

物联网系统中的自动驾驶的“眼睛”_纯固态激光雷达
电子说
描述
物联网系统中为什么要使用纯固态激光雷达

物联网系统中使用纯固态激光雷达的原因主要基于其独特的优势和应用价值,这些优势使得纯固态激光雷达在物联网的多个领域中都发挥着重要作用。以下是详细的分析:
纯固态激光雷达的优势
1、高精度和高分辨率:
纯固态激光雷达能够实现对目标的精确测量和识别,其高精度和高分辨率的特性使得它在物联网系统中能够提供更准确的数据支持。
2、高可靠性和低故障率:
相比传统的机械激光雷达,纯固态激光雷达没有机械转动部件,因此具有更高的可靠性和更低的故障率。这对于需要长时间稳定运行的物联网系统来说至关重要。
3、易于集成和低成本:
纯固态激光雷达的固态器件体积小、重量轻,易于集成到各种物联网设备中。同时,其生产成本相对较低,有利于降低物联网系统的整体成本。
4、高安全性和低风险:
纯固态激光雷达能够实现对目标的精确测距和识别,有效提高了物联网系统在复杂环境中的安全性,降低了潜在的风险。
5、探测距离远、抗干扰能力强:
纯固态激光雷达具有较远的探测距离和强大的抗干扰能力,能够在复杂环境中稳定工作,为物联网系统提供可靠的数据支持。
纯固态激光雷达在物联网系统中的应用
1、自动驾驶:
在自动驾驶汽车中,纯固态激光雷达能够实时感知周围环境,提供高精度的距离、速度和方向信息,为自动驾驶决策提供可靠支持。
2、机器人导航与避障:
在机器人领域,纯固态激光雷达可以帮助机器人实现精准导航和避障功能,提高机器人在复杂环境中的自主移动能力。
3、无人机定位与测绘:
无人机搭载纯固态激光雷达可以实现精准定位和测绘功能,为地理信息采集、环境监测等领域提供高效、准确的解决方案。
