

无人机控制系统原理
军用/航空电子
描述
无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
无人机技术特点:
实现高分辨率影像的采集
无人机可实现高分辨率影像的采集,在弥补卫星遥感经常因云层遮挡获取不到影像缺点的同时,解决了传统卫星遥感重访周期过长,应急不及时等问题。
无人战斗机
无人机系统由飞机平台系统、信息采集系统和地面控制系统组成。最初的一代主要以侦察机为大宗,一些无人机已经装备了武器(例如RQ-1捕食者装备AGM-114地狱火空对地导弹)。由无人机担任更多角色的军事预想,最初是轰炸和对地攻击,空对空战斗,飞行员最后一块领域。 装备有武器的无人机被称为无人战斗机飞机(UCAV)。
发射和回收
新一代的无人机能从多种平台上发射和回收,例如从地面车辆、舰船、航空器、亚轨道飞行器和卫星进行发射和回收。地面操纵员可以通过计算机检验它的程序并根据需要改变无人机的航向。而其他一些更先进的技术装备、如高级窃听装置、穿透树叶的雷达、提供化学能力的微型分光计设备等,也将被安装到无人机上。
无人机工作流程:
(1)开始界面:快捷实现任务的规划,进入任务监控界面,实现航拍任务的快速自动归档,各功能划分开来,实现软件运行的专一而稳定。
(2)航前检查:为保证任务的安全进行,起飞前结合飞行控制软件进行自动检测,确保飞机的GPS、罗盘、空速管及其俯仰翻滚等状态良好,避免在航拍中危险情况的发生。
(3)飞行任务规划:在区域空照、导航、混合三种模式下进行飞行任务的规划。
(4)航飞监控:实时掌握飞机的姿态、方位、空速、位置、电池电压、即时风速风向、任务时间等重要状态,便于操作人员实时判断任务的可执行性,进一步保证任务的安全。
(5)影像拼接:航拍任务完成后,导航航拍影像进行研究区域的影像拼接。
无人机优点:
成本低,效费比好;无人员伤亡风险;生存能力强,机动性能好,使用方便,在现代战争中有极其重要的作用,在民用领域更有广阔的前景。
无人机应用:
无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
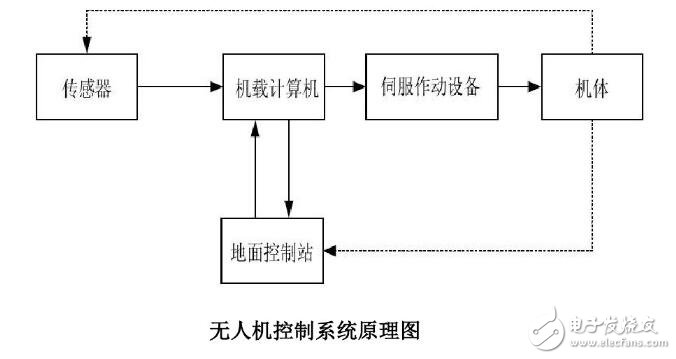
无人机控制原理:
无人机的飞行控制系统主要包括传感器、机载计算机和伺服作动设备三部分,其功能有:
1) 无人机姿态稳定与控制;
2) 无人机导航与航迹控制;
3) 无人机起飞和着陆控制;
4) 无人机任务设备管理与控制等。
- 相关推荐
- 热点推荐
- 无人机
-
嵌入式无人机控制系统硬件电路 —电路图天天读(146)2015-04-21 4951
-
基于嵌入式的无人机控制系统硬件电路设计2014-11-27 4403
-
【HarmonyOS HiSpark Wi-Fi IoT HarmonyOS 智能家居套件试用 】鸿蒙系统无人机控制系统2020-09-25 544
-
怎样去设计一种基于STM32F407四旋翼无人机控制系统2021-07-28 1829
-
无人机控制系统原理是什么?2021-11-08 2981
-
XX系列无人机自主安控系统可靠性设计2009-06-17 743
-
一种四旋翼无人机控制系统的设计与实现研究2016-09-27 1335
-
基于ATmegal28的无人机控制系统硬件设计2017-09-25 1040
-
无人机控制系统的的DSP源代码(基于2812的)2018-02-05 870
-
加拿大公司推出新的多域多平台无人机控制系统2019-06-21 4063
-
新研制的全息无人机控制系统,飞行所需数据量将减少六倍2020-08-13 993
-
ArduPilot Mega(APM)无人机控制系统2022-04-14 2279
-
无人机的陀螺仪是什么作用 无人机控制系统原理2023-07-21 9587
-
微美全息(NASDAQ:WIMI)开发基于神经网络的无人机控制系统引领技术革新2024-01-03 1183
-
低空经济的第一助推力,基于鸿道Intewell操作系统的无人机控制系统2024-12-06 1053
全部0条评论

快来发表一下你的评论吧 !
