жҸҸиҝ°
гҖҖгҖҖеҖ’з«Ӣж‘ҶжҺ§еҲ¶зі»з»ҹпјҲInvertedPendulumSystemз®Җз§°IPSпјүжҳҜдёҖдёӘеӨҚжқӮзҡ„гҖҒдёҚзЁіе®ҡзҡ„гҖҒйқһзәҝжҖ§зі»з»ҹпјҢжҳҜиҝӣиЎҢжҺ§еҲ¶зҗҶи®әж•ҷеӯҰеҸҠејҖеұ•еҗ„з§ҚжҺ§еҲ¶е®һйӘҢзҡ„зҗҶжғіе®һйӘҢе№іеҸ°гҖӮеҜ№еҖ’з«Ӣж‘Ҷзі»з»ҹзҡ„з ”з©¶иғҪжңүж•Ҳзҡ„еҸҚжҳ жҺ§еҲ¶дёӯзҡ„и®ёеӨҡе…ёеһӢй—®йўҳпјҡеҰӮйқһзәҝжҖ§й—®йўҳгҖҒйІҒжЈ’жҖ§й—®йўҳгҖҒй•Үе®ҡй—®йўҳгҖҒйҡҸеҠЁй—®йўҳд»ҘеҸҠи·ҹиёӘй—®йўҳзӯүгҖӮйҖҡиҝҮеҜ№еҖ’з«Ӣж‘Ҷзҡ„жҺ§еҲ¶пјҢз”ЁжқҘжЈҖйӘҢж–°зҡ„жҺ§еҲ¶ж–№жі•жҳҜеҗҰжңүиҫғејәзҡ„еӨ„зҗҶйқһзәҝжҖ§е’ҢдёҚзЁіе®ҡжҖ§й—®йўҳзҡ„иғҪеҠӣгҖӮеҗҢж—¶пјҢе…¶жҺ§еҲ¶ж–№жі•еңЁеҶӣе·ҘгҖҒиҲӘеӨ©гҖҒжңәеҷЁдәәе’ҢдёҖиҲ¬е·ҘдёҡиҝҮзЁӢйўҶеҹҹдёӯйғҪжңүзқҖе№ҝжіӣзҡ„з”ЁйҖ”пјҢеҰӮжңәеҷЁдәәиЎҢиө°иҝҮзЁӢдёӯзҡ„е№іиЎЎжҺ§еҲ¶гҖҒзҒ«з®ӯеҸ‘е°„дёӯзҡ„еһӮзӣҙеәҰжҺ§еҲ¶е’ҢеҚ«жҳҹйЈһиЎҢдёӯзҡ„е§ҝжҖҒжҺ§еҲ¶зӯүгҖӮ
гҖҖгҖҖеҖ’з«Ӣж‘Ҷзҡ„еҗ«д№ү
гҖҖгҖҖеҖ’з«Ӣж‘Ҷзҡ„жң¬иҙЁжҳҜд»ҘдёҖдёӘж”ҜзӮ№ж”Ҝж’‘иө·дёҖдёӘзү©дҪ“зҡ„зҠ¶жҖҒпјҢиҝҷдёӘзҠ¶жҖҒйҖҡеёёжҳҜдёҚзЁіе®ҡзҡ„гҖӮ
гҖҖгҖҖеҖ’з«Ӣж‘ҶжҳҜдёӘзү©зҗҶи®ҫеӨҮпјҢе®ғеҢ…жӢ¬дёҖдёӘеңҶжҹұдҪ“зҡ„жЈ’еӯҗпјҲйҖҡеёёжҳҜй“қзҡ„пјүеҸҜд»ҘеңЁдёҖдёӘж”ҜзӮ№е‘ЁеӣҙжҢҜиҚЎгҖӮиҝҷдёӘж”ҜзӮ№жҳҜе®үеңЁдёҖдёӘиҪҰжһ¶дёҠпјҢе®ғзҡ„иҪ¬еҠЁж–№еҗ‘жҳҜж°ҙе№ізҡ„еҒҸиҪ¬гҖӮе°ҸиҪҰжҳҜз”ұдёҖдёӘ马иҫҫжҺ§еҲ¶зҡ„пјҢе®ғеҸҜд»Ҙиҝҗз”ЁдәҺдёҖдёӘеҸҳеҠӣгҖӮжЈ’еӯҗдјҡжңүиҮӘ然зҡ„и¶ӢеҠҝд»ҺжңҖй«ҳзҡ„з«–зӣҙдҪҚзҪ®дёӢиҗҪпјҢйӮЈжҳҜдёҖдёӘдёҚзЁіе®ҡзҡ„е№іиЎЎдҪҚзҪ®гҖӮ
