

能实现连续可调移相的高频模数结合移相电路设计
模拟技术
描述
高频感应加热设备,因容性工作状态时存在开关管硬开通、开关损耗大以及反并联的二极管有反向恢复等问题,严重时会损坏开关管,故逆变主电路通常工作在弱感性状态,即使输出电压的相位略超前于输出电流的相位。而且,反馈回路的各个芯片,在脉冲到来时都有一定的响应时间,使驱动芯片输出信号的相位必定滞后于采样信号的相位,因此必须在反馈回路中进行相位的超前、滞后调节,实现移相功能。
传统的移相方法是采用如RC或LC的模拟电路进行相位调节。这种移相电路是利用电阻两端的电压与输入电压同相位,而电容两端电压滞后于输入电压90°相位,电感两端电压超前输入电压90°相位的特性,通过选择不同的RC或LC值实现所需角度的相位超前、滞后调节。但电路中由于存在L、C等元件,其等效阻抗与输入信号的频率有关,移相角会随输入信号频率的变化而变化,故其仅适用于输入信号频率不变或频率变化时移相精度要求不高的场合。而纯数字电路若要使1 MHz频率产生如1°左右相移时,必须先把输入信号频率通过锁相倍频电路把频率放大360倍,这就要求锁相环必须既可输入1 MHz左右的信号也能输出360 MHz以上的信号,能满足这种要求的锁相环芯片即使存在也会由于价格太高不是很实用。
为此,有必要设计一种低成本的实时实用移相电路,使其移相角在频率变化时基本不变。文中就是基于这种需求,提出了两种移相精度较高的模数结合移相电路,经实验在1 MHz高频感应加热场合完全适用。
1 模数结合移相电路
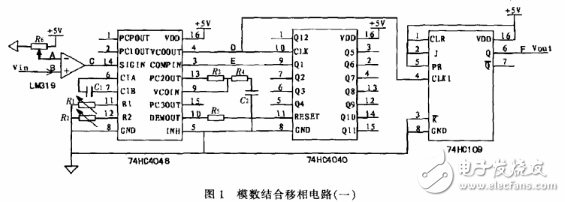
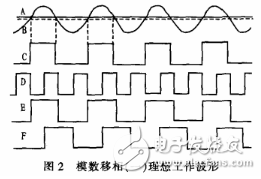
图1是一种由高速比较器、锁相倍频电路和J-K触发器构成的90°~180°连续可调模数结合移相电路。B处的信号是从串联逆变主电路电流采样放大后获得的,若与过零比较器比较,则输出占空比为0.5的方波信号。通过调节A处电平与B处0电平以上的正弦波上升沿脉冲比较,使C处输出方波上升沿滞后一个相角度,构成一个0°~90°连续可调的移相电路。若所需移相角小于90°,则无需后级的锁相倍频和J-K触发器构成的90°移相电路。74HC4046是由压控振荡器(VCO),相位比较器(PC1、PC2、PC3)的和外围的环路滤波器(LF)组成的锁相环,3脚和4脚输出信号占空比始终为0.5,与输入信号的占空比无关。图中R1、C1决定VCO的频率范围,电阻R2决定VCO的中心频率,如果R1、R2、C1选择合理,将简化外围LF的设计。为了减轻LF的负担,10脚解调器输出接高阻至地。LM319输出的占空比不超过0.5的数字信号经锁相环内部的自偏放大器,上升沿触发的频率和相位观测器PC2,R3、R4、C2构成的低通滤波器以及内部的VCO实现锁相,输出送给下降沿触发的可做分频器的74HC4040进行2分频,使74HC4040的9脚输出信号频率是10脚(也即锁相环4脚)输入信号频率的一半。由于锁相环3脚的信号来自74HC4040的9脚输出,分频器10脚的信号来自锁相环的4脚输出,因此,锁相环4脚输出频率是其14脚输入信号频率的2倍,实现锁相倍频功能。当锁相环3脚信号与14脚输入信号的频率和上升沿相位不一致时,内部电路会进行自动动态补偿调节,实现两者频率和相位的完全一致。然后,将锁相环4脚输出信号送入上升沿触发的J-K触发器74HC109,在时,时钟脉冲上升沿到来时状态翻转,下降沿到来时状态不变,而锁相倍频后D处信号的上升沿较锁相环14脚输入信号的上升和下降沿均滞后90°,实现90°移相的目的。上述分析的原理图中各点的理想工作波形如图2所示。
若要实现180°~360°的移相,只需在整个移相电路后接一个反相器。若要实现90°~135°连续可调移相,只需将图1中74HC4040接9脚的2分频改成接7脚的4分频,在输出端F的后面再接一级上升沿触发的2分频电路。若要实现90°~90°以上更小范围内的移相,只需将图1中74HC4046换成NE564或其他更高频率的锁相芯片,74HC4040的9脚改接成相应的分频引脚,并在上述电路的输出端F的后再接级上升沿触发的分频电路即可,这里不再一一赘述。
2 模数结合移相电路
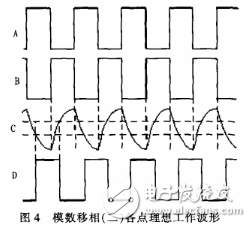
