

导弹控制系统设计研究与分析
军用/航空电子
描述
导弹姿态控制系统是导弹上自动稳定和控制导弹绕质心运动的整套装置。它的功能是保证导弹稳定飞行,并根据制导指令控制导弹飞向目标。导弹姿态控制系统由敏感装置、控制计算装置和执行机构3部分组成。敏感装置(如陀螺仪、加速度计等)测量弹体姿态的变化并输出信号。控制计算装置(如计算机)对各姿态信号和制导指令按一定控制规律进行运算、校正和放大并输出控制信号。执行机构(如舵机)根据控制信号驱动舵面或摆动发动机产生使导弹绕质心运动的控制力矩。
导弹控制系统定义
导弹姿态控制系统(missile attitude control system) 自动稳定和控制导弹绕质心运动的弹上整套装置。其主要功能是:在各种干扰情况下,稳定导弹姿态,保证导弹飞行姿态角偏差在允许范围内;根据制导指令,控制导弹姿态角,以调整导弹的飞行方向,修正飞行路线,使导弹准确命中目标。
因为导弹控制系统涉及的组件多,所以从单个组件到总体设计、测试和调整,不仅时间长,而且成本高。一个型号的导弹从设计到定型需要经过慢长的周期。如何才能减少成本,缩短周期一直是人们关注的问题。在精确测定各个组件的传递函数的基础上,对系统进行仿真分析一直是人们首选的方法。如何建立精度高和实时性强控制系统模型是首先必须解决的问题;第二个问题是设计一个控制器使得整个控制系统的性能最优,这是整个控制系统设计的关键。
传统上我们采用的是C、FORTRAN等高级编程语言来编程实现建模,编程语句达几万条,调试复杂,时间一长有时编程人员自己都看不懂自己所编的程序。在这里用MAT-
LAB的Sinuiink软件包进行建模仿真。用Simuiink中的传递函数模块将各个组件连接起来组成初始系统模型;由于初始系统模型的阶数太高,无法运行,为了改善系统仿真的实时性,略去模型中对整体性能影响较小的远离原点偶极子,使模型降阶,形成简化模型;为了设计动态性能和稳态性能最优的控制系统,采用参数易于调整的超前校正,用多个相位超前校正组件串连组成一个控制器;将控制器接入简化模型的前向通道组成一个实际可运行的系统模型,将运行的数据送到工作区进行分析,对控制器的参数用遗传算法进行寻优调整,使系统的幅值裕度和相角裕度达到最优,最终设计出性能最优的控制器,仿真实验证明了该方法的有效性。
建立初始的控制系统模型
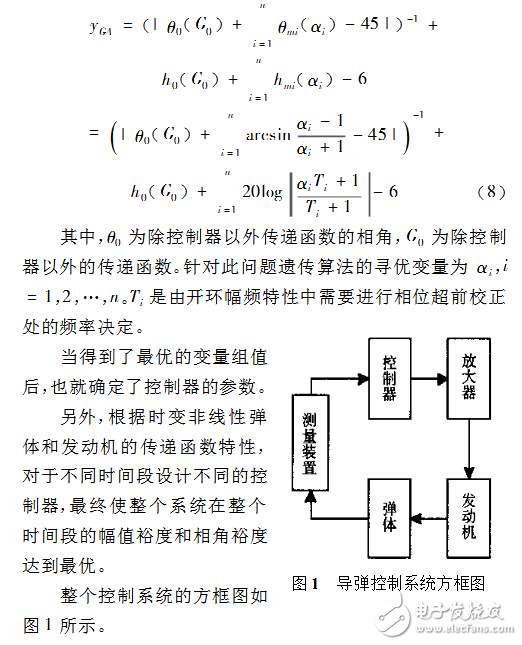
导弹控制系统由测量装置(姿态角陀螺仪、速率陀螺仪、横向加速度表、法向加速度表)、放大器、控制器、发动机和弹体组成。发动机和弹体的的传递函数阶次高,如果直接将其测量的传递函数接入模型,由于运算量太大,系统不能运行。通过下面原理可以对这些系统进行降阶。
设某系统传递函数:

这说明如果有一个零点离某一极点很近(偶极子),则这个极点所对应的运动成份在阶跃响应中所占的比重就会很小。这个极点被离它很近的零点“抵消”了。
另外,如果Gc中有某一个极点距原点的距离很低远,就是说:
这表明远离原点的极点所对应的运动成份对于阶跃响应的影响很小。
在分析发动机和弹体高阶系统后,把符合上述两种情况的极点和零点作为次要的因素而忽略。从而把这两个高阶系统用低阶系统来近似。这样我们就建立一个可以实时运行的初始控制系统模型。
控制器的设计
控制器的设计是控制系统设计的关键。设计控制器的目
