

在汽车的电控空气悬架系统中单片机有什么应用?
控制/MCU
描述
引言
空气悬架主要有被动悬架和可控电子悬架两种。被动悬架一定程度上抑制和降低了车体和车轮的动载和振动,保证了车辆行驶安全性和乘坐舒适型。但由于被动悬架的刚度和阻尼系数一般按经验选取,只在特定环境下是最优,而一旦载荷,路况,速度等因素发生变化,被动悬架不能随之而自动调节,更不能手动调节。为了克服这一缺陷,电子空气悬架系统(ECAS)由此产生。ECAS是目前最先进的汽车悬架系统,它可以随着路况,载荷,速度等变化因子自动调节悬架刚度,车身高度,减少了空气消耗,且具有反应迅速,安装容易,操作简单等优点,因此可控电子悬架已经成为汽车电子领域研究的一个热门课题,其有着广阔的发展前景。
1 ECAS的组成及原理
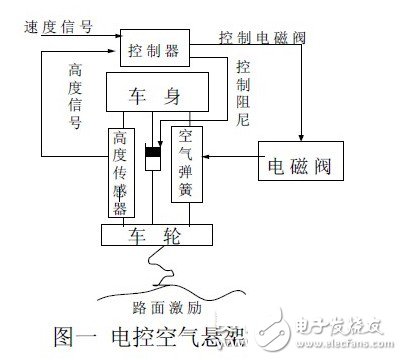
电控空气悬架系统由电子控制单元(ECU),高度传感器、空气弹簧、速度传感器、减震器,车高升降控制键盘等组成。ECU通过高度传感器实时检测车身高度,间接获得车身垂直加速度,同时通过速度传感器检测车辆行驶速度。ECU内保存若干指标高度和三级可调阻尼值,指标高度与弹簧的舒适性、驾驶安全性和与应用规范保持一致。车速在不同的行驶条件下由ECU自动执行相应的指标高度,也可由驾驶员手动控制高度和阻尼值。通过比较高度传感器检测结果和指标高度,若高度差超过了一定的公差范围,电磁阀就会被激发,通过充放气将实际高度调整到指标高度。减震器阻尼力共三档,根据车身上升速度、加速度控制减震器,执行相应的阻尼力,从而满足汽车行驶平顺性和乘坐舒适型的要求。电控空气悬架组成结构如图1。
2 ECAS系统各功能模块的设计
ECAS主要由6大功能模块组成,分别是中央处理单元,信号输入模块(即传感器信号),信号输出模块(即控制量的输出),操作界面模块,电源模块,其他模块(外接存储器,RS485通信,系统的升级扩展端口)。
2.1 MC9S08GB60
单片机是ECU的核心部件,它要经常处理大量的输入和输出信号,而且要实现高精度和实时控制。本设计采用了美国飞思卡尔公司的加强型8位车用微控制器——MC9S08GB60单片机。该单片机内有64Kflash和4K的E2PROM,高度集成了四个串行通信端口(SCI1,SCI2,SPI,I2C),最多达8个定时器(PWM),8通道的10位A/D转换模块。
2.2 信号传感输入模块
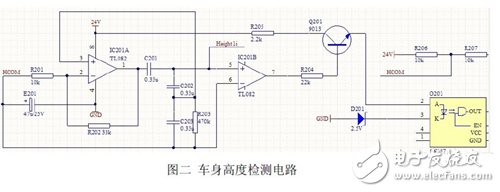
该模块主要由3个高度传感器和1个速度传感器构成。车身高度传感器等效电感串联电阻。等效电感0°转角时对应约20mH,-45°转角时对应约8mH,+45°转角时对应约35mH。等效电阻120Ω。为此设计了LC三点式振荡电路来检测车身高度传感器传来的信号,即设计一个正弦波发生器,由TL082元件及外围电路构成,正弦波的频率随高度传感器等效电感的变化而不断变化,而后经比较器出来一个频率随电感不断变化的方波,经三极管放大和光耦隔离后输入到MCU的输入捕捉端口。MCU通过检测这一不断变化的频率来实现对高度传感器传来信号的检测。电路如图2所示,对速度传感器信号的检测也是通过检测其频率实现的,原理同高度传感输入电路类似。
2.3 信号控制输出模块
ECU采用PWM方式输出控制电磁阀的开启,根据当前实际高度与预期调节高度的偏差来输出控制信号。ECU计算电磁阀的调节脉冲长度,如果需要调节的高度量大、由于没有过冲危险,ECU将给出一个长的脉冲,同时,快的上升速度将减小脉冲长度,这样就能精确控制车辆的高度调节速度,极大的避免了高度的过冲及振荡调节。对于电磁阀的驱动,本设计选用了安森美半导体公司生产的NUD3124继电器驱动芯片。NUD3124(汽车版本)器件的高反向雪崩能量容量(350mJ)可以控制大多数用于汽车应用的继电器。控制信号经过光耦隔离后输出给NUD3124驱动芯片,由NUD3124驱动电磁阀工作,并在NUD3124的输出端加了一个二极管保护电路。