4、智能家居与安防:
在智能家居和安防领域,纯固态激光雷达可以用于人体检测、入侵报警等场景,提高家居安全和安防系统的智能化水平。
5、智能交通系统:
纯固态激光雷达可以用于智能交通系统中,实现车辆检测、交通流量统计、交通拥堵分析等功能。通过实时监测道路交通情况,可以为交通管理部门提供数据支持,优化交通流组织和交通管理。
综上所述,物联网系统中使用纯固态激光雷达的原因主要在于其高精度、高可靠性、易于集成、低成本以及广泛的应用价值。纯固态激光雷达的这些优势使得它在自动驾驶、机器人、无人机、智能家居等多个物联网领域中都发挥着重要作用,为物联网系统的智能化、高效化提供了有力支持。
本文会再为大家详解激光雷达家族中的一员——纯固态激光雷达
纯固态激光雷达的定义
理论上来说,固态激光雷达是完全没有移动部件的雷达,光相控阵(Optical Phased Array)及Flash是其典型技术路线,也被认为是纯固态激光雷达方案。
但近年来,一些非完全旋转的激光雷达也被统称为“固态激光雷达”,它们具备了固态激光雷达很多的性能特点,如分辨率高、有限水平FOV(前向而不是360°)等,但这些技术方案会有一些微小的移动部件,从严格意义上来说不能算纯固态激光雷达。
纯固态激光雷达的原理
固态激光雷达主要是依靠波的反射或接收来探测目标的特性,大多源自三维图像传感器的研究,实际源自红外焦平面成像仪,焦平面探测器的焦平面上排列着感光元件阵列,从无限远处发射的红外线经过光学系统成像在系统焦平面的这些感光元件上,探测器将接受到光信号转换为电信号并进行积分放大、采样保持,通过输出缓冲和多路传输系统,最终送达监视系统形成图像。