图3所示电路是一种输入信号占空比为0.5的移相效果较好的移相角在0°~180°范围内连续可调的模数结合移相电路。前级的74HC14作反相器用,起缓冲保护并起到使移相电路输入、输出同相的目的,由于高速反相器74HC14电平转换有一定的响应时间,故其B处电平转换时刻略滞后于A处的电平转换时刻。中间的RC环节是将B处的数字信号转化成模拟信号。当B处的数字信号高电平到来时,B处的信号通过电阻R1对电容C1充电,直到B处高电平的末端;当B处的数字信号低电平到来时,电容C1通过电阻R1放电,直到B处低电平的末端。由于74HC14在5 V供电时阀值电压VT+=3.2 V、VT-=1.8 V,故后级74HC14做施密特触发器时,C处信号上升沿电平大于3.2 V时D处输出低电平,C处信号下降沿电平小于1.8 V时D处输出高电平,即在C处信号电平到达74HC14阀值电压时D处信号电平发生改变。改变电阻R1的值时电容C1充放电速度发生变化,其波形与反相器U1B阈值电压的交点也发生变化,整个移相电路的移相角(A处方波上升沿与D处方波上升沿的相位差)随之发生变化。实际中,由于高速反相器74HC14脉冲到来时有微小的响应时间,故移相角不可能为0°。若要实现180°~360°范围内的移相,由于高频感应加热电源一般都有频率跟踪环节,故只需在频率跟踪电路的输出端后面加一级反相器即可。若要实现移相角在0°~180°内任意更小角度如0°~120°、0°~60°等的连续调节,可通过使输入信号的占空比与上述移相角对应来实现。图3中各点的理想工作波形如图4所示。
3 实验结果
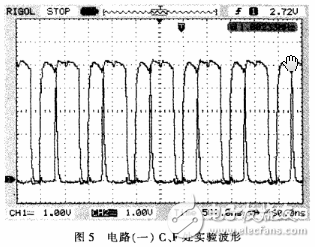
模数结合移相电路(一)实验波形如图5所示,图中占空比较小的为锁相环14脚输入波形,占空比较大的为其移相后的波形,由图可知,此移相电路有较好的移相效果。实际中,由于锁相环、74HC4040以及74HC109在脉冲到来时状态改变需有一定的响应时间,故锁相环3脚信号相位肯定了略滞后于14脚的相位,有一个微小的相移,此移相角在1MHz左右高频时引起的相移远小于电路使工作在感性状态所需的相移,故在1 MHz及以下高频场合可完全忽略。
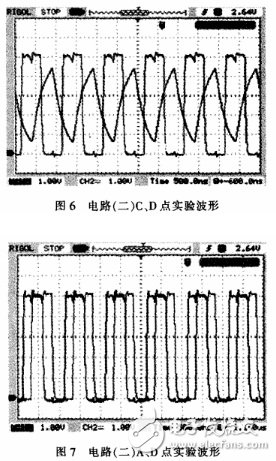
模数结合移相电路(二)C、D点实验波形和A、D点实验波形分别如图6、图7所示,与理论分析一致。实验还发现,当A处数字输入信号的频率变化时,移相电路本身引起的延迟误差恒为50 ns,不随输入信号频率的变化;而且输出是与输入信号占空比一致的信号,移相角的最大值是与输入信号占空比一一对应的,不随C值确定后R参数的变化而变化。
4 结论
从实验效果看,上述提出的两种模数结合移相电路,在1 MHz光伏电池片组件高频感应加热场合可根据需要连续可调移相角,移相效果好。模数移相电路(一)移相角几乎不随输入信号频率的变化而变化,只与锁相倍频电路的倍频次数有关,而且输出信号的占空比恒为0.5,与输入信号无关。模数移相电路(二)在要求移相角大于50 ns对应相角度的高频感应加热控制电路中有很好的移相效果。上述电路稍作修改,即可在频率小于1 MHz的高频场合实现任意需要角度范围内的连续可调移相,具有很好的实用价值。
-
信号处理电路-移相电路设计2023-10-13 15515
-
三、可调角度移相电路2022-12-16 3416
-
使用移相电路计算相位的方式2022-01-11 6085
-
阻容移相桥触发电路是如何实现移相的2021-08-19 3989
-
求一种采用数字控制的三相移相触发电路设计方案?2021-04-08 1888
-
如何使用移相电路计算相位2021-01-23 20456
-
移相电路设计 RC移相电路示意图2020-11-16 65376
-
帮忙设计一个移相电路!2017-08-09 6681
-
对0—360℃连续可调移相器的探讨2016-11-18 2345
-
RC移相式振荡电路为什么不能用高频2016-03-01 5129
-
高频感应加热电源模数结合连续可调移相电路研究2012-07-02 1539
-
相控变流器的垂直移相电路2010-04-26 695
-
三相全数字移相触发电路2009-04-23 1256
全部0条评论

快来发表一下你的评论吧 !
