

以MSP430F149单片机为控制核心的的点光源跟踪系统设计
控制/MCU
描述
1 系统方案论证
1.1 系统各模块方案的选择与论证
(1)电机驱动模块。采用L298驱动芯片组成驱动电路,可以通过控制中心输出的高低电平对电动机的方向进行控制,并且可以通过PWM波直接控制电动机的速度。电路较为简 ~单,容易实现,驱动能力和抗干扰能力强,性价比高。
(2)LED灯电流调节与光源检测模块。发射端通过直流稳压电源来点亮白光LED,通过调节白光LED两端的电压来调节电流从而调节亮度,接收端采用多个光敏电阻,通过光敏电阻阻值的变化来判断光源的位置。
(3)LED电流检测模块。在LED的下端串联一0.1Ω的电阻,电阻的另一端接地,采用OPA335精密放大器对0.1 Ω电阻的压降进行放大,再通过AD采样处理,从而测量计算出流过LED的电流。
1.2 系统组成
本系统采用两片TI公司的MSP430F149单片机分别作为发送部分和接受部分的控制核心,完成信号发送和接收、电流检测、控制电机、键盘输入及液晶显示等功能。MSP430F149单片机内部资源丰富,集成了A/D模块,无需扩展引脚,电路设计和制作简单,功耗低。
外围电路模块包括:电机驱动模块、LED控制模块、电流检测模块、光信号的发射与接收模块和液晶显示模块。

2 理论分析与硬件电路设计
2.1 LED控制和电流检测电路
LED通过调节LED两端的电压,来改变电流,从而实现亮度的调节,可将LED控制电路采用分压的方式,将LED与一个1OΩ的电阻串联来对LED分压,通过调节串联电路电压来调节电流,控制LED的亮度。经过计算:

即10Ω 电阻的功率最大值将近1.6W。故10Ω 电阻采用3W的功率电阻。
电压调整采用LM317,其输出电压范围为:
即可调范围为4.0 V到8.4V,换算成电流为:
即电流范围可达80~440 mA,可满足在150-350 mA的范围内调节要求。
电流检测模块通过测量电路中已知电阻两端电压来换算出电流,由于用来测量电压的电阻阻值要尽量小,故选择0.1Ω 的功率电阻,并联的放大器等效电阻可忽略不记,经过计算,0.1 Ω 电阻两端的压降在0.008 V~0.042 V之间,电压值非常小,需要经过一级电压放大电路。由于单片机的AD采样内部参考电压最大值为3.3 V,因此放大后电压值3.3V以内。
电压放大采用TI公司的轨到轨运算放大器0PA335,该运放具有良好的电压放大性能,单电源供电,放大直流信号没有衰减,连接为同相比例放大。0PA335的输出接单片机的模拟信号输入端P6.0,进行AD采样。电路如图2所示。
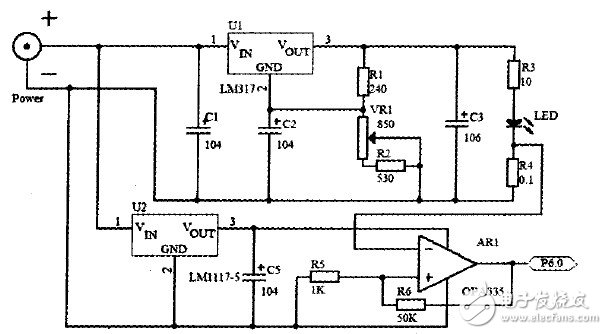
图2 电流调节与检测电路
2.3 电机驱动电路
由于采用步进减速电机,电流较大。
经过测量,在7V电压供电时,电机的电流为1.4A,在5v供电时,电流为0.9 A,系统采用7.2 V的干电池供电,电机驱动芯片需要能够承受较大的电流。故采用L298作为电机驱动,能承受足够大的电流。
2.4 检测光源电路
检测光源电路的主要原理是通过检测到光敏电阻的电阻变化,从而引起电压的变化,单片机通过识别不同的电压信号来控制电机的转动。本设计还采用套黑管的方法提高精确度。
将LM324用做电压比较器,LM324的反向输入端通过两个相等的电阻将电源的电压分半,作为反向输入端的输入电压,在同向输入端同样采用分压的原理,上端连接光敏电阻,下端接一个100K的滑动变阻器来调节光敏电阻的灵敏度。电路如图3所示。
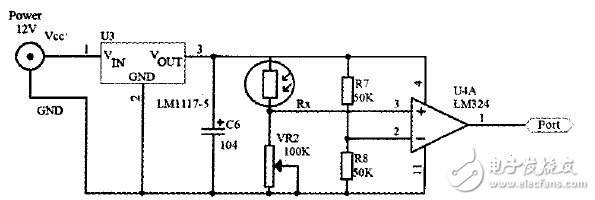
图3 检测光源电路
3 控制算法与软件设计
系统软件主要分为3个部分:检测光源、检测显示电流、步进电机控制。算法设计也围绕这3个方面展开。
3.1 控制算法
水平方向用4个光敏电阻来寻找和跟踪光源,将光敏电阻接入比较器串联滑动变阻器,接在LM324输入端,单片机通过电平变化来判断光源的具体位置。
在没有检测到光时,两个比较器都输出低电平,当有一个检测到光时,与此相连的比较器输出变为高电平,当两个比较器的输出都为高电平时,说明此时光源在两个光敏电阻之间,此时已检测到光源的中心,控制电机停止。
在光源跟踪时,通过判断水平方向两个比较器的状态来实现。当左边的比较器输出为高电平,右边输出低电平时,说明光源左移,控制步进电机左移。同理可控制电机右移。当两个比较器输出都为高电平时,说明光源在中心,不用移动。当两个比较器都输出低电平时,都没检测到光源,此时重新扫描。
由于要实现激光笔对准光源时,将光源支架沿着直线LM平稳缓慢(15秒内)移动60 cm,激光笔能够连续跟踪指向光源,而系统采用的减速步进电机可将一个圆周细分为4096步,每个脉冲走的距离约为:

每个脉冲步进3.07 mm,可实现对光源的连续跟踪。要实现将光源支架沿着直线LM平稳缓慢(15秒内)移动60cm,激光笔能够连续跟踪指向光源,当沿直线移动时,光源的竖直高度将发生变化,竖直方向检测方式类似于水平方向检测跟踪,因而可实现整个平面内跟踪。
3.2软件设计流程图
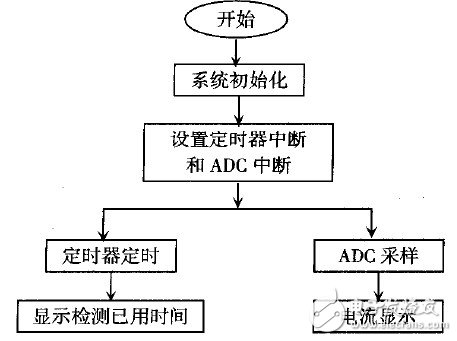
图4 单片机2流程图
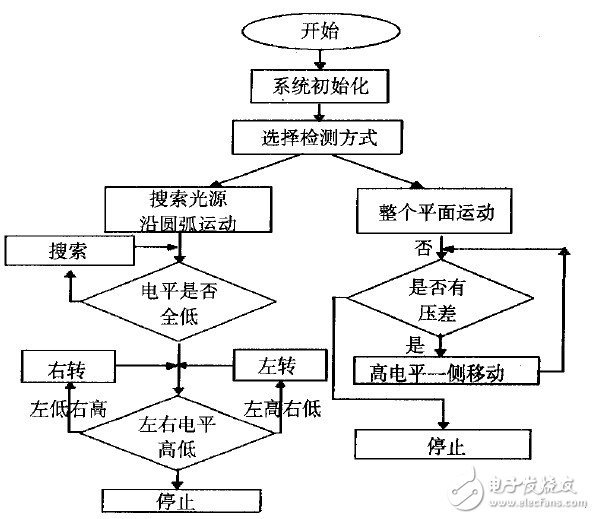
图5 单片机1流程图
-
基于MSP430F149的列车完整性监测系统设计2009-06-18 693
-
基于MSP430F149单片机的SDRAM控制程序设计2009-08-29 496
-
基于MSP430F149单片机的光电编码器位置检测系统设计2009-10-30 3172
-
MSP430F149单片机实现温控仪2012-01-10 4047
-
基于MSP430F149单片机的恒流电子负载系统设计2016-01-04 807
-
基于MSP430F149单片机的语音无线传输系统2016-02-17 836
-
MSP430F1492016-04-29 926
-
基于MSP430F149光源跟踪电路原理分析2017-09-04 1018
-
基于MSP430F149开发板的C应用2017-09-21 957
-
以单片机MSP430F149为主控芯片的超低功耗智能火灾报警系统设计2018-08-08 4458
-
使用MSP430F149单片机控制步进电机的C语言程序免费下载2019-08-26 1286
-
基于MSP430F149单片机的智能玩具车设计2021-10-25 882
-
基于MSP430F149单片机的无线低功耗大容量数据采集记录系统设计2021-10-26 796
-
MSP430F149单片机-IAP升级2021-11-19 742
-
基于双MSP430F149单片机的车辆监控系统车载移动终端设计2023-11-17 462
全部0条评论

快来发表一下你的评论吧 !