2.4 电源模块,操作界面模块及其他扩展功能模块
ECAS系统主要有两种电压源,一是24V电压源,二是3V电压源。其中3V电压源分数字电压源和模拟电压源。24V电源是由车辆自身电源引出,然后经π型滤波,再经稳压管稳压,在经过一个滤波电路最终得到一个稳定的24V电压源。3V电压源与此类似,只是须要在数字电源和模拟电源之间加上一个隔离电阻,以防串扰。
操作界面主要是键盘输入和发光二极管显示。当司机要手动控制阻尼和车高的时候,便可通过键盘输入其操作,然后相应的发光二极管亮,显示其输入。键盘输入经过了滤波,光耦隔离和IC106滤波及保护,最终送入ECU,然后ECU输出控制驱动相应发光二极管点亮。其他模块主要包括便于日后升级的接口,以及RS485通信,大容量存储器等。大容量存储器采用了ATMAL公司的AT24C1024,其通过PTC2/SDA和PTC3/SCL与单片机相连;RS485用典型接法即可,芯片采用max3485;其他未用引脚均通过插槽引出,以便于日后升级之用。
3 汽车ECAS的软件设计方案
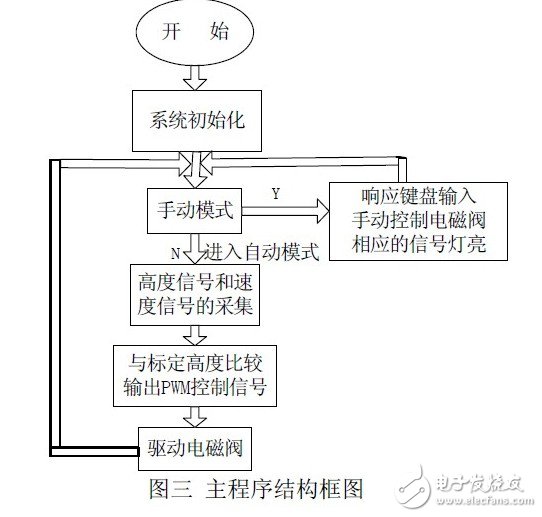
空气悬架电子控制单元(ECAS)应用软件由系统初始化模块、判断手动自动调高模块、信号采集模块,键盘响应模块,输出控制模块等构成。主程序为一循环体,它担负调节车身高度和阻尼的任务,车身高度信号经传感器转换为具有一定占空比的方波信号,然后经过与微处理器中预设的标定高度进行比较,输出控制信号,当快达到标定高度时,减小输出信号的占空比,以防止过充。具体主程序框图如图3所示。
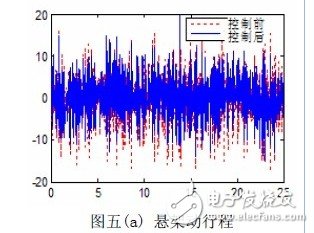
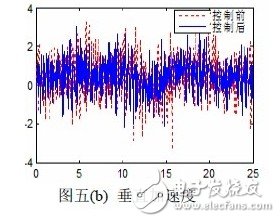
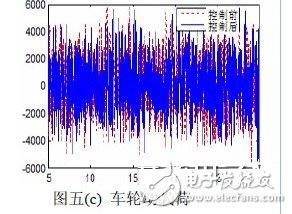
4 试验及结果分析
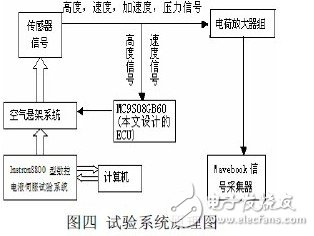
本设计做了两自由度1/4车辆空气悬架试验,通过在一定频率特性下,对比分析电控空气悬架和被动空气悬架在相同的路面激励下,得到不同的悬架动行程,车辆动载荷及垂直加速度,来验证本设计的可行性,验证本设计是否达到了提高车辆行驶平顺性和乘坐舒适型的目的。为下一步将科研成果转换成汽车电子产品提供技术储备和试验手段。
-
联合电子电控悬架控制系统的传感器产品介绍2024-09-13 1503
-
基于CANoe在电控悬架系统中PSI5传感器仿真及应用2024-06-27 2276
-
基于TMS320F28单片机的汽车电控悬架系统2023-05-30 1532
-
用于汽车悬架系统压力监测的P1602压力传感器2020-07-07 2652
-
关于电控空气悬架系统的性能分析2019-09-25 4438
-
在汽车的动力总成系统中单片机有什么应用?2018-08-15 12370
-
汽车电子控制悬架系统的解析2017-11-20 2408
-
MC68HC811E2单片机在柴油机喷油泵电控系统中里的应用2017-10-31 1431
-
单片机系统机电控制2017-09-22 782
-
单片机在汽车电控空气悬架系统中的应用2011-06-14 3591
-
基于PlD控制的电控空气悬架系统设计2010-07-14 983
-
单片机在家电控制系统中的应用2010-01-12 2388
-
基于多体系统动力学的空气悬架大客车平顺性试验仿真研究2009-12-02 4117
-
汽车空气悬架的发展及我国研发对策思考2009-07-25 933
全部0条评论

快来发表一下你的评论吧 !
