

什么是拖动示教?机器人拖动示教方式分析
描述
随着拖动示教在协作机器人、并联机器人上的应用,将调试技术趋向快速、简便的方向发展,满足生产企业应用机器人进行及时、高效的生产需求,以及在工业4.0和“中国制造 2025”的背景下,适应现代工业快速多变的特点,满足制造业日益增长的复杂性要求。
机器人拖动示教,就是操作员可以直接拖着机器人各关节,运动到理想的姿态,记录下来。协作机器人是较早具有该功能的系统。这种示教方式可以避免传统示教的各种缺点,是机器人中一项很有应用前景的技术。
目前拖动示教可以分为两大方向:增加传感器类和运用物理学公式类
传感器类:是在机器人关节处安装力矩传感器,配合控制器中的算法,操作者牵引机器人末端执行器做线性或者旋转的运动,检测出用户施加在该处的外力信息的拖动示教。这种方法虽然实现起来较为简单,但需要额外配置力矩传感器,增加了机器人的示教成本,并且由于手动强行拖拽,使得机器人的运动显得十分僵硬,想要获取特定点还需要传统的遥控示教盒的辅助。
(1)末端力矩传感器类
通过在机器人末端安装六维力矩传感器, 控制器可检测出用户施加在该处的外力信息(FX,FY,FZ,TX,TY,TZ),再结合阻抗/导纳控制,即可实现机器人的拖动示教。
这种方式实现起来较为简单,然而质量不好的力传感器零点容易漂,会有安全隐患,而质量稍微好点的力传感器价格贵的要死,甚至比机器人本体还贵。而且,它只支持在传感器安装处的拖动示教,实现方式不灵活。笔者在今年的机器人展上体验过新时达的该类机器人, 拖动中会感觉会偶尔出现跳变,估计是传感器标定等相关的问题造成的。
(2)关节力矩传感器类
这种方式的机器人本体结构的特点是在关节处需安装力矩传感器和双编码器, 组成柔性关节或线弹性驱动器(serial elastic joint)。减速器一般采用刚度较低的谐波减速器。
传统的工业机器人为了提高位置追踪精度,系统的刚度往往是越大越好。而这类机器人通过降低关节刚度,达到提高力矩检测和控制的灵敏度的目的。由于关节刚度较低,电机与连杆端的角度不一样,因此需要在连杆端(力矩传感器输出) 再加一个编码器。目前市面上典型产品有 Kuka 公司与德国宇航局共同研发的几款轻型机械臂和Rethink robotics。
这种结构的优势是可以精确对系统建模, 提高力矩检测和控制精度,拖动示教也会更轻松更柔顺。然而, 过高的结构复杂度和成本导致这些机器人的市场接受度较低。
物理学公式类:这种方式不需要在机器人本体上加其余力矩传感器,优势是成本低,结构简单,但手感会比上一种稍微差点。这种方式是目前拖动示教的主流方案, 这种类型的拖动示教,机器人驱动器工作在电流/力矩模式。
(1)开环力控
是更为直接的机器人拖动示教方法,基于力矩控制的零力平衡,即借助机器人的动力学模型,控制器可以实时的算出机器人被拖动时所需要的力矩,然后把提供该力矩给电机使得机器人能够很好地辅助操作人员进行拖动。
通过逆动力学算得的电机所需要的力矩,其计算公式包括惯性力项、科里奥利力 和离心力项、重力项以及摩擦力项。而当中的根据选择的摩擦力模型可以分解为粘性摩擦力项、库仑摩擦力项以及补偿。
不同于传统阻抗的拖动示教方法,零力控制方法在示教时依靠精确的动力学模型,拖动机器人的摩擦力以及惯性力都的到了相应的电机力矩的抵消,使得机器人能够轻松的拖动,对操作者更友好。同时算法也保证了当外力被撤销时,机器人能够迅速的静止在当前位置,确保了设备和操作人员的安全。
零力控制拖动示教的另一个优势是,在动力学模型中,各关节的力矩是可以单独控制的,所以机器人的拖动点不再被固定在末端执行器上,操作者可以在机器人任意位置去拖动机器人,使操作更加灵活多变。
(2)闭环力控
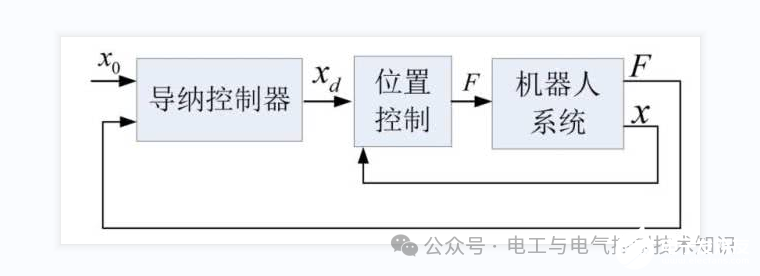
闭环力控会存在如下一个力反馈回路,它通过算法估计出用户的牵引力矩, 再通过阻抗控制,让电机输出一个辅助力矩,帮助用户拖动机器人,完成示教工作。由于反馈回路的存在,它对机器人建模和系统辨识的精度要求较低。
闭环力控的另一大优势是它通过算法改变了机器人的整体动力学特性,可降低机器人与环境交互中的阻抗特性,这也是提出闭环力控的一个初衷。这项技术可在一些对接触力要求较低场合,取代力矩传感器的作用,比如可以用来做柔性装配等。
-
拖动示教喷涂设备有哪些部件组成?2025-05-12 1316
-
智能拖动示教喷涂机器人:技术革新与未来展望2024-12-12 1744
-
三分钟让你明白拖动示教喷涂机器移动速度是多少2024-11-20 1731
-
协作机器人拽拖示教详解2024-10-23 2104
-
焊接机器人示教模式怎么设置2024-09-09 1888
-
基于导纳控制的机器人拖动示教原理和实现步骤2023-12-04 8887
-
ARM工业平板在机器人示教器控制系统的应用2022-09-08 2793
-
基于深度学习的机器人示教系统设计与实现2021-06-30 1373
-
拖动示教喷涂机器人的应用将比人工喷涂更具有优势2020-08-11 2238
-
拖动示教测试在并联机器人应用领域实现零突破2018-12-07 1872
-
没有示教器,还能控制机器人吗?2018-05-30 12512
-
面向ABB IRB4600机器人的虚拟示教系统研究2018-02-26 1525
-
码垛机器人示教器的设计与实现_朱琳2017-01-18 1221
全部0条评论

快来发表一下你的评论吧 !
