

物联网行业中Nor Flash的软件设计分享_W25Q128的软件设计方案
电子说
描述
一 概述
W25Q128是一种NOR Flash芯片,掉电后数据不丢失的特点。
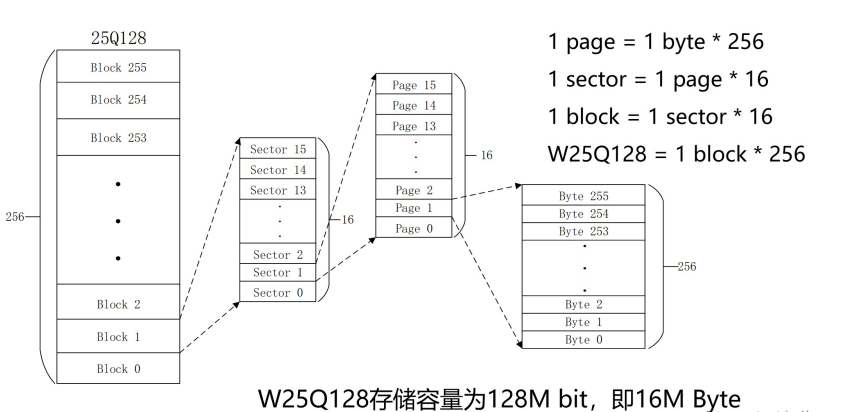
W25Q128FV阵列被组织成65,536个可编程页面,每个页面256字节。每次最多可编程256字节。可以以16页为一组(即一个Sector)、128页为一组(8个Sector)、256页为一组(16个Sector)或整个芯片(芯片擦除)进行擦除。W25Q128FV分别有4,096个可擦除扇区和256个可擦除块。较小的4KB扇区为需要数据和参数存储的应用程序提供了更大的灵活性。
标准SPI通信支持时钟频率高达104MHz,Dual SPI通信支持时钟频率高达208MHz,QSPI通信支持时钟频率高达416MHz。
注意:W25Q128一共为128M bits(16M Byte),又分为256个块(每个块512K bit(64K Byte)),每个块又分为16个扇区(每个扇区32K bit(4 KByte)),每个扇区又分为16页(每个页2K bit(256 Byte))
二 物理特性
可以将 1 写成 0,但是不能将 0 写成 1,要想将 0 写成 1,必须进行擦除操作。如果要改变数据,就需要先擦除后写数据。
如果想要修改小于扇区大小的数据,需要将整个扇区的数据,在内存中进行备份,然后修改内存中的数据,再将数据写回到原扇区位置。因此,驱动要达到支持自动完成这个过程,用户可以使用驱动修改任意位置的数据。
三 存储结构
W25Q128可以存储16777216字节,存储一个字节占用一个地址,所以寻址范围是0-(16777216-1),对应的16进制为0-0xFFFFFF(所以寄存器地址是24位的)
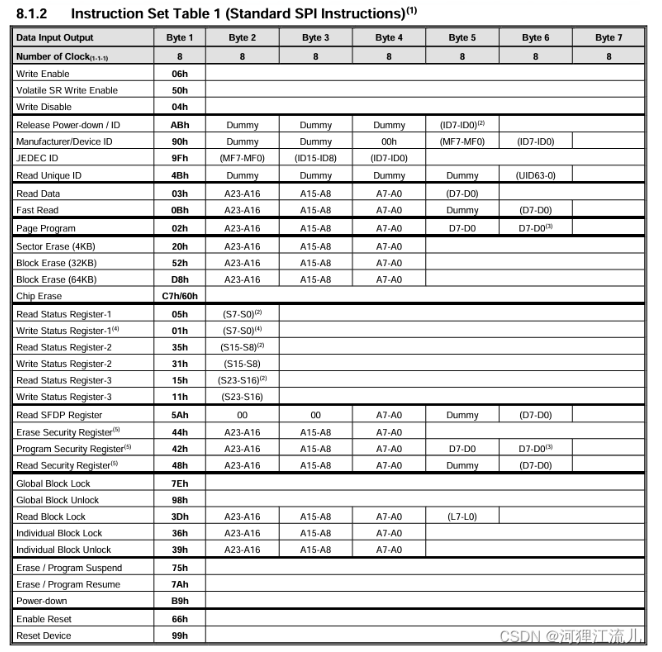
四 命令总览
五 组件的使用
1 Gitee链接地址
Demo位于amaziot_bloom_os_sdksample3rd2.1_W25Q128
Gitee源码地址:https://gitee.com/ning./hongdou
Github源码地址:https://github.com/ayumid/hongdou
编译指令:.build.bat -l .amaziot_bloom_os_sdksample3rd2.1_W25Q128
2 组件功能介绍
实现软件模拟SPI,驱动W25Q128芯片,实现数据存储。
3 代码讲解
1 drv_w25q128_delay_us
功能:该函数用于,延时。
参数:
| 参数 | 释义 |
| count | 死循环次数 |
返回值:无
示例:
//初始化i2c总线 ret = drv_xl9535_i2c_init();
2 drv_w25q128_gpio_set
功能:该函数用于,模拟SPI设置IO输出电平。
参数:
| 参数 | 释义 |
| num | 引脚号 |
| val | 0 低电平,1 高电平 |
返回值:0 成功,-1 失败
示例:
drv_w25q128_gpio_set(DRV_w25q128_SPI_CS, DRV_w25q128_GPIO_LOW);
3 drv_w25q128_byte_wr
功能:该函数用于,SPI写读一个字节 mode3。
参数:
| 参数 | 释义 |
| byte | 发送数据 |
返回值:flash返回数据
示例:
drv_w25q128_byte_wr(DRV_w25q128_DUMMY_BYTE);
4 drv_w25q128_byte_rd
功能:该函数用于,SPI只读一个字节。
参数:无
返回值:flash返回数据
示例:
drv_w25q128_byte_rd(DRV_w25q128_DUMMY_BYTE);
5 drv_w25q128_busy_wait
功能:该函数用于,W25Q128 忙等待。
参数:无
返回值:无
示例:
while(drv_w25q128_read_reg1() & BIT_BUSY);
6 drv_w25q128_read_reg
功能:该函数用于,读reg。
参数:无
返回值:无
示例:
while(drv_w25q128_read_reg() & BIT_BUSY);
7 drv_w25q128_read_jedecid
功能:该函数用于,读 W25Q128 JEDEC_ID(制造商、类型、容量)。
参数:无
返回值:无
示例:
sample_w25q128_uart_printf("identification is 0x%X, Device id is 0x%X, Manufacturer Device ID is 0x%X",
drv_w25q128_read_identification(), drv_w25q128_read_device_id(), drv_w25q128_read_manufacturer_id());
8 drv_w25q128_read_manufacturer_id
功能:该函数用于,读 W25Q128 制造商 ID。
参数:无
返回值:无
示例:
sample_w25q128_uart_printf("identification is 0x%X, Device id is 0x%X, Manufacturer Device ID is 0x%X",
drv_w25q128_read_identification(), drv_w25q128_read_device_id(), drv_w25q128_read_manufacturer_id());
9 drv_w25q128_read_device_id
功能:该函数用于,读 W25Q128 设备 ID。
参数:无
返回值:无
示例:
sample_w25q128_uart_printf("identification is 0x%X, Device id is 0x%X, Manufacturer Device ID is 0x%X",
drv_w25q128_read_identification(), drv_w25q128_read_device_id(), drv_w25q128_read_manufacturer_id());
10 drv_w25q128_write_enable
功能:该函数用于,写使能。
参数:无
返回值:无
示例:
sample_w25q128_uart_printf("identification is 0x%X, Device id is 0x%X, Manufacturer Device ID is 0x%X",
drv_w25q128_read_identification(), drv_w25q128_read_device_id(), drv_w25q128_read_manufacturer_id());
11 drv_w25q128_write_disable
功能:该函数用于,写失能。
参数:无
返回值:无
示例:
无
12 drv_w25q128_write_page
功能:该函数用于,页编程(调用本函数写入数据前需要先擦除扇区)。
参数:
| 参数 | 释义 |
| pbuf | 数据 |
| addr | 地址 |
| len | 长度 |
返回值:无
示例:
drv_w25q128_write_page(pbuf, addr, pageremain);
13 drv_w25q128_read
功能:该函数用于,读闪存数据。
参数:
| 参数 | 释义 |
| pbuf | 数据 |
| addr | 地址 |
| len | 长度 |
返回值:无
示例:
drv_w25q128_read((UINT8*)rx_buff1, 8181, strlen(tx_buff1));
14 drv_w25q128_sector_erase
功能:该函数用于,扇区擦除。
参数:
| 参数 | 释义 |
| addr | 地址 |
返回值:无
示例:
drv_w25q128_sector_erase(secpos * DRV_w25q128_SOCTOR_SIZE);
15 drv_w25q128_chip_rease
功能:该函数用于,FLASH整片擦除(为了安全起见,若要调用,请先调用 drv_w25q128_write_enable 函数)。
参数:无
返回值:无
示例:
无
16 drv_w25q128_powr_down
功能:该函数用于,掉电。
参数:无
返回值:无
示例:
无
17 drv_w25q128_release_powr_down
功能:该函数用于,读闪存数据。
参数:
| 参数 | 释义 |
| pbuf | 数据 |
| addr | 地址 |
| len | 长度 |
返回值:无
示例:
drv_w25q128_read((UINT8*)rx_buff1, 8181, strlen(tx_buff1));
18 drv_w25q128_write_nocheck
功能:该函数用于,写数据。
参数:
| 参数 | 释义 |
| pbuf | 数据 |
| addr | 地址 |
| len | 长度 |
返回值:无
示例:
drv_w25q128_write_nocheck(w25q128_buffer, secpos * DRV_w25q128_SOCTOR_SIZE, DRV_w25q128_SOCTOR_SIZE);
19 drv_w25q128_write
功能:该函数用于,写闪存数据,可以使任意地址。
参数:
| 参数 | 释义 |
| pbuf | 数据 |
