

FAST特征点检测features2D
3G技术应用
描述
特征点检测和匹配是计算机视觉中一个很有用的技术。在物体检测,视觉跟踪,三维常年关键等领域都有很广泛的应用。这一次先介绍特征点检测的一种方法——FAST(features from accelerated segment test)。很多传统的算法都很耗时,而且特征点检测算法只是很多复杂图像处理里中的第一步,得不偿失。FAST特征点检测是公认的比较快速的特征点检测方法,只利用周围像素比较的信息就可以得到特征点,简单,有效。
FAST特征检测算法来源于corner的定义,这个定义基于特征点周围的图像灰度值,检测候选特征点周围一圈的像素值,如果候选点周围领域内有足够多的像素点与该候选点的灰度值差别够大,则认为该候选点为一个特征点。

其中I(x)为圆周上任意一点的灰度,I(p)为圆心的灰度,Ed为灰度值差得阈值,如果N大于给定阈值,一般为周围圆圈点的四分之三,则认为p是一个特征点。
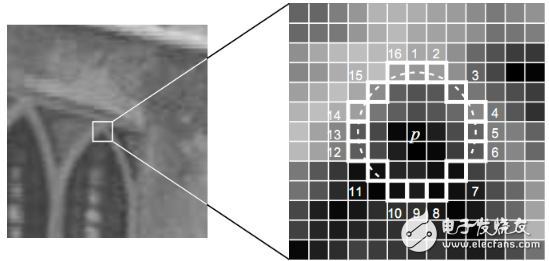
为了获得更快的结果,还采用了额外的加速办法。如果测试了候选点周围每隔90度角的4个点,应该至少有3个和候选点的灰度值差足够大,否则则不用再计算其他点,直接认为该候选点不是特征点。候选点周围的圆的选取半径是一个很重要的参数,这里我为了简单高效,采用半径为3,共有16个周边像素需要比较。为了提高比较的效率,通常只使用N个周边像素来比较,也就是大家经常说的FAST-N。我看很多文献推荐FAST-9,作者的主页上有FAST-9、FAST-10、FAST-11、FAST-12,大家使用比较多的是FAST-9和FAST-12。上个图说明的更形象一些
OpenCV里对FAST的使用也非常简单,先声明一组特征点,构建FAST特征检测,接下来调用detect函数检测图像中的特征点,最后把特征点绘制到图片上。上代码说的清楚些
#include 《opencv2/core/core.hpp》
#include 《opencv2/features2d/features2d.hpp》
#include 《opencv2/highgui/highgui.hpp》
#include 《vector》
using namespace cv;
void main()
{
Mat image;
image = imread(“church01.jpg”);
// vector of keyPoints
std::vector《KeyPoint》 keyPoints;
// construction of the fast feature detector object
FastFeatureDetector fast(40); // 检测的阈值为40
// feature point detection
fast.detect(image,keyPoints);
drawKeypoints(image, keyPoints, image, Scalar::all(255), DrawMatchesFlags::DRAW_OVER_OUTIMG);
imshow(“FAST feature”, image);
cvWaitKey(0);
}
1、上图所示,一个以像素p为中心,半径为3的圆上,有16个像素点(p1、p2、…、p16)。
2、定义一个阈值。计算p1、p9与中心p的像素差,若它们绝对值都小于阈值,则p点不可能是特征点,直接pass掉;否则,当做候选点,有待进一步考察;
3、若p是候选点,则计算p1、p9、p5、p13与中心p的像素差,若它们的绝对值有至少3个超过阈值,则当做候选点,再进行下一步考察;否则,直接pass掉;
4、若p是候选点,则计算p1到p16这16个点与中心p的像素差,若它们有至少9个超过阈值,则是特征点;否则,直接pass掉。
5、对图像进行非极大值抑制:计算特征点出的FAST得分值(即score值,也即s值),判断以特征点p为中心的一个邻域(如3x3或5x5)内,计算若有多个特征点,则判断每个特征点的s值(16个点与中心差值的绝对值总和),若p是邻域所有特征点中响应值最大的,则保留;否则,抑制。若邻域内只有一个特征点(角点),则保留。得分计算公式如下(公式中用V表示得分,t表示阈值):

上面是FAST-9,当然FAST-10、FAST-11、FAST-12也是一样的,只是步骤4中,超过阈值的个数不一样。FAST算法实现起来简单,尤其是以速度快著称。
以上便是FAST特征检测的过程,清晰明了,而对于角点的定义也是做到了返璞归真,大师就是大师,还原本质的能力很强,估计以前这种简单想法被很多人忽略了
- 相关推荐
- 热点推荐
- fast
-
机器视觉图像处理之角点检测技术2016-01-22 4425
-
《OpenCV3编程入门》角点检测之Shi-Tomasi角点检测2020-05-25 937
-
Firefly RK3399Pro开源主板 + 单目摄像头,人体特征点检测方案2022-04-01 2744
-
一种基于轮廓分析的图像特征点检测方法2009-12-14 930
-
多芯电缆断线点检测电路2009-03-01 2155
-
基于FPGA的语音端点检测2011-03-17 3700
-
Harris角点检测2016-06-06 597
-
FAST特征选择算法的改进2017-12-30 1555
-
firefly人体特征点检测介绍2019-11-05 2514
-
图像特征点检测方法的原理解析2020-08-31 8287
-
基于Laplace-Beltrami算子的特征点检测算法2021-04-21 1279
-
基于高斯金字塔图像的改进Harris特征点检测算法2021-05-06 1217
-
基于特征切分和随机森林的异常点检测模型2021-05-13 910
-
基于MFCC的多维特征语音信号端点检测算法2021-06-03 1173
-
DCNN网络结构 DCNN的人脸特征点检测2023-07-20 719
全部0条评论

快来发表一下你的评论吧 !
