

深度剖析航空电子嵌入式实时操作系统设计思路
描述
在传统的嵌入式实时操作系统中,内核和应用都运行在同一特权级,应用程序可以无限制的访问整个系统地址空间。因此在某些情况下,应用的潜在危险动作会影响其他应用和内核的正常运行,甚至导致系统崩溃或者误操作。国外各大嵌入式开发商相继推出此类支持ARINC653,具有内核和应用保护机制的操作系统。但在国内的嵌入式领域,这样的研究还有一定差距。基于此,本文提出了一种航空电子嵌入式实时操作系统(A-RTOS,Avionics RTOS)的一种设计思路,并在具有MMU和支持高级保护模式的目标板上完成了实现。
航空电子标准ARINC653
ARINC653主要阐述了模块化综合航空电子设备IMA(Integrated Modular Avionics)使用的应用软件的基线操作环境。它定义了航空应用与下层操作环境之间的接口和数据交换的模式以及服务的行为,并描述了嵌入式航空电子软件的运行时环境
ARINC653 Supplement 1对ARINC653的补充主要包括以下几点:在系统结构上,提出了System Partition的概念,明确区间上的应用调度应该是区间级别的,这些应用共享区间资源;区间管理方面,阐述区间调度中主时间框架的定义原则,并补充了区间模式的变迁过程;对区间间通信的原则进行更为详尽的说明;增加关于健康监测的错误级别和错误处理的解释。
软件构成
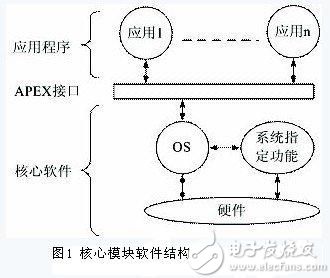
航空电子中的核心模块软件包括两类:应用软件和核心软件。位于应用软件和操作系统OS之间的APEX(APplication EXecutive)接口,定义了系统为应用软件提供的一个功能集合。利用这个功能集合,应用软件可以控制系统的调度,通信和内部状态信息。APEX接口相当于为应用提供的一种高层语言。而对于OS来说,是关于参数和入口机制的定义。
图1给出了ARINC653中各部分之间的关系
分区和区间管理
分区(Partitioning)是ARINC653中一个核心概念。在IMA(Integrated Modular Avionics)系统中,一个核心模块会包含一个或多个航空电子应用,并且这些应用要能够独立运行。分区就是航空电子应用中的一个功能划分。分区的单位称为区间,区间内的每一个执行单元称为进程。每一个区间具有自己独立的数据、上下文和运行环境,这样做的好处是能够防止一个区间的错误影响到其他区间。另外,它能使得整个系统容易验证、确认和认证。
区间化以及区间的管理和调度是由OS来实现的。ARINC653为区间的调度规定了一种基于时间窗的循环调度算法。这种调度算法的原理如图2所示。
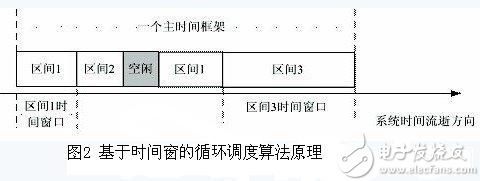
为了完成各区间的周期性调度,由OS维护一个固定时间长度的主时间框架,该时间框架在模块的运行期内周期性的重复。每个时间框架可以划分为若干个时间窗口。系统利用一个事先确定的配置表,在规定的时间窗口内激活对应区间的运行。这样就能够保证每个应用在分配给它的时间周期内访问公共资源不被打断。
ARINC supplement 1对主时间框架的时间定义原则进行了补充。它规定主时间框架的大小应该是核心模块中所有区间周期的最小公倍数的正整数倍,并应考虑到每个区间每次执行的时间长度和执行频率。
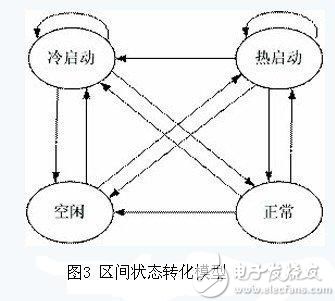