| addr | 地址 |
| len | 长度 |
返回值:无
示例:
drv_w25q128_write((UINT8*)tx_buff1, 8181, strlen(tx_buff1));
20 drv_w25q128_init
功能:该函数用于,写数据。
参数:无
返回值:无
示例:
drv_w25q128_init();
4 Demo实战
4.1 创建一个Demo
复制20.1_file_xtu示例工程,到同一个文件夹下,修改文件名为3.1_SSD1315,如图:

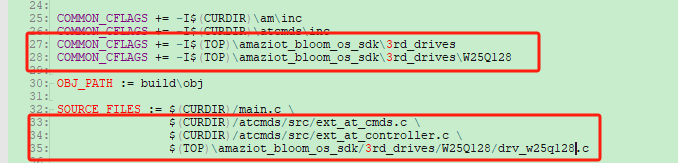
4.2 修改makefile
增加文件组件所在目录头文件路径,和源文件路径,如图:
4.3 增加头文件
使用代码编辑器,将新建的工程文件加入代码编辑器中,打开main.c,修改main.c,加入am.h等头文件,如图:

4.4 修改代码
在Phase2Inits_exit 创建一个任务,如图:

4.1 概述
上电后,按下按键,串口会打印出按下了哪一个按键
4.2 测试
测试步骤:
参考编译教程,和文档开头的编译指令,进行编译
按照编译教程选择对应的选项
烧录
4.3 宏定义介绍
sample_w25q128_uart_printf
输出日志到DEBUG 串口,日志比较少,可以输出到这个串口,如果日志比较多,需要输出到usb口,以免不必要的问题出现
sample_w25q128_catstudio_printf
输出日志到USB 串口,使用catstudio查看,catstudio查看日志需要更新对应版本mdb.txt文件,软件打开filtter过滤日志,只查看用户输出的日志
SAMPLE_W25Q128_STACK_SIZE
栈空间宏定义
4.4 全局变量介绍
sample_w25q128_task_ref
任务指针
4.5 函数介绍
Phase1Inits_enter
底层初始化,本例空
Phase1Inits_exit
底层初始化,本例空
Phase2Inits_enter
底层初始化,本例空
Phase2Inits_exit
创建主任务,初始化INT 引脚
代码片段:
void Phase2Inits_exit(void)
{
int ret;
sample_w25q128_task_stack = malloc(SAMPLE_W25Q128_STACK_SIZE);
ret = OSATaskCreate(&sample_w25q128_task_ref, sample_w25q128_task_stack, SAMPLE_W25Q128_STACK_SIZE, 88, "sample_w25q128_task", sample_w25q128_task, NULL);
ASSERT(ret == OS_SUCCESS);
}
sample_w25q128_task
主任务,代码发分为两部分,一部分是发送不定长数据;另一部分是上电后等待其它模块发送的数据,收到后打印到串口。
代码片段:
static void sample_w25q128_task(void *ptr)
{
int ret = 0;
uint32_t identification = 0;
// unsigned char writeBuf[30] = {0};
// unsigned char readBuf[30] = {0};
// ret = ql_spi_init(QL_SPI_PORT0, QL_SPI_MODE3, QL_SPI_CLK_812_5KHZ);
// sample_w25q128_catstudio_printf("ql_spi_init ret %d", ret);
drv_w25q128_init();
identification = drv_w25q128_read_jedecid();
sample_w25q128_uart_printf("identification is 0x%X, Device id is 0x%X, Manufacturer Device ID is 0x%X",
drv_w25q128_read_jedecid(), drv_w25q128_read_device_id(), drv_w25q128_read_manufacturer_id());
// while(1)
// {
// drv_w25q128_gpio_set(DRV_w25q128_SPI_CS, 0);
// sample_w25q128_uart_printf("low");
// OSATaskSleep(5*200);
// drv_w25q128_gpio_set(DRV_w25q128_SPI_CS, 1);
// sample_w25q128_uart_printf("high");