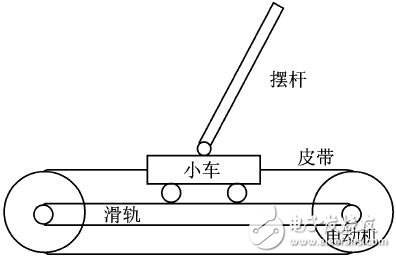
дёҖзә§еҖ’з«Ӣж‘Ҷз»“жһ„з®Җеӣҫ
гҖҖгҖҖеҖ’з«Ӣж‘ҶжҺ§еҲ¶зі»з»ҹеҲҶзұ»
гҖҖгҖҖеҖ’з«Ӣж‘Ҷзі»з»ҹжҢүж‘ҶжқҶж•°йҮҸзҡ„дёҚеҗҢпјҢеҸҜеҲҶдёәдёҖзә§пјҢдәҢзә§пјҢдёүзә§еҖ’з«Ӣж‘ҶзӯүпјҢеӨҡзә§ж‘Ҷзҡ„ж‘ҶжқҶд№Ӣй—ҙеұһдәҺиҮӘз”ұиҝһжҺҘпјҲеҚіж— з”өеҠЁжңәжҲ–е…¶д»–й©ұеҠЁи®ҫеӨҮпјүгҖӮ
гҖҖгҖҖеҲҶзұ»ж ҮеҮҶеҸҜд»ҘеҪўиұЎзҡ„иЎЁзӨәдёәеҪ“дёҖдёӘдәәз”ЁжүӢжүҳиө·дёҖдёӘз«№з«ҝдҪҝд»–дёҚеҖ’пјҢзұ»дјјиҝҷз§Қзі»з»ҹе°ұжҳҜдёҖдёӘдёҖзә§еҖ’з«Ӣж‘Ҷзі»з»ҹпјҢйҖҡиҝҮеҜ№з«№з«ҝзҡ„еә•з«Ҝзҡ„移еҠЁи®©з«№з«ҝзҡ„йҮҚеҝғз»ҙжҢҒеңЁе®ғзҡ„жӯЈдёӢж–№йҷ„иҝ‘ж‘ҶеҠЁпјҢеҪўжҲҗдёҖдёӘеҠЁжҖҒзҡ„е№іиЎЎпјҢдҪҝз«№з«ҝдёҚдјҡеҖ’дёӢжқҘпјҢеҰӮжһңеңЁиҝҷдёӘз«№з«ҝдёҠйқўеҶҚйЎ¶дёҖдёӘз«№з«ҝпјҢдҪҝдёӨдёӘз«№з«ҝйғҪз«ӢеңЁжүӢдёҠдёҚеҖ’пјҲе…¶дёӯдёҖдёӘйЎ¶еңЁеҸҰдёҖдёӘзҡ„дёҠйқўпјүпјҢиҝҷж ·зҡ„зі»з»ҹе°ұеҸ«дәҢзә§еҖ’з«Ӣж‘Ҷзі»з»ҹпјҢеҖ’з«Ӣж‘Ҷзә§еҲ«и¶Ҡй«ҳпјҢеҸ иө·жқҘзҡ„з«№з«ҝе°ұи¶ҠеӨҡд№ҹи¶Ҡйҡҫд»ҘжҺ§еҲ¶гҖӮ
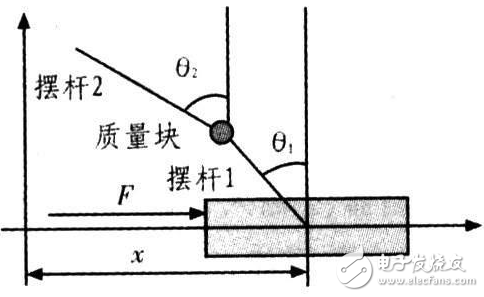
дәҢзә§еҖ’з«Ӣж‘Ҷз»“жһ„з®Җеӣҫ
гҖҖгҖҖеҖ’з«Ӣж‘Ҷзҡ„дҪңз”Ё