纯固态激光雷达的分类
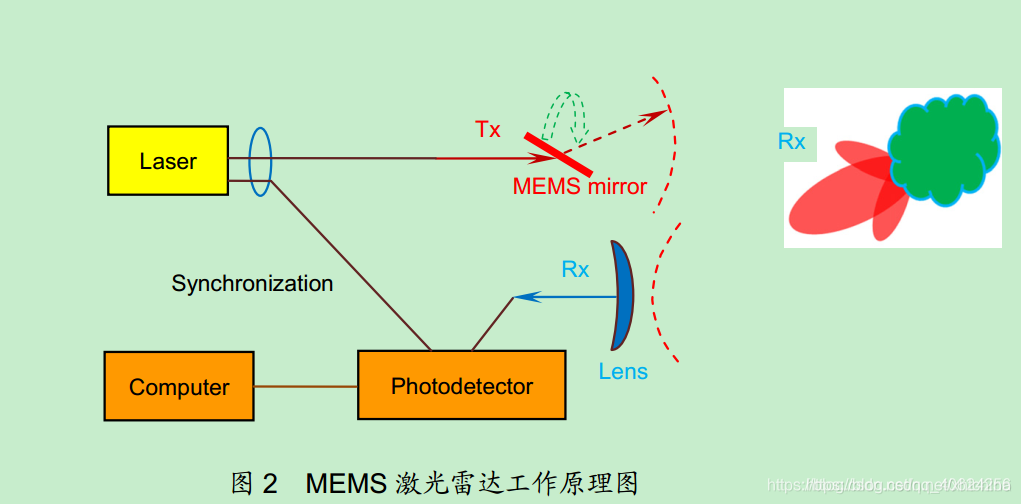
3.1.MEMS(Micro-Electro-Mechanical System)微机电系统
MEMS指代的是将机械机构进行微型化、电子化的设计,将原本体积较大的机械结构通过微电子工艺集成在硅基芯片上,进行大规模生产。技术成熟,完全可以量产。主要是通过MEMS微镜来实现垂直方面的一维扫描,整机360度水平旋转来完成水平扫描,而其光源是采用光纤激光器,这主要是由于905纳米的管子重频做不高,重频一高平均功率就会太大,会影响激光管的寿命。
采用微振镜对进行激光束的偏转,它需要有平整的镜面,将机械式的激光雷达的旋转部件微缩.从严格意义上来说,MEMS并不算是纯固态激光雷达,这是因为在MEMS方案中并没有完全消除机械,而是将机械微型化了,扫描单元变成了MEMS微镜。
| 电热效应 | 对电热双压电晶片驱动的微振镜加热,由于金属铝的形变大于介质硅,从而形成微振镜的形变振动。参数:2.3V,9°偏转;施加12mw电功率,响应速度74Hz。 |
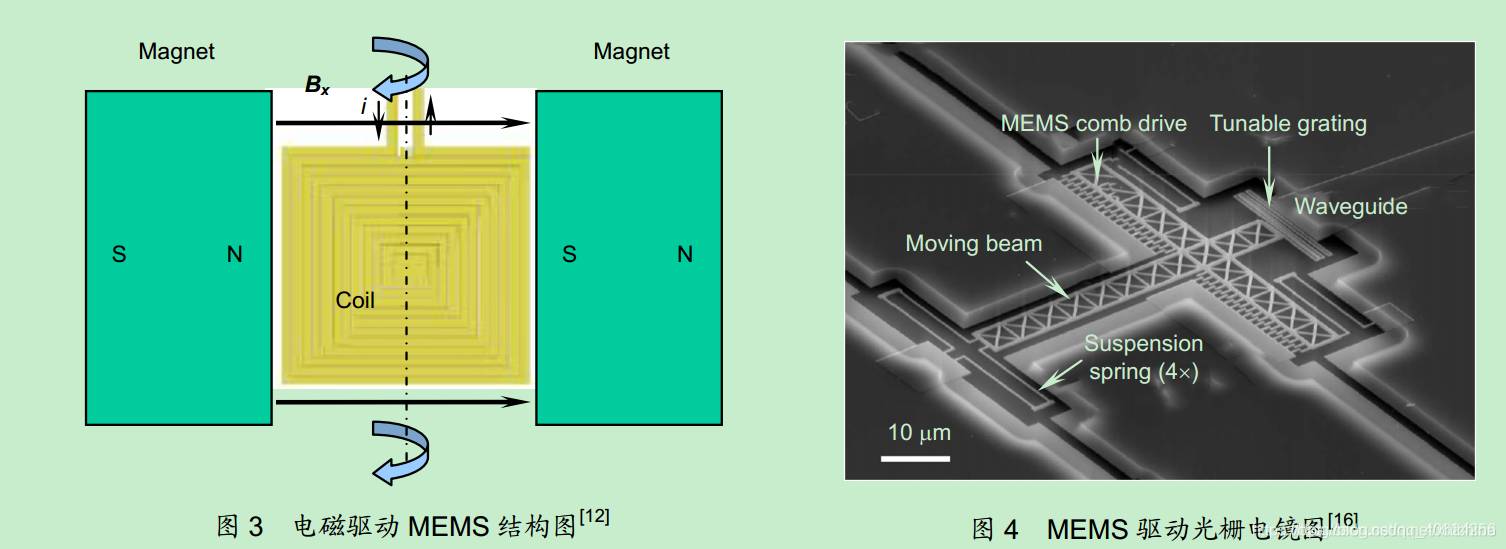
| 电磁效应 | 内部需要封装可动磁性物质或者可动磁性线圈产生磁场。通过施加磁场产生洛伦兹力使得线圈产生偏转,从而驱动MEMS振镜偏转,响应速率可达10kHz |
| 压电效应 | 需要异质材料的介入,压电材料具有高效率、响应速度快的优点。实验通过电镀在硅上沉积PZT薄膜,加工形成的MEMS结构并进行光学扫描,获得11.2kHz,39°视场 |
