

基于ARM的无线数字视频传输系统应用
控制/MCU
1936人已加入
描述
引言
微型无人侦察机的首要任务是实现图像信息的实时获取与无线传输。研究较成熟的无人机载图像实时传输系统,其图像质量指标、信道编码效率等均不高,且抗多径干扰差。同时,由于微小型飞行器的载重及能量供给非常有限,对机载部分的功耗、重量、安装尺寸等都提出了更为严格的要求。因此,开发适用于微型飞行器的微小摄像与无线传输系统尤为重要。本文所研究的主要内容以某微型无人侦察机的需求为背景,提出了一种视频图像的无线数字传输方式,该系统具有体积小、功耗低、实时性好及传输可靠等特点。
本文设计的基于ARM的嵌入式微小型无人机无线数字视频传输系统,包括硬件设计和Linux下的软件设计。该系统在MCU4010嵌入式微处理器的协调和调度下统一工作,采甩专用MPEG-4音视频编码芯片MPG-440A将采集生成的数字视频予以编码压缩处理。
1 系统原理
微型无人机要求提供实时、高质量的侦察图像。本文所采用的摄像与无线传输系统组成框图如图1所示,主要由图像传感器、视频压缩编码芯片、微处理芯片、FLASH芯片和SDRAM内存以及无线网卡等组成。
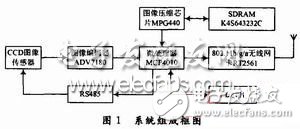
由于受微型无人机的载荷所限,该系统首先选用重量较轻的高分辨率模拟摄像机采集视频信号,然后利用图像编码器将采集到的模拟图像,转化生成分辨率较高的数字图像。编码后的数字图像数据量巨大,且无线通信信道的带宽有限,难以保证视频图像的实时传输,因此需要对数字视频图像进行编码压缩,在保证一定画质的前提下尽可能减少数据量。压缩工作通常可以选用软件或专用硬件来完成。然而专用编码压缩软件代码规模较大,设备要求高,且机载微处理器功能有限,使其应用受到限制。为保证系统最优功能状态,选用MPEG-4专用编码芯片对采集后得到的数字图像进行硬件编码压缩,生成MPEG-4码流,实时性好,可靠性高。模块工作和码流流向由ARM微处理器调度管理,同时,微处理器通过RS 485和摄像模块相连,传输摄像机镜头的控制信号,如变倍、变焦等。机载云台也通过RS485获得用户的远程控制信号,并通过水平和垂直方向的位置改变来响应用户的不同偾察需求。在完成数字视频侦察系统的开发后,为系统加入了基于开放的802.11协议的无线加密传输模块,为系统的安全工作带来保证,避免了无线视频系统的安全漏洞。
2 硬件设计
微型无人机视频处理与传输系统主要包括视频采集及处理模块、无线数据传输模块2个子系统,是整个微型无人机视频系统中的核心部分。
本文视频编码器采用的编码器是ADI公司的ADV7180,它是ADI首次发表的低价格低消耗功率但提供高质量影像输出的影像编码器。在它的输入前端有阶梯状滤波器,不用为系统添加额外的滤波器。同时,ADV7180还提供了DNR/CTI的影像强化输出调整,ADLLT更独步全球提供给系统在弱信号的处理上强有力的支持,使传输的图像更加平稳。拥有智能型影像处理器的ADV7180在控制上也更为简化,只需设定少数的暂存器就可输出高质量影像,无需为影像编码器设定繁琐复杂的程序。
视频压缩芯片采用的是Imagia公司的MPG-440A,如图2所示,它是针对网络视频传输所设计的MPEG-4专属芯片。MPG-440A支持高阶影像数字监控功能,包含D1分辨率、防伪水印、动态调整IP帧比率与动态调整质量,是特殊场合监控用的最佳影像处理器,可产生最小比特率并符合长时间储存要求。
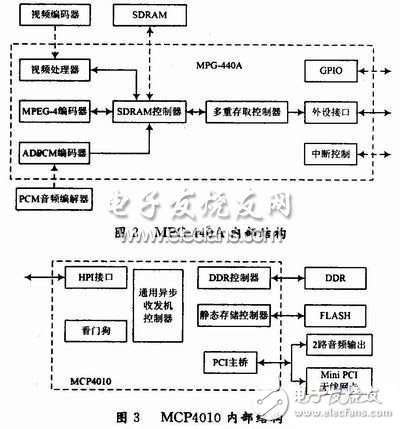
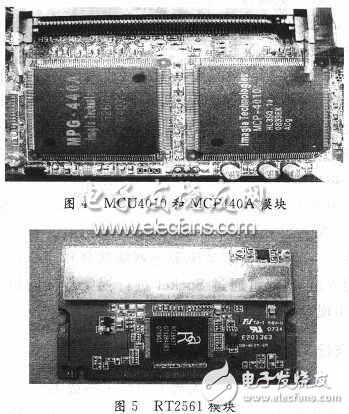
主控芯片选取的是Imagia公司的MCP4010-32位RISC嵌入式微处理器,见图3。它使用.ARM 922 T核,工作频率高达200 MHz,内部带有存储器管理单元(MMU),具有高性能、低功耗、接口丰富和体积小等优良特性,是视频采集和处理模块的核心,可达到D1分辨率实时编码压缩的效能。
无线传输模块采用Ralink公司提供的RT2561芯片方案的无线网卡,符合IEEE 802.11b/g/n标准,传输速率高达128 Mb/s(自适应)。支持标准32位Mini-PCI接口;具有MIMO天线技术,使传输更稳定距离更广;支持Windows/Linux/WinCE等操作系统;工作频率范围为2.412~2.484 GHz;传输功率为18 dBm(典型值)。MCU4010和MCP440A如图4所示,RT2561如图5所示。
地面站采用便携式设计,主要用来接收无人机实时发送回的视频信号,并将其显示出来,包括接收天线、笔记本计算机或PDA。该系统采用的接收天线为TDJ-2400BKC-Y室外板状定向天线,其具有增益高、前后辐射比大、三维尺寸小、结构紧凑等优点,是一种高质量的室外通信天线,非常符合无人机在野外条件下的战术需求。其频率范围为2 400~2 483 MHz,增益为10 dBi,水平面波瓣宽度为110°。
3 软件设计
该设计采用基于Web服务器的B/S(Browser/Server)服务机制,B/S服务机制是随着Internet技术的兴起,对C/S(Client/Server)服务机制的改进,由于其先进的开发技术、优越的可管理性和可维护性及简单方便的应用模式,正成为视频监控系统最流行的应用方式。它能将地面站的视频侦察系统控制、侦察视频浏览、开关量的控制、摄像云台控制等在IE浏览器中予以实现,不用另行安装软件,使视频侦察系统的操作、配制简单化,实现了跨平台性,客户端在普通PC机、PDA等操作系统上均能运行,非常适合战术无人机的野外作业。下面分别介绍本系统服务器端和客户端的主要功能:
(1)服务器端主要功能:响应Web连接服务,采集视频数据,通过网络传输数据。
(2)机载微处理器作为服务器,响应客户端的连接请求,并提供ActiveX控件的下载,利用Linux视频子系统提供的API函数编写数据采集代码,接收MPG-440A传送的MPEG-4格式二进制视频数据。将接收到的数据整理后,通过Socket通讯以组播方式通过网络发送到浏览器客户端。
(3)客户端部分的主要功能:连接机载Web服务器并下载ActiveX控件。
(4)为了减轻视频服务器客户端操作的负担,提高软件升级和维护的方便性,设计中将地面站的视频图像接收和视频图像显示部分封装在ActiveX控件中,在运行Linux的ARM串台上移植嵌入式Web服务器Boa,响应地面站的连接请求,并将ActiveX控件嵌入到网页中发布。地面站通过浏览器访问Web服务器时,ActiveX控件就会经过网页传输到客户端并自动下载安装。一旦视频侦察系统服务器端部分和ActiveX控件建立通信,就可通过Socket进行视频数据的组播传输,实现远程实时监控。
4 飞行实验
该系统在某战术无人机上进行了搭载飞行试验,飞行高度约为200 m,摄像镜头的视角45°,平均飞行速度约为15 m/s。发射模块将摄像头拍摄到的数字视频信号实时发送回地面,通过浏览器显示的视频截图如图6所示。机载飞行试验表明,在3 km范围内,机载摄像与无线传输系统能较好地完成MAV摄像和传输任务,该系统尺寸小、重量轻、功耗低、工作稳定,满足MAV有效载荷的基本要求。但由于无人机本身的重量轻,惯性很小,在低速飞行状态时,气流扰动和机体本身的振动对摄像和传输的质量有影响,还需适当采取减振措施,减少图像在传输过程中产生的抖动。