在ARINC653 Supplement 1发布时又增加了系统区间属性和启动条件属性。区间的工作模式包括空闲,冷启动,热启动和正常四种,如图3所示。每个区间所需资源在系统构建时指定,在区间初始化完成时区间对象创建。OS在进入运行模式时启动应用区间,然后区间进入正常运行模式。监测管理功能在响应致命错误时将重启区间或者停止区间的运行。
A-RTOS系统设计与实现
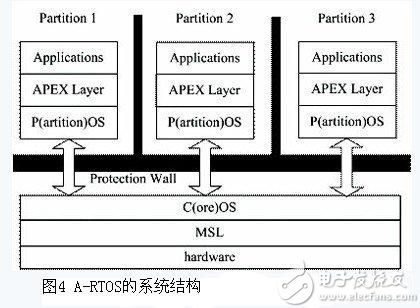
A-RTOS的系统结构如图4所示。在此系统中,各个应用工作在所属区间的环境中,并且应用和内核及各个应用之间都被保护墙隔离,无法相互破坏,从而保证了核心模块的可靠性。
隔离和保护机制
隔离和保护是ARINC653首要强调的特性,也是必须解决的重点之一。A-RTOS主要采用两种方式来实现应用与内核以及应用之间的隔离和保护。
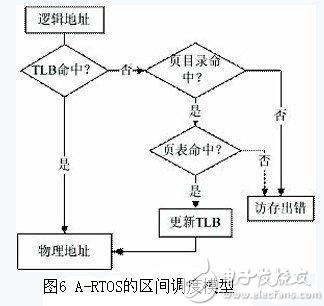
第一种方式是使用内存管理单元MMU。通过MMU能够实现逻辑地址到物理地址的转化,并且对访问权限进行控制。这样可以保护操作系统内核不受应用软件有意或无意的破坏,也有效的防止了各应用软件之间的相互破坏。图5给出了MMU的页目录/页表方式的地址转换流程。
第二种方式就是系统调用。A-RTOS为了实现对内核及应用之间的保护,提供了两种运行形态:用户态和系统态。其中操作系统内核是运行在系统态的。因此用户态的应用是不能够直接调用系统内核提供的功能接口的,必须通过TRAP系统调用方式来进行。
此种方式下,当用户态的应用需要调用内核提供的系统调用时,首先要执行一组特殊的指令使系统进入系统态以便执行需要的系统调用,当调用完成后,内核将执行另一组特征指令将系统返回到用户态。
每种支持保护模式的系统都提供了专门的软中断命令来完成从用户态进入系统态的功能。系统挂接一个软中断处理函数,所有的系统调用都通过这个软中断进入并以不同的参数值(即系统调用号)来加以区分。
系统调用的另一种形式是称为CALL-LIB的调用库机制。此种机制类似于windows系统的动态链接库,可以满足动态加载和更新组件的需要,也是A-RTOS的特点之一。
区间调度机制
ARINC653规定,区间调度模式的主要特征是:1)调度单元是区间;2)区间没有优先级;3)调度算法是预先确定的,按照固定的周期重复,并且只能由系统集成者进行配置。每个循环中,至少要为区间分配一个区间窗口。
在A-RTOS中,为了方便系统处理和能更好符合ARINC653规范,对以上规定进行了一定程度的修订:调度单元是区间和系统进程;区间具有优先级。但这些修订不影响操作系统区间层POS以及应用程序使用者,所以在外部特性上并不与ARINC653规定违背。
除此之外, A-RTOS还引入两个系统区间:Kernel区间和Idle区间。Kernel区间优先级最高,用于为整个系统的运行提供支持;并且一些系统级进程,也属于Kernel区间,方便调度。Idle区间具有最低的优先级,用于填充系统时间。当系统中没有其他区间可以运行,就运行Idle区间。
A-RTOS区间的调度原则是首先基于优先级调度,对同一优先级的区间可使用时间片轮转调度或者基于时间窗的循环调度策略。
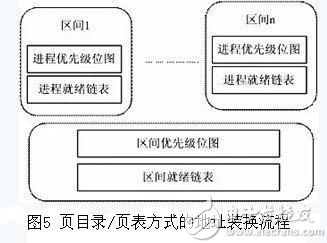
A-RTOS采用两级调度机制。系统中具有区间的优先级位图和每个优先级对应的就绪链表,每个区间中也包含系统进程的优先级位图和对应的就绪链表。利用优先级位图和就绪链表,可以很容易的实现对区间和系统进程的调度。图6给出了这种调度模型。