| 压电效应 | 具有尺寸小可单片全集成的优点,通常需要在真空环境下以获得更高的驱动效率,10V电压驱动可以得到10°的扫描角度。 |
| 压电效应 | 瑞典KTH的研究小组,近期验证了一种新方法,通过MEMS的改变光栅周期实现角度的偏转,在20V电压驱动下可以得到5.6°的扫描角度,功率消耗微瓦量级。也有包括MEMS改变光程差调控相位的相控阵。 |
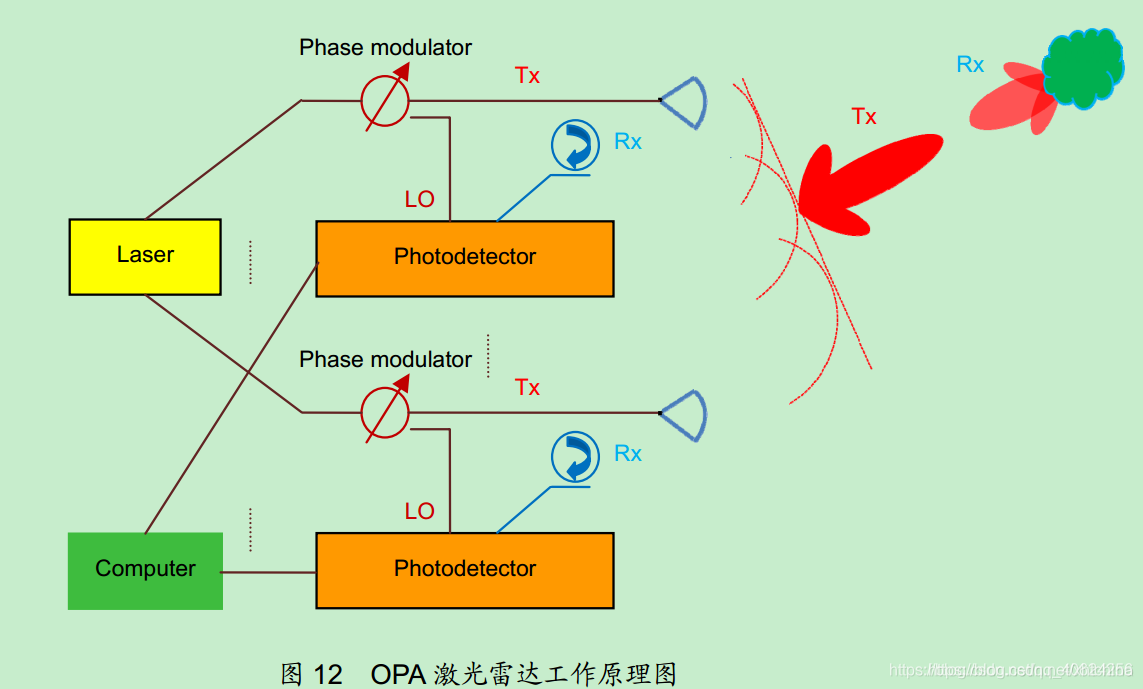
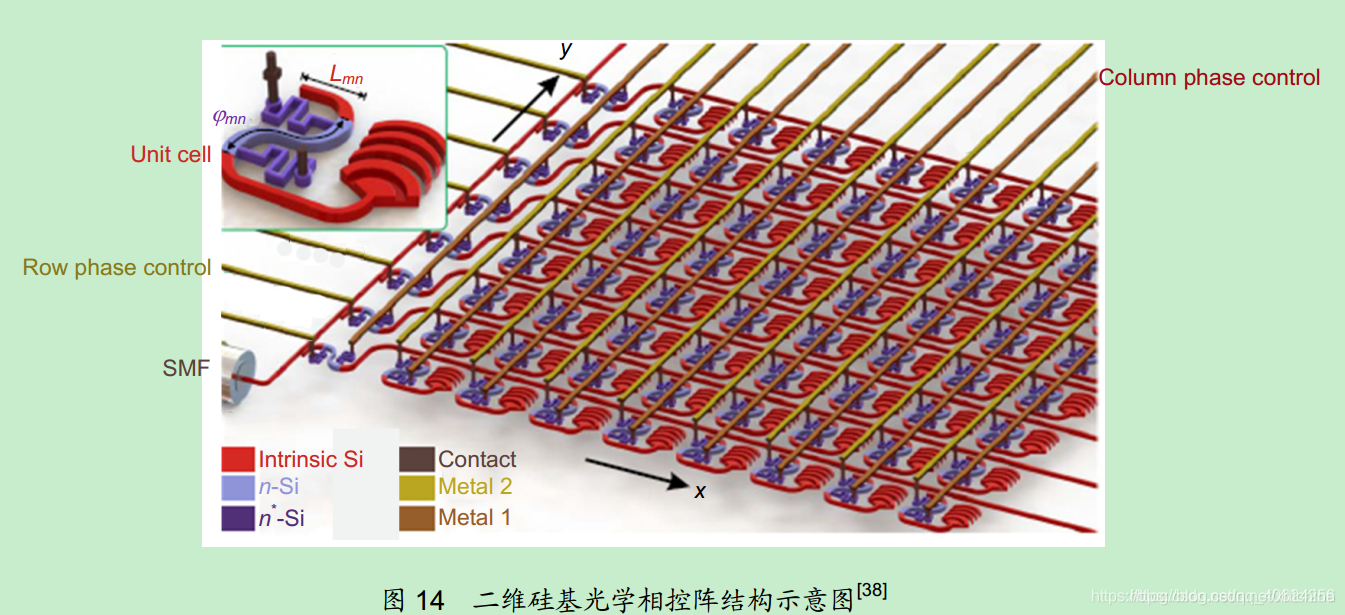
3.2.OPA(optical phased array)光学相控阵技术
相比其他技术方案,OPA方案给大家描述了一个激光雷达芯片级解决方案的美好前景,它主要是采用多个光源组成阵列,通过控制各光源发光时间差,合成具有特定方向的主光束。然后再加以控制,主光束便可以实现对不同方向的扫描。雷达精度可以做到毫米级,且顺应了未来激光雷达固态化、小型化以及低成本化的趋势,但难点在于如何把单位时间内测量的点云数据提高以及投入成本巨大等问题。
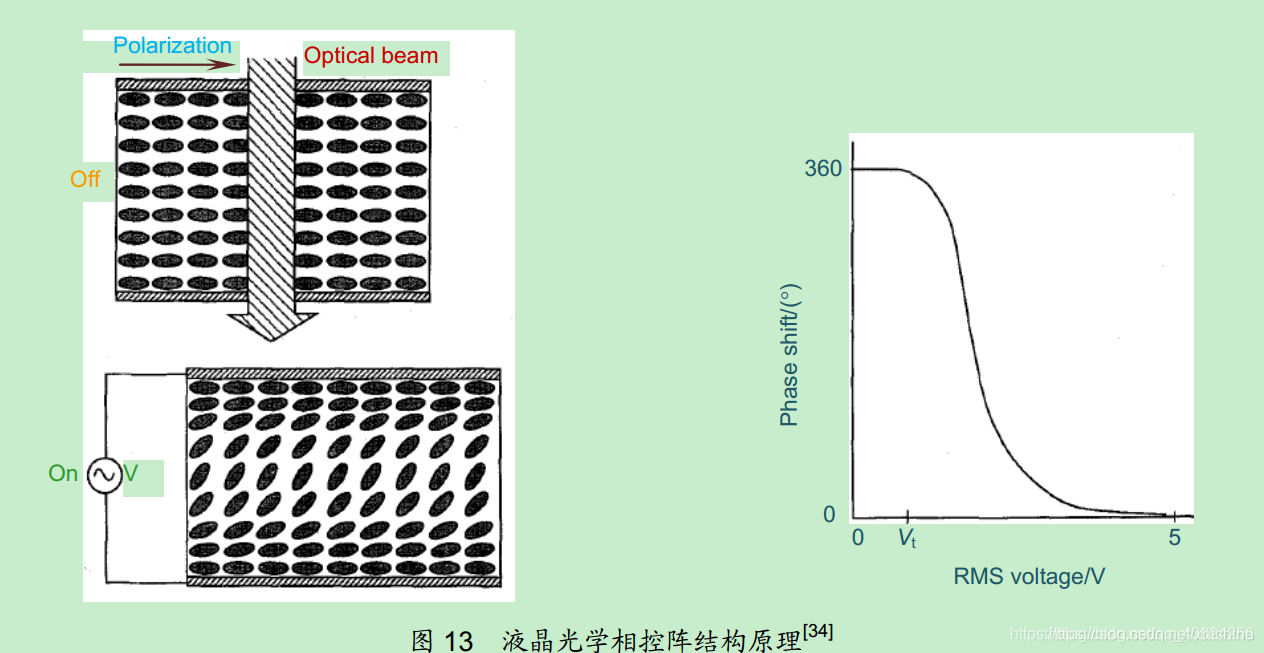
通过外加电压改变液晶的取向,从而实现不同阵元的相位调节;驱动电压小,易大面积集成,最大扫描角度+10°,扫描速度在亳秒量级。但响应速度较慢,目前可达200us。扫描精度较大。因为硅具有较高的热光系数,目前主要集中于如何有效地减小阵列串扰、提高扫描精度、增大扫描角度、提高热稳定性等问题,而且由于片上光功率较低,使得远距离探测存在困难.