гҖҖгҖҖе®һж—¶еҖ’з«Ӣж‘ҶйҖҡеёёиў«дҪңдёәдёҖдёӘеҹәеҮҶпјҢеҺ»жөӢиҜ•иҪҜ件еңЁзҠ¶жҖҒз©әй—ҙжҺ§еҲ¶еҷЁиҝҗз®—жі•еҲҷдёӢзҡ„жңүж•ҲжҖ§е’ҢжҖ§иғҪпјҢд№ҹе°ұжҳҜе®һз”Ёзҡ„ж“ҚдҪңзі»з»ҹгҖӮдәӢе®һдёҠиҝҗз®—жі•еҲҷжҳҜйҖҡиҝҮж•°еҖјзӮ№е®һзҺ°зҡ„иҜҘж•°еҖјзӮ№зңӢдҪңдёҖз»„дә’еҠ©зҡ„еҚҸеҗҢж“ҚдҪңзҡ„д»»еҠЎпјҢе®ғжҳҜе‘ЁжңҹжҖ§зҡ„йҖҡиҝҮж ёеҝғзҡ„жҙ»еҠЁпјҢе®ғжү§иЎҢдёҚеҗҢзҡ„и®Ўз®—гҖӮиҝҷдәӣд»»еҠЎеҰӮдҪ•жҙ»еҠЁзҡ„ж–№жі•пјҲдёҫдҫӢжқҘиҜҙжҝҖжҙ»е‘Ҫд»Өпјүиў«з§°дҪңд»»еҠЎзҡ„ж—¶еәҸе®үжҺ’гҖӮеҫҲжҳҺжҳҫжҜҸдёӘд»»еҠЎзҡ„ж—¶еәҸе®үжҺ’еҜ№жҺ§еҲ¶еҷЁзҡ„дёҖдёӘеҘҪзҡ„жҖ§иғҪжҳҜиҮіе…ізҙ§иҰҒзҡ„пјҢеӣ жӯӨеҜ№дёҖдёӘж‘Ҷзҡ„зЁіе®ҡжҖ§жҳҜжңүж•Ҳзҡ„гҖӮеҰӮжӯӨеҖ’з«Ӣж‘ҶеңЁеҶіе®ҡжҳҜеҗҰдёҖдёӘзү№ж®Ҡзҡ„ж—¶еәҸе®үжҺ’зҡ„йҖүжӢ©жҜ”еҸҰдёҖдёӘеҘҪпјҢеңЁе“ӘдёӘжғ…еҪўдёӢпјҢеңЁд»Җд№ҲзЁӢеәҰеҶ…зӯүй—®йўҳдёҠжҳҜйқһеёёжңүз”Ёзҡ„гҖӮ
гҖҖгҖҖз ”з©¶еҖ’з«Ӣж‘Ҷзі»з»ҹе…·жңүзҡ„жҢ‘жҲҳж„Ҹд№үдёҚд»…д»…жҳҜз”ұдәҺзә§ж•°зҡ„еўһеҠ иҖҢдә§з”ҹзҡ„жҺ§еҲ¶йҡҫеәҰпјҢ并且з”ұдәҺд»–зҡ„жң¬иә«жүҖе…·жңүзҡ„еӨҚжқӮжҖ§гҖҒдёҚзЁіе®ҡжҖ§д»ҘеҸҠйқһзәҝжҖ§зҡ„зү№зӮ№иҝӣиҖҢдёҚж–ӯз ”з©¶жӢ“еұ•зҡ„ж–°зҡ„зҗҶи®әж–№жі•пјҢд»Ҙеә”з”ЁеҲ°ж–°зҡ„жҺ§еҲ¶еҜ№иұЎдёӯпјҢжҸҗдҫӣжӣҙеҘҪзҡ„е®һйӘҢзҗҶи®әе’Ңе®һйӘҢе№іеҸ°гҖӮеҜ№дәҺжңәеҷЁдәәзҡ„зӣҙз«ӢиЎҢиө°пјҢиҲӘеӨ©йЈһиЎҢеҷЁзҡ„йЈһиЎҢе№ізЁіжҺ§еҲ¶йғҪе…·жңүйқһеёёеӨ§зҡ„ж„Ҹд№үпјҢдёҚж–ӯиҝӣиЎҢзҗҶи®әдёҺе·Ҙдёҡзҡ„е®һи·өз»“еҗҲпјҢжҺЁеҠЁз§‘еӯҰжҠҖжңҜзҡ„еҸ‘еұ•пјҢжӣҙеҠ е№ҝжіӣзҡ„еә”з”ЁеҲ°з»ҸжөҺжҙ»еҠЁдёӯгҖӮиҝҷеҜ№дәҺиҲӘз©әиҲӘеӨ©жҠҖжңҜзҡ„иҝӣжӯҘе…·жңүйқһеёёеӨ§зҡ„зҗҶи®әж„Ҹд№үе’Ңе®һйҷ…ж„Ҹд№үпјҢе…·жңүйқһеёёе№ҝйҳ”зҡ„з ”з©¶еүҚжҷҜгҖӮ
- зӣёе…іжҺЁиҚҗ
- зғӯзӮ№жҺЁиҚҗ
- е
-
и°ҒжңүеҖ’з«Ӣж‘Ҷзҡ„зЁӢеәҸ2015-06-09 8163
-
дҪ 们еҒҡеҖ’з«Ӣж‘Ҷж—¶еҜ№еҖ’з«Ӣж‘ҶиҝӣиЎҢе»әжЁЎдәҶеҗ—пјҹ2015-07-29 4860
-
еҖ’з«Ӣж‘Ҷзі»з»ҹз®Җд»Ӣ2021-09-01 1523
-
е…ідәҺеҖ’з«Ӣж‘Ҷзҡ„й—®йўҳжҸҸиҝ°2021-09-07 1387
-
еҖ’з«Ӣж‘ҶиҜҘеҰӮдҪ•еҺ»е®һзҺ°е‘ў2021-12-23 1828
-
еҖ’з«Ӣж‘Ҷзҡ„жЁЎзіҠжҺ§еҲ¶з ”究2010-12-29 716
-
зҺҜеҪўеҖ’з«Ӣж‘Ҷ2011-04-05 1750
-
жҷәиғҪжҺ§еҲ¶еңЁеҖ’з«Ӣж‘ҶжҺ§еҲ¶зі»з»ҹдёӯзҡ„еә”з”Ё2011-07-06 1820
-
еҹәдәҺеҸҳйҖҹз§ҜеҲҶзҡ„PIDдёҖзә§еҖ’з«Ӣж‘Ҷз ”з©¶2012-02-03 1077
-
移еҠЁзҡ„еҖ’з«Ӣж‘Ҷиө„ж–ҷ2015-11-20 840
-
ж—ӢиҪ¬еҖ’з«Ӣж‘ҶжәҗзЁӢеәҸ2016-07-15 1169
-
дёҖзә§еҖ’з«Ӣж‘Ҷзҡ„PIDжҺ§еҲ¶и®ҫи®Ў2016-11-08 1957
-
еҹәдәҺSTM32е’ҢеўһйҮҸPIDзҡ„ж—ӢиҪ¬еҖ’з«Ӣж‘Ҷзҡ„и®ҫи®Ў2017-07-29 2480
-
еҖ’з«Ӣж‘Ҷзҡ„matlabд»ҝзңҹе»әжЁЎжЎҲдҫӢ2018-01-02 2467
-
PIDеҸӮж•°еҰӮдҪ•и®ҫе®ҡи°ғиҠӮеҸҠеҖ’з«Ӣж‘ҶиҜҙжҳҺжұҮжҖ»дёҺеҖ’з«Ӣж‘ҶзЁӢеәҸе…Қиҙ№дёӢиҪҪ2019-10-29 2118
е…ЁйғЁ0жқЎиҜ„и®ә

еҝ«жқҘеҸ‘иЎЁдёҖдёӢдҪ зҡ„иҜ„и®әеҗ§ !