5 结语
本文设计的基于ARM的嵌入式微小型无人机无线数字视频传输系统稳定可靠,成本低,采用B/S结构设计,以组播方式传输,节省系统资源,易于维护,升级方便,使用简单。通过机载实验证明该系统基本满足微小型无人机的要求,能够做到实时传输回无人机侦察范围内的视频图像。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
-
无线视频传输平台的搭建步骤2019-07-17 1500
-
基于VideoMASTER和PXI的无线HDMIMIMO数字视频测试系统2019-06-05 2038
-
基于STM32的无线视频传输系统2018-03-12 10411
-
无线视频传输系统的方案设计与结果分析2017-12-12 2620
-
【DNA Kit申请】低功耗宽带无线视频传输2015-09-29 1900
-
ARM的无线视频传输系统原理图【符合】2015-03-26 6942
-
无线视频传输2012-08-24 12552
-
基于ARM的无线数字视频传输系统应用2011-09-08 2505
-
数字视频无线移动监控传输解决方案2011-07-27 929
-
基于ARM的无线视频传输系统2011-05-30 1183
-
同轴视频传输技术的工作原理和应用2011-02-14 6231
-
LVDS技术在数字视频传输系统中的应用2010-07-21 1368
-
基于ADSP-BF537的无线视频传输方案2009-07-06 1506
-
基于ARM-Linux的无线音视频传输系统2009-06-25 938
全部0条评论

快来发表一下你的评论吧 !