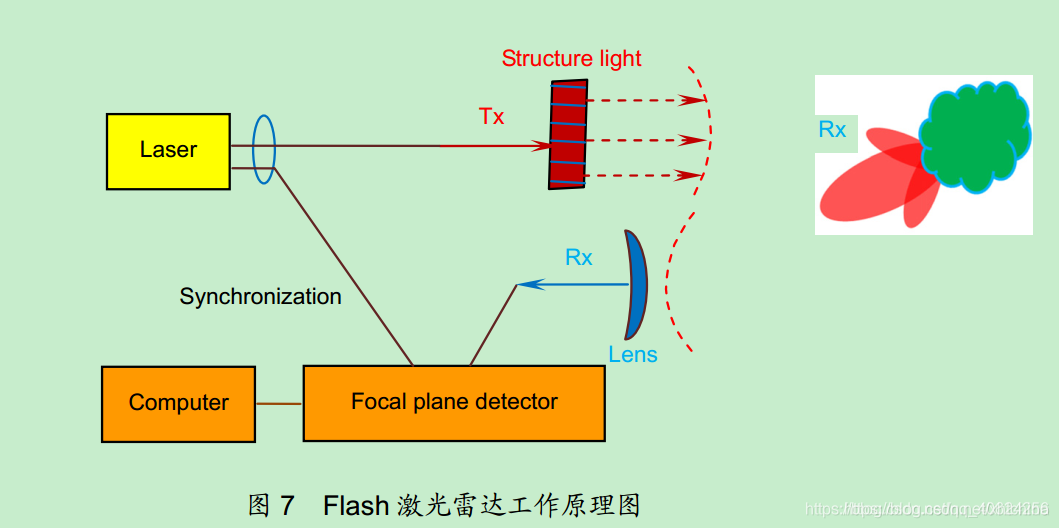
3.3.Flash
Flash激光雷达的原理也是快闪,它不像MEMS或OPA的方案会去进行扫描,而是短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器,来完成对环境周围图像的绘制。主要问题是探测距离近,在技术的可靠性方面存在问题,Flash激光雷达的距离分辨率力和角度分辨力主要取决于焦平面探测器阵列,焦平面探测器阵列使用PIN型光电探测器(近距离)或是雪崩光电探测器(远距离,价格昂贵)。
纯固态激光雷达的优劣势
利用光学相控阵扫描技术的固态激光雷达的确有很多优势,例如:
其结构简单,尺寸小,无需旋转部件,在结构和尺寸上可以大大压缩,提高使用寿命并使其成本降低。
扫描精度高,光学相控阵的扫描精度取决于控制电信号的精度,可以达到千分之一度量级以上。
可控性好,在允许的角度范围内可以做到任意指向,可以在重点区域进行高密度的扫描。
扫描速度快,光学相控阵的扫描速度取决于所用材料的电子学特性,一般都可以达到MHz量级。
当然固态激光雷达也同样存在一些劣势,如:
扫描角有限,固态意味着激光雷达不能进行360度旋转,只能探测前方。因此要实现全方位扫描,需在不同方向布置多个(至少前后两个)固态激光雷达
旁瓣问题,光栅衍射除了中央明纹外还会形成其他明纹,这一问题会让激光在最大功率方向以外形成旁瓣,分散激光的能量。
加工难度高,光学相控阵要求阵列单元尺寸必须不大于半个波长,一般目前激光雷达的工作波长均在1微米左右,故阵列单元的尺寸必须不大于500nm。而且阵列密度越高,能量也越集中,这都提高了对加工精度的要求,需要一定的技术突破。
接收面大、信噪比差:传统机械雷达只需要很小的接收窗口,但固态激光雷达却需要一整个接收面,因此会引入较多的环境光噪声,增加了扫描解析的难度。
纯固态激光雷达的厂商
td {white-space:nowrap;border:1px solid #dee0e3;font-size:10pt;font-style:normal;font-weight:normal;vertical-align:middle;word-break:normal;word-wrap:normal;}
| 厂商 | 国别 | 成立时间 | 主要投资机构 | 产品线 |
