

在微机自动交换系统中51单片机怎样才能稳定运行?
控制/MCU
描述
在电力线载波通信中,微机自动盘的功能多,逻辑性强,MCS—51单片机在该系统中处理任务时的实时性尤为突出。由于该系统整机配置的主要服务对象是电力调度,且它的使用环境将来多为无人值守站,所以系统工作是否稳定直接影响到电力线载波机的整机性能。针对电力通信特点,在考虑稳定运行方面我们采取了以下几项措施。
1 设置上电延时复位电路
1.1 为什么要进行上电复位
计算机在启动运行时都要进行复位。作为在控制领域中应用最广泛的单片机,复位处理更是设计中的关键。单片机内部的各个功能部件均受特殊功能寄存器控制,程序运行直接受程序计数器指挥,寄存器的复位状态决定了单片机内有关功能部件工作用的初始状态,而程序的正常运行就是从这个状态开始的。如果上电时没有做到正确复位,就可能使CPU从不定地址开始执行指令,系统就得不到正确的初始化,也就不能正常工作。
1.2 复位条件
单片机是靠外部电路复位的。上电复位步骤:
(1)必须首先建立电源Vcc;
(2)Vcc稳定后(达到允许值)时钟振荡器起振;
(3)复位脚必须在振荡器起振后至少保持两个机器周期复位电平。也就是说,复位脚(RST)复位电平维持时间应包括Vcc的建立时间、振荡器起振时间和至少两个机器周期时间。
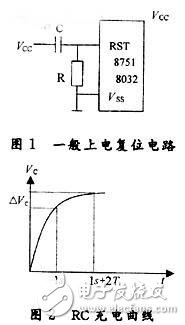
1.3 一般上电复位电路
在上电时,电源Vcc的建立时间应小于几十ms,振荡器的起振时间取决于振荡器频率,对于10MHz晶体,起振时间为1ms,对于1MHz晶体,起振时间一般为10ms。此时可采用一般上电复位电路(图1)。
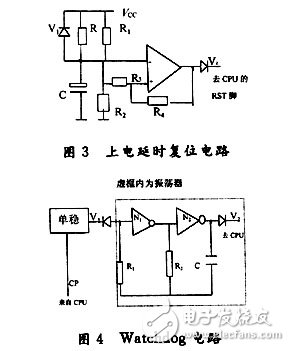
如果对电源Vcc建立运行速度相当缓慢的系统,RC上电复位电路将不能保证系统可靠复位。假如,建立时间为1s,则RC充电曲线如图2所示,此时很难使RC电路输出正常的复位电平(随着RC的充电,RST脚的电位ΔVc越来越低,在电源稳定后,ΔVc的幅度不满足两个机器内复位电平的要求,RST脚就可能退出复位状态)。而且,RST脚因易受电源干扰而产生误复位。
1.4 上电延时复位电路
虽然电力线载波机电源现都采用开关工作方式,建立速度比以往的串联式或并联式调整电源快,但由于机器本身使用的电压等级多,功率要求大,开机后各种电源的建立至少还需要500ms时间才能稳定(+5V电源也不例外),所以在自动交换系统中采用一般上电复位在时间上几乎不可能满足复位要求,这是因为 MCS—51采用一般上电复位电路就要求电源至少在20ms内建立才能保证复位。这属于硬件特性,对于克服这一时延性困难来说,我们不可能做到使所有电力电源都迅速建立(该产品要利用与之配套的设备电源),只有针对MCS—51自身特性在系统设计上采取相应措施。
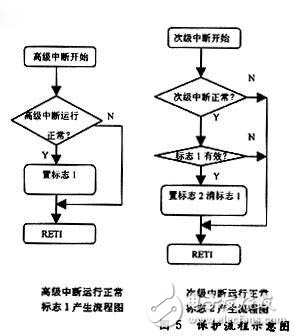
MCS—51硬件复位要保证在Vcc稳定、振荡器起振后至少有两个机器周期(24个振荡器周期)的高电平出现在RST端,即执行内部复位。为此我们设计了一个上电延时电路,该电路能针对不同电源建立时间的长短,改变R、C参数,可调整延时时间。由于采用了该电路,在无人值守站,系统不会因停电、再上电而出现“死机”造成通信中断现象,如图3所示。R1、R2提供比较电位(2/3Vcc),RC充电时间由R、C参数决定,R4为复原信号边缘校正,V1二级管为频繁上电时电容C的泄放电路,V2与Watchdog电路在逻辑上成或关系。开机时同相端电位大于反相端电位,输出为上升的电位(在电源建立期间),RC充电时间足够延迟到电源稳定,当RC充电电压大于2/3Vcc时,该电路输出“0”,至此上电复位正常完成。
2 应用看门狗电路实现系统保护
2.1 复位宽度设计要求
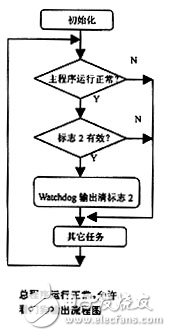
因为MCS—51内部无Watchdog功能(8096系列单片机有),所以需在外部扩展此电路,如图4所示。单稳电路为可再触发电路,只要触发脉冲(CP)正常地作周期性输出,单稳一直处于瞬态阶段,输出低电平。通过V1嵌位,振荡电路停振,振荡器输出“0”不影响RST脚,CPU处于正常工作状态,如果因某种原因CP无输出,单稳处于稳态,输出“1”振荡器起振,输出方波,送至RST脚。为了保证复位,方波宽度远大于两机器周期,且至少应大于CP两个周期,以保证程序有时间作Watchdog
处理(输出正常的触发脉冲,使振荡器停振,输出“0”不影响RST脚)。
2.2 周期性触发脉冲软件设计考虑
由软件产生周期性触发信号来控制该电路工作,以确保系统正常运行。在产生该周期性信号时应注意以下几点:
(1)信号不采取定时器中断方式获得。这基于以下考虑:在初始化后,定时中断即开始工作,假如由于某种信号干扰使主程序转飞,但并未破坏定时器有关中断控制设置,定时中断有可能正常工作,则周期性脉冲可能输出正常,此时Watchdog则不能使主程序恢复正常。
(2)Watchdog输出模块放在主程序中,主程序有几个循环体就应放入几个Watchdog输出模块,以确保主程序不被破坏。
(3)工作程序部分包括主程序和中断程序,Watchdog不仅要保护主程序转飞,而且也要保护中断程序转飞。保护流程如图5所示。设高级中断运行标志为1,次级中断运行正常标志为2。
如果高级中断不能正常运行,那么无标志1,虽然次级中断工作正常,但因无标志1,则无标志2,最终主程序因无标志2,故Watchdog无输出,结果导致系统复位。同理,如次级中断不能正常工作,那么标志2产生,最终导致系统复位;若主程序自身失效,则也无定时输出,最终也导致系统复位,重新使系统恢复正常运行。
3 被破坏数据的修复
Watchdog电路只能保证系统失效后能得到复位处理,重新恢复正常工作,但这说明以前有的工作状态已被破坏,只是不“死机”而已。程序的失效、转飞往往是因为有关转移标志、数据或SFR控制字被破坏所致,不管如何好的系统,要想完全避免这些破坏是不可能的,因为多种多样的干扰源根本无法消除,要想保护这些过程数据不被破坏,只有设法在保护方面尽可能做得更加完善些。
3.1 特殊功能寄存器(SFR)内容的实时刷新
一般情况下,在初始化程序中SFR已被预置好初值,它代表一定的工作方式。在正常运行后,SFR的内容一般是不变的。因为SFR内容代表特定的工作方式,该内容被破坏也就改变了原来设定的工作方式,从而使系统失常。比如,系统设置为以中断方式工作后,就存在中断返回问题,在初始化程序中已设置堆栈(SP)内容,如果由于某种干扰,SP内容被改变,那么中断返回将不能转向预定地址,系统工作必然失常。为了尽量减少破坏的机会,我们将有关SFR放在主程序Watchdog循环输出模块中,以使其不断得到刷新,程序示意图如下:
LOOP: ·
·
·
MOV SP, #10H
MOV TMOD, #12H
MOV SCON, #00H
ANL PSW, #0E7H
SETB TR0
SETB TR1
SETB IT0
MOV IE, #8AH
MOV IP, #02H
·
·
·
LJMP LOOP
3.2 数据区以及位区嵌套式保护
数据RAM区的单元内容多数是运行中经运算或经各种处理而得到的关键数据,这些数据被破坏的可能性更大些,除了干扰源破坏,另外运算错误或处理失误,也会造成错误数据。比如,要想确切地取得一个收信标志位01H的值,首先需查寻收信端是否有效,收信处理将作出判断是否被干扰,如被干扰,则刷新标志(SETB 01H),若有效,则标志为CLR 01H,然后进入收信处理。下面的这些处理都是以位01H作前提的,如果该位被破坏(SETB01H),那么收信处理将无法进行,所以一旦确定进入收信状态后,在处理阶段,要经常重复确认使标志保持有效,即CLR01H,直到该任务完成为止。这也就是说,在完成某一具体任务时,对相关的标志或数据要进行可靠性诊断,作为实时修复,尽量减少被破坏的可能。
4 结束语
保证系统稳定运行和设计一种系统的抗干扰方式,手段多种多样,不能局限于常规方法,要根据应用系统的具体状况及干扰源的种类,采取相应措施。我们所采取的上述方法,经几年来的使用表明比较适合WCZ—X型交换系统,在实际应用中该产品的可靠性得到了很好的验征。
-
基于51单片机最小系统点亮一个灯的程序2023-07-28 3347
-
单片机的按键编程要怎样才能实现呢2022-03-01 1305
-
怎样才能在SDCARD中运行Android系统呢2022-02-18 1320
-
如何才能学好单片机?2021-11-14 784
-
“怎样才能学好单片机”?而且又快又好资料下载2021-04-23 979
-
如何才能学好单片机2020-08-07 1433
-
怎样才能设计出稳定可靠电源2018-06-05 6922
-
怎样才能快速学习8051单片机呢2018-03-29 14714
-
这个功放怎样才能与单片机相连啊,我用杜邦线将它与51单片机相连,可是他不发声音2015-12-07 4094
-
怎样才能做个基于51单片机的超声波测距?2015-05-25 3096
-
怎样才能让单片机串联到更多的led灯?2013-03-16 2142
-
怎样才能学好单片机2013-01-17 6468
-
51单片机在微机自动交换系统中稳定运行的设计方法2011-09-07 1851
全部0条评论

快来发表一下你的评论吧 !