的就是使控制系统的动态性能和稳态性能达到最优。即我们要设计的控制器能使系统具有合理的幅值裕度和相角裕度。
幅值裕度能直接指出系统的开环增益还能够增加多大而不致失去稳定。但幅值裕度和相角裕度更重要的作用是告诉人们,系统在参数(或结构)不确定的情况下的稳定裕度,亦即关于系统稳定性的判断的可靠程度。这两项指标应当是一同使用的。不过工程实践中常更多地使用相角稳定裕量这个指标。
除了指明系统在不确定情况下的性质以外,相角裕度还能近似告诉人们,一个系统在阶跃信号作用下的动态特性。系统的稳定裕量过小,阶跃响应往往剧烈,振荡倾向较严重。反之,稳定裕量过大,其动态响应又往往迟缓。因此正确设计系统的相角裕度和幅值裕度可以使控制系统具有适当的动态性能,同时也可避免系统中某些元部件参数不确定性所造成的有害影响。工程上一般设法使相角裕量在300至600之间,增益裕量大小6dB。
为了调整相角裕度和幅值裕度的更加精确,采用多个相位超前校正组件串连组成控制器。
相位超前校正组件的传递函数为:
选择I个相位超前组件,
通过遗传算法来求出各个相位超前校正的参数!。遗传算法(GeneticAlgorithm,GA)是近几年发展起来的一种全局优化算法。在遗传算法中,把变量转换成字符串的形式,最优解的搜索过程就是字符串空间的字符选择、遗传、变异的过程。从实际变量空间到字符串空间的变换过程称之为编码,相反的过程则称为译码。
遗传算法是一种多点搜索技术,一组搜索点称为一个种群,其中的一点称为个体。遗传算法中对种群中个体的优劣性进行评价并根据其优劣程度进行选择的算子称为评价与选择算子;将经过选择的种群中的个体随机两两搭配成对并以某一概率交换它们的部份染色体,即交叉;对经过交叉之后的个体的一位或某几位基因座上的基因值以一定概率进行变换,即变异。通过选择、交叉和变异的一个循环称为一代,经过多代之后,一些好的特性被保存下来,即得到最优的变量值。根据上面的原理我们编写了遗传算法函数程序。它适用于一切多变量函数求极大值问题(极小值问题可通过求其倒数获得)。由于这个编程过于复杂,在此不便具体说明。控制器设计问题的关键就是要列出其遗传算法寻优函数。
要使得相角裕度在45度左右,同时使幅值裕度尽可能大。根据这个原理对幅值裕度和相角裕度列出寻优函数,然后将寻优函数输入遗传算法程序中运行即可求出最优的变量组。
针对此问题遗传算法的寻优函数yGA为:
仿真的精度分析
仿真只有满足了一定的精度要求,仿真才有意义。为了提高控制系统建模的精度,我们首先通过遗传算法求出保证系统具有最优幅值裕度和相角裕度的控制器;然后通过适当调整增益补偿略去远离原点偶极子的影响;最终达到模型与实际系统相一致;仿真实验数据与理论要求的数据相一致。
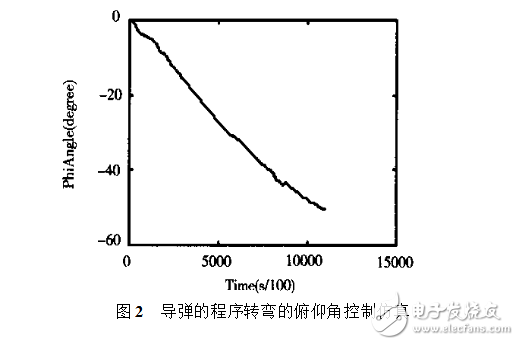
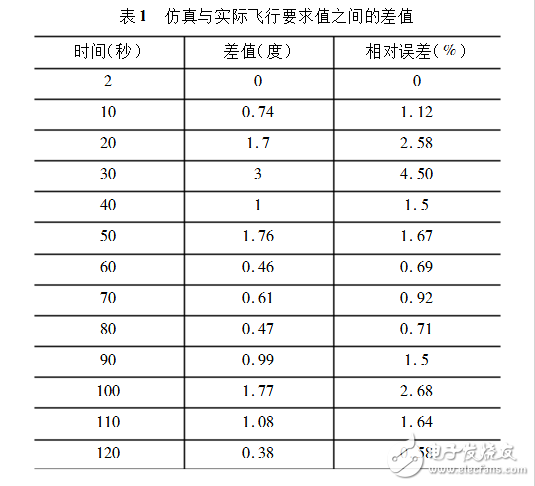
姿态控制系统主要任务首先保证导弹在受到干扰姿态发生改变的情况下,控制系统能即时将导弹修正到正确的姿态,即系统有良好的动态性能和稳态性能,动态性能是由系统相角裕度来保证的,稳态性能是由幅值裕度和相角裕度共同保证。通过上面算法设计的控制器,就可以保证系统具有很好的动态特性和稳态特性。第二个任务是仿真的程序转弯俯仰角在特殊的时间(特征秒)与理论要求相一致。这就是姿态控制系统的两大任务。通过对特征秒的仿真的评估,就可知道仿真的精度。仿真的俯仰角(PhiangIe)如图2所示。表1给出在特征秒处的仿真与实际飞行要求值之间的差值。