| Velodyne | 美国 | 1983 | 百度、福特 | 16、32、64、128线机械、32线MEMS |
| Quanergy | 美国 | 2012 | 三星,motusvantures、戴姆勒、德尔福 | OPA、8线机属 |
| 速腾聚创 | 中国 | 2014 | 东方富海、复星锐正、北汽产投 | 16、32、64线机械式、MEMS、OPA |
| 北醒光子 | 中国 | 2015 | IDG、沃勒斯机器人、顺为 | flash面阵 |
| 禾赛科技 | 中国 | 2013 | 远瞪资本、磐谷创投、百度 | 40、64线机械式、ZOLO固态 |
| 北科天绘 | 中国 | 2005 | 联想之星、star vc | 16、32、64线机械、flash面阵 |
| 光珀智能 | 中国 | 2013 | 浙江金控 | flash面阵 |
| LeddarTech | 加拿大 | 2007 | BDC、Venture capital、欧司朗、德尔福 | 8线机械式 |
| IBEO | 德国 | 2009 | 采埃孚(T1) | 4线机成式、MEMS |
| Luminar | 美国 | 2012 | 1517fund、GVA capital | MEMS |
| Innoviz | 以色列 | 2016 | Zohar Zisapel、三星、软银 | MEMS |
| Cepton | 美国 | 2016 | Micro-motion(类似MEMS) | |
| Innovusion | 美国 | 2016 | ** | MEMS |
| Orixy Vision | 以色列 | 2009 | Bessemer Venture Partner | COR相干光激光雷达 |
| Tetra Vue | 美国 | 2008 | Nautilars、三星、Robert Venture、富士康 | flash面阵 |
| 镭神智能 | 中国 | 2015 | 招商、如山、北极光、达晨 | 16线机械、OPA、flash面阵、MEMS |
| Ouster | 美国 | 2015 | Cox Enterprises | 64线机械 |
| Strobe | 美国 | 2014 | 通用 | 线性调频、事实上帮通用做MEMS |
| 博世 | 德国 | 1886 | 汽车零部件行业T1的老大 | MEMS |