// OSATaskSleep(5*200);
// }
if(identification != JEDECID)
{
/* 读取错误处理 */
sample_w25q128_uart_printf("SPI read-write Error, please check the connection between MCU and SPI Flashn");
}
else
{
//读取成功处理
char tx_buff1[64] = "abcdefghigklmnopqrstuvwxyz0123456789";
char rx_buff1[64] = {0};
char tx_buff2[64] = "ABCDEFGHIJKLMNOPQRSTUVWXYZ9876543210";
char rx_buff2[64] = {0};
int i = 0;
//测试跨sector写,并且读出数据,写两次,第二次保留第一次部分数据,证明数据擦除,写入正常
drv_w25q128_write((UINT8*)tx_buff1, 8181, strlen(tx_buff1));//从8181地址开始写数据,需要写第二和第三个扇区
drv_w25q128_read((UINT8*)rx_buff1, 8181, strlen(tx_buff1));
sample_w25q128_uart_printf("read flash:%s", rx_buff1);
if(!strncmp(tx_buff1, rx_buff1, strlen(tx_buff1)))
{
sample_w25q128_uart_printf("SPI read-write succeed 1");
}
//验证驱动擦除扇区时,可以保留之前有效内容
drv_w25q128_write((UINT8*)tx_buff2, 8186, strlen(tx_buff2));//从8186地址开始写数据,需要写第二和第三个扇区,同时不能擦掉8181 - 8186的5字节数据
drv_w25q128_read((UINT8*)rx_buff2, 8181, strlen(tx_buff2) + 5);
sample_w25q128_uart_printf("read flash:%s", rx_buff2);
if(!strncmp(rx_buff2, "abcdeABCDEFGHIJKLMNOPQRSTUVWXYZ9876543210", strlen("abcdeABCDEFGHIJKLMNOPQRSTUVWXYZ9876543210")))
{
sample_w25q128_uart_printf("SPI read-write succeed 2");
}
}
// memset(writeBuf, 0x00, sizeof(writeBuf));
// memset(readBuf, 0x00, sizeof(readBuf));
// writeBuf[0] = 0x9F;
while (1)
{
// ret = ql_spi_write_read(QL_SPI_PORT0, readBuf, writeBuf, 1);
// sample_w25q128_catstudio_printf("ql_spi_write_read ret %d, readBuf %02X,%02X,%02Xn", ret, readBuf[0], readBuf[1], readBuf[2]);
// ret = ql_spi_write(QL_SPI_PORT0, writeBuf, 1);
// sample_w25q128_catstudio_printf("ql_spi_write_read ret %d, readBuf %02Xn", ret, writeBuf[0]);
// ret = ql_spi_read(QL_SPI_PORT0, readBuf, 3);
// sample_w25q128_catstudio_printf("ql_spi_write_read ret %d, readBuf %02X,%02X,%02Xn", ret, readBuf[0], readBuf[1], readBuf[2]);
OSATaskSleep(5 * 200);
}
}
4.6 固件

点击下载 Lora Demo固件
5 生态组件链接
SPI NOR FLASH
本文章源自奇迹物联开源的物联网应用知识库Cellular IoT Wiki,更多技术干货欢迎关注收藏Wiki:Cellular IoT Wiki 知识库(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
欢迎同学们走进AmazIOT知识库的世界!