调度模块首先根据系统中的区间优先级位图和区间就绪链表来进行区间调度,被调度到的区间再根据区间内的进程优先级位图和进程就绪链表进行系统进程的调度。此方法相对于一级调度方式而言,能够保证调度时间的确定性,系统调度时间不会因为区间和系统进程的多少而发生变化,符合实时操作系统的定义。
在进行基于时间窗调度时,两个系统区间实际上也会参与调度。Kernel区间的运行时间会计算在区间调度配置表中当前区间的运行时间上。因此对于某应用区间而言,它的运行时间实际上会包含系统区间的运行。
进程池机制
在A-RTOS中,进程池是指一组由系统进行维护的进程,这些进程能够为应用提供一组服务。应用通过系统提供的调用接口对系统提出应用请求,系统把应用的请求交给进程池,进程池自动选择一个空闲进程对其进行服务,当服务完毕以后,系统会回收该系统进程。
进程池主要应用在时钟定时器服务、中断服务和异步IO操作。
异步信号和异步IO机制
A-RTOS支持异步信号机制,允许在某种情况下COS以异步方式发送信号到上层的POS。异步信号的一个典型使用就是异步IO。这是由于在ARINC653的应用中,POS中的进程通过系统调用产生阻塞性IO请求的时候,如果IO不是异步的,则此时该进程就会阻塞,等待系统调用的返回。但是COS并不知道POS中的应用进程的存在,当其中的一个进程阻塞的时候,整个区间都会被阻塞。采用异步IO方式可避免这种情况的发生。
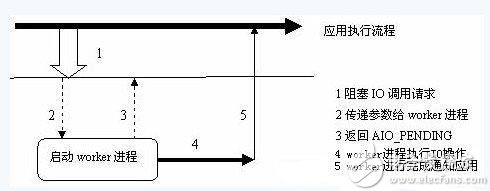
图7 异步IO工作流程示意图
当应用请求了阻塞性的IO服务时,A-RTOS会启动称为一个系统进程来进行应用请求的IO操作,这就是异步IO机制。A-RTOS将这种为实现异步IO操作而创建的系统进程称为worker进程。
如图7,在ARINC653的应用中,当POS中的一个进程调用异步IO系统调用时,该系统调用检查此IO是否为阻塞工作方式,如果是,则创建一个worker进程去完成这个要求的IO工作,并返回一个AIO_PENDING值到POS。POS检查到这个返回值以后,把正在进行异步IO调用的进程从就绪队列取下放到等待队列,然后进行重调度。当worker进程完成了要求的IO操作时,即发送异步信号到POS,从而唤醒原阻塞进程。
-
嵌入式实时操作系统的特点2025-11-13 295
-
航空电子嵌入式实时操作系统计思路2019-07-11 1673
-
嵌入式实时操作系统rtems的特点是什么2021-12-14 1256
-
嵌入式实时操作系统实验2021-12-22 1153
-
嵌入式实时操作系统教程2009-04-19 1529
-
嵌入式操作系统实时性比对与分析2009-03-29 2186
-
实时操作系统用于嵌入式应用系统的设计2011-10-10 822
-
嵌入式实时操作系统设计方案2011-11-21 1594
-
嵌入式实时操作系统MQX内核研究2017-10-31 1512
-
米尔科技嵌入式实时操作系统介绍2019-11-25 3448
-
不同的实时嵌入式Linux操作系统有什么差异2019-11-06 1960
-
嵌入式实时操作系统的应用详细教程说明2019-12-05 1751
-
嵌入式实时操作系统2021-10-20 2077
-
嵌入式操作系统2021-11-03 2442
-
再谈嵌入式实时操作系统2024-04-09 2096
全部0条评论

快来发表一下你的评论吧 !