| 先锋 | 日本 | 1938 | 日本知名消费电子产品企业 | MEMS |
供应商A:北醒
https://www.benewake.com/
1、产品能力
(1)选型手册
北醒企业宣传册.pdf
(2)主推型号1:Horn-X2长距高清3D激光雷达
对应的产品详情介绍

北醒 Horn-X2 Pro 是一款集高性能、高安全性、高可靠性为一体的三维激光雷达,可适用于车路协同
(V2X)、智慧机场、智慧铁路和智慧航运等多种大交通应用场景。该激光雷达拥有高垂直角分辨率,
可生成最高 600 线束高密度点云,轻松感知周围环境。得益于先进的设计,Horn-X2 Pro 激光雷达可
有效地抵抗强环境光的干扰,在恶劣的天气条件下也可稳定工作。Horn-X2 Pro 支持多种工作模式,可
根据客户需求定制产品的性能参数,以此精准匹配客户的各种复杂需求。
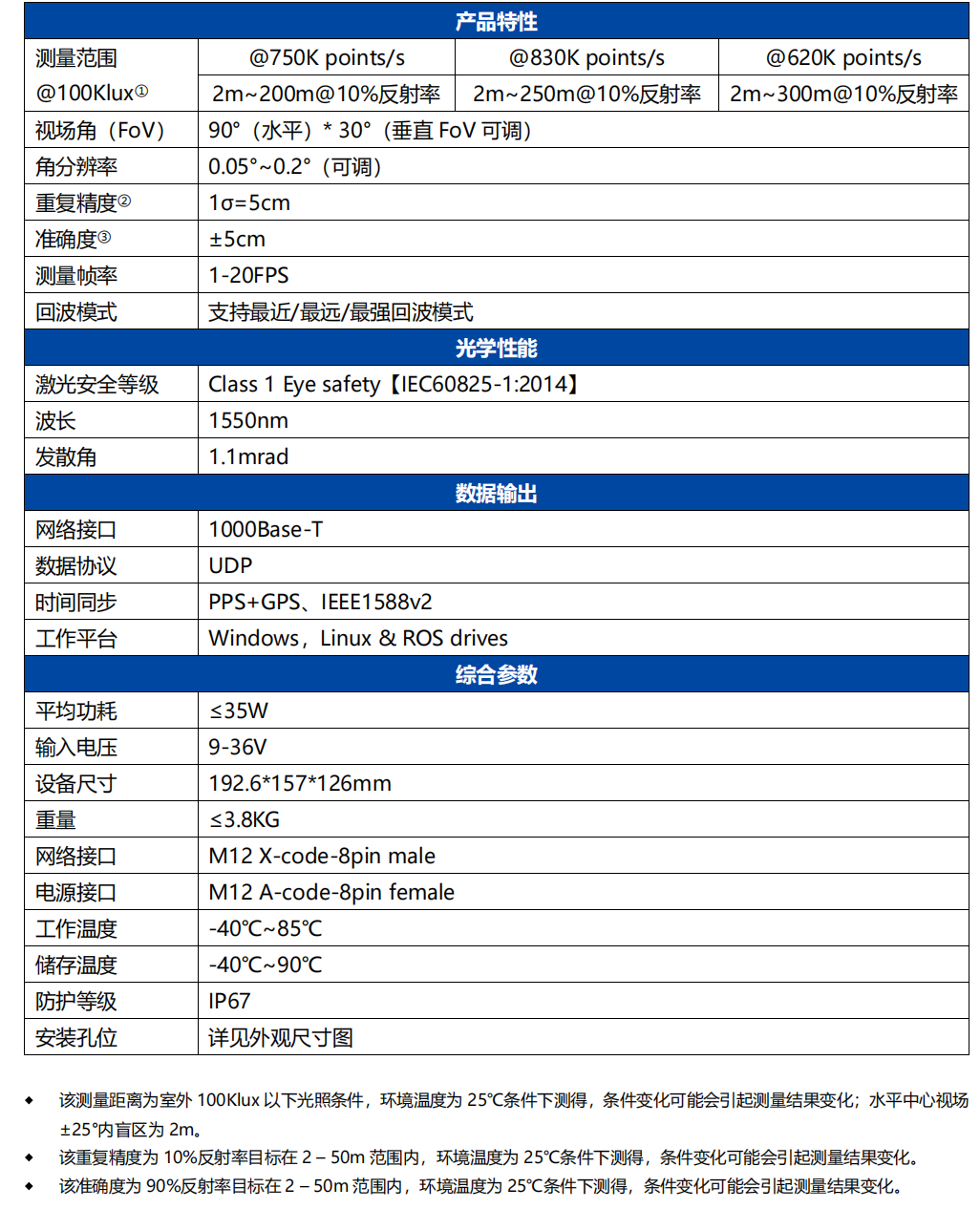
参数
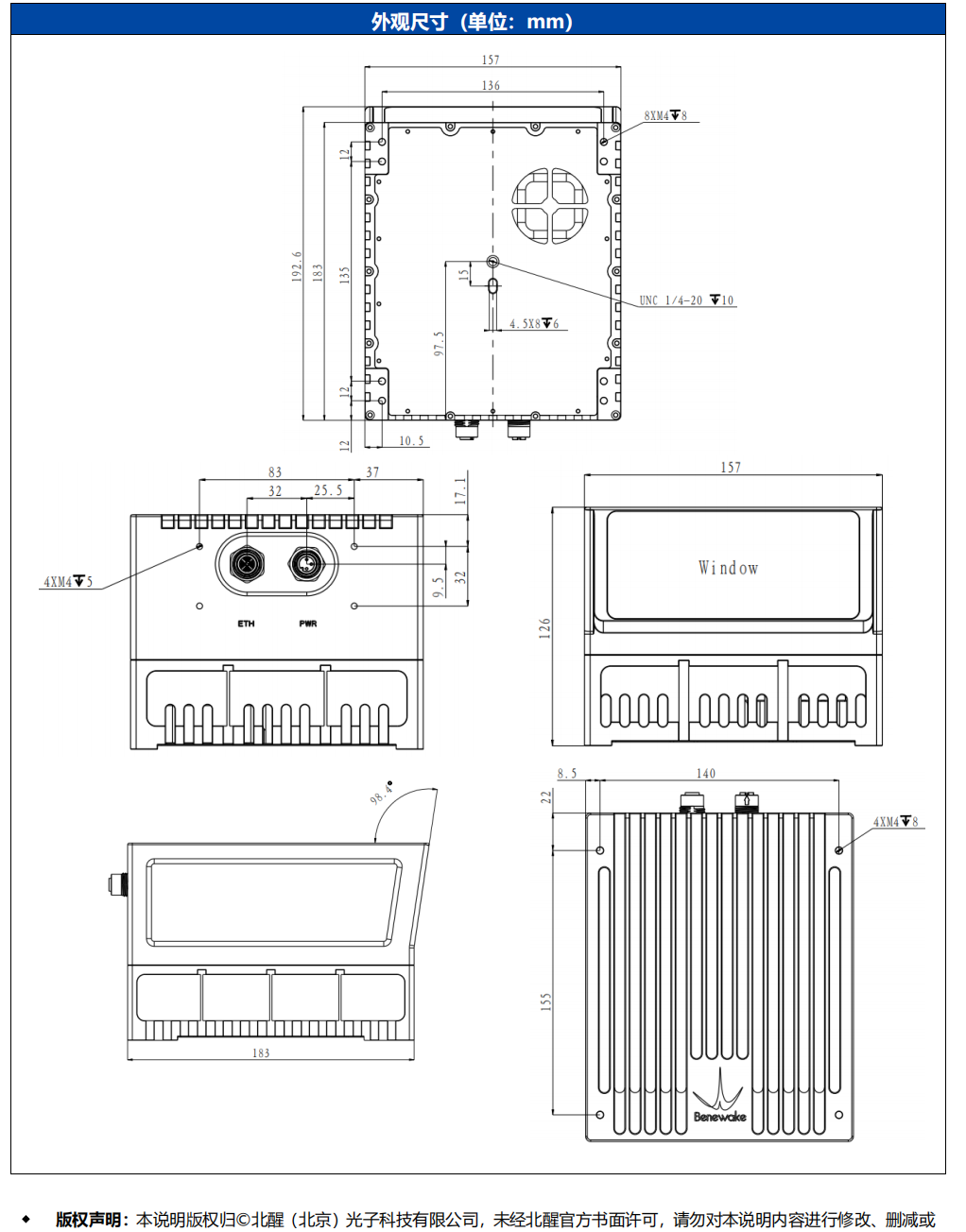
尺寸外观
2、支撑
(1)技术产品
技术资料
Horn-X2 Pro规格书.pdf
本文章源自奇迹物联开源的物联网应用知识库Cellular IoT Wiki,更多技术干货欢迎关注收藏Wiki:Cellular IoT Wiki 知识库(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
欢迎同学们走进AmazIOT知识库的世界!
这里是为物联网人构建的技术应用百科,以便帮助你更快更简单的开发物联网产品。
Cellular IoT Wiki初心:
在我们长期投身于蜂窝物联网 ODM/OEM 解决方案的实践过程中,一直被物联网技术碎片化与产业资源碎片化的问题所困扰。从产品定义、芯片选型,到软硬件研发和测试,物联网技术的碎片化以及产业资源的碎片化,始终对团队的产品开发交付质量和效率形成制约。为了减少因物联网碎片化而带来的重复开发工作,我们着手对物联网开发中高频应用的技术知识进行沉淀管理,并基于 Bloom OS 搭建了不同平台的 RTOS 应用生态。后来我们发现,很多物联网产品开发团队都面临着相似的困扰,于是,我们决定向全体物联网行业开发者开放奇迹物联内部沉淀的应用技术知识库 Wiki,期望能为更多物联网产品开发者减轻一些重复造轮子的负担。