这里是为物联网人构建的技术应用百科,以便帮助你更快更简单的开发物联网产品。
Cellular IoT Wiki初心:
在我们长期投身于蜂窝物联网 ODM/OEM 解决方案的实践过程中,一直被物联网技术碎片化与产业资源碎片化的问题所困扰。从产品定义、芯片选型,到软硬件研发和测试,物联网技术的碎片化以及产业资源的碎片化,始终对团队的产品开发交付质量和效率形成制约。为了减少因物联网碎片化而带来的重复开发工作,我们着手对物联网开发中高频应用的技术知识进行沉淀管理,并基于 Bloom OS 搭建了不同平台的 RTOS 应用生态。后来我们发现,很多物联网产品开发团队都面临着相似的困扰,于是,我们决定向全体物联网行业开发者开放奇迹物联内部沉淀的应用技术知识库 Wiki,期望能为更多物联网产品开发者减轻一些重复造轮子的负担。
Cellular IoT Wiki沉淀的技术内容方向如下:
奇迹物联的业务服务范围:基于自研的NB-IoT、Cat1、Cat4等物联网模组,为客户物联网ODM/OEM解决方案服务。我们的研发技术中心在石家庄,PCBA生产基地分布在深圳、石家庄、北京三个工厂,满足不同区域&不同量产规模&不同产品开发阶段的生产制造任务。跟传统PCBA工厂最大的区别是我们只服务物联网行业客户。
连接我们,和10000+物联网开发者一起 降低技术和成本门槛
让蜂窝物联网应用更简单~~
哈哈你终于滑到最重要的模块了,
千万不!要!划!走!忍住冲动!~
欢迎加入飞书“开源技术交流群”,随时找到我们哦~
点击链接如何加入奇迹物联技术话题群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以获取加入技术话题群攻略
Hey 物联网从业者,
你是否有了解过奇迹物联的官方公众号“eSIM物联工场”呢?
这里是奇迹物联的物联网应用技术开源wiki主阵地,欢迎关注公众号,不迷路~
及时获得最新物联网应用技术沉淀发布
注:本文部分内容来源于网络,如有侵权,请及时联系我们。
审核编辑 黄宇
-
【瑞萨FPB-RA6E2试用】W25Q1282026-01-27 1278
-
W25Q128JVSIM与GD25Q128ESIGR引脚兼容分析2025-10-13 1865
-
BQ79616-Q1软件设计参考2024-09-03 875
-
STM32CUBEMX(13)--SPI,W25Q128外部Flash移植2022-11-14 6159
-
基于RT-Thread的W25Q128虚拟U盘和文件系统如何实现自由切换呢2022-08-04 3322
-
stm32 cubemx usb spi flash w25q128 u盘调试笔记2021-12-14 1938
-
W25Q128 闪存芯片SPI详解2021-11-26 3860
-
W25Q128芯片简介2021-08-13 5035
-
水下航行器通用的数据处理软件设计方案2021-06-30 1045
-
引射氏跨声速风洞流畅控制软件设计方案2021-06-29 839
-
基于基于Qt的集成电路测试软件设计方案2021-06-19 1135
-
W25Q128数据置顶2017-04-09 2910
-
外扩FLASH(W25Q128)如何存储数组中的数据!?2015-12-23 13256
-
想问问外接一个flash有什么用如外接w25q128 spi接口flash2015-04-03 16775
全部0条评论

快来发表一下你的评论吧 !