精度的实时分析表明:在特征秒的仿真数据与实际飞行要求值之间的差值的相对误差小于5%,这已满足工程精度的要求。随着实验数据的增多,对模型不断修正,模型将更加精确,就可以得到更为精确的弹体和发动机的传递函数。
结论
为了减少导弹控制系统设计的成本,提高姿态控制系统的性能,建立了导弹姿态控制系统模型和设计出了能保证控制系统具有最优相角裕度和幅值裕度的控制器。通过略去对控制系统影响较小的远离原点的偶极子和调整放大系数的方法使模型降阶,满足系统模型运行实时性的要求;为了设计具有最优动态和静态性能的控制系统,选用相位超前校正,用多个相位超前校正组件串连组成控制器,通过遗传算法寻优函数,求出能保证相角裕度为45度,幅值裕度尽可能大的变量值即各个超前校正组件的参数,最终设计出使得幅值裕度和相角裕度最优的控制器。由于弹体和发动机具有非线性和时变的特性,将总的飞行时间分为几个时间段,对于不同时间段设计不同的控制器,最终使整个系统在整个时间段的幅值裕度和相角裕度达到最优。
仿真实验证明了在各个特征秒程序转弯俯仰角与理论值之间的误差小于5%,这个精度满足工程实践的要求。
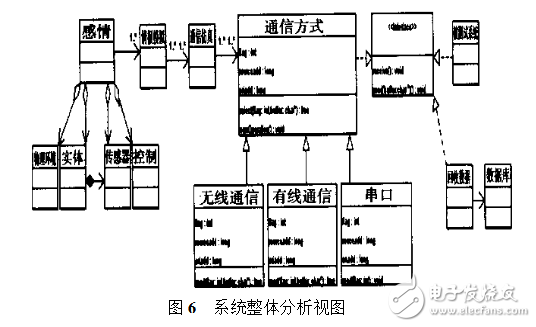
成为亟需解决的问题。本测试环境依托试验仿真技术,将领域技术应用于仿真测试环境领域模型的分析与设计,进而得出系统的原型,同时仿真系统运行的环境来模拟测试建立的原型是否满足系统的要求,从而暴露C3I系统存在的问题。
C3I仿真测试环境模型的分析和设计是一个受控迭代的过程,领域分析以用例为基础,通过架构(architecture)驱动迭代的过程。将领域分析用于C3I仿真测试环境中,为解决C3I系统快速建立原型问题提供了一种建模的方法和指导,加快了系统的开发进度、缩短了系统开发的周期、节省了试验费用,同时还能不断地完善系统的功能和性能。本测试环境的模型已用于指导了某C3I系统的开发研制和集成。
-
电机微机控制系统可靠性分析2025-04-29 236
-
智能电动轮椅控制系统的研究与设计2025-03-07 606
-
基于反馈原理的制导和控制系统操作2023-08-20 1235
-
一种高精度巡航导弹的智能飞行控制系统设计2023-07-18 2254
-
运动控制系统学习笔记2021-06-30 1561
-
教室节能控制系统研究2013-01-18 4390
-
PSPICE在导弹控制系统故障诊断中的应用2009-09-02 496
-
某型导弹控制系统的自动测试研究2009-09-01 715
-
导弹驾驶仪稳定回路动态分析系统设计2009-08-18 803
-
超精密双面抛光机控制系统的研究2009-08-08 2198
-
基于PCI总线的导弹控制系统自动测试研究2009-07-31 659
-
控制系统的时域分析法--控制系统的时域分析法2009-07-27 1531
-
飞航导弹横测通道协调变结构飞行控制系统设计2009-07-16 1157
-
锅炉汽包水位控制系统的研究2009-03-14 5072
全部0条评论

快来发表一下你的评论吧 !