Cellular IoT Wiki沉淀的技术内容方向如下:
奇迹物联的业务服务范围:基于自研的NB-IoT、Cat1、Cat4等物联网模组,为客户物联网ODM/OEM解决方案服务。我们的研发技术中心在石家庄,PCBA生产基地分布在深圳、石家庄、北京三个工厂,满足不同区域&不同量产规模&不同产品开发阶段的生产制造任务。跟传统PCBA工厂最大的区别是我们只服务物联网行业客户。
连接我们,和10000+物联网开发者一起 降低技术和成本门槛
让蜂窝物联网应用更简单~~
哈哈你终于滑到最重要的模块了,
千万不!要!划!走!忍住冲动!~
欢迎加入飞书“开源技术交流群”,随时找到我们哦~
点击链接如何加入奇迹物联技术话题群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以获取加入技术话题群攻略
Hey 物联网从业者,
你是否有了解过奇迹物联的官方公众号“eSIM物联工场”呢?
这里是奇迹物联的物联网应用技术开源wiki主阵地,欢迎关注公众号,不迷路~
及时获得最新物联网应用技术沉淀发布
(如有侵权,联系删除)
审核编辑 黄宇
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2488
-
谈一谈自动驾驶的激光雷达2021-06-17 13471
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 3194
-
自动驾驶的“眼睛”激光雷达2020-07-28 1273
-
从光电技术角度解析自动驾驶激光雷达2018-09-10 6312
-
北醒固态激光雷达,欢迎坛友看看2018-01-26 7960
-
北醒固态设计激光雷达2018-01-25 5892
-
固态激光雷达2018-01-04 5365
-
消费级激光雷达的起航2017-12-07 7512
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 6932
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 5358
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 5540
全部0条评论

快来发表一下你的评论吧 !
