

opencv边缘检测原理
嵌入式设计应用
描述
边缘检测的理解可以结合前面的内核,说到内核在图像中的应用还真是多,到现在为止学的对图像的操作都是核的操作,下面还有更神奇的!
想把边缘检测出来,从图像像素的角度去想,那就是像素值差别很大,比如X1=20和X2=200,这两个像素差值180,在图像的显示就非常明显,这样图像的边缘不就体现出来了?但是问题来了,一幅图像给你,如果一个像素一个像素对比,
边缘检测原理及步骤
在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。
在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。这就使得在边缘检测中首先要进行的工作是滤波。
1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。
2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。
3)检测:经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。实际工程中,常用的方法是通过阈值化方法来检测。
边缘检测算法
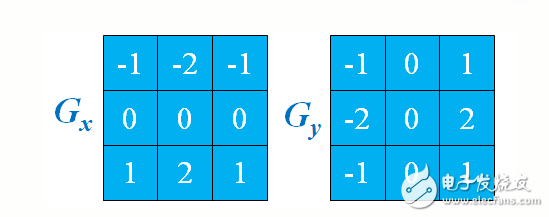
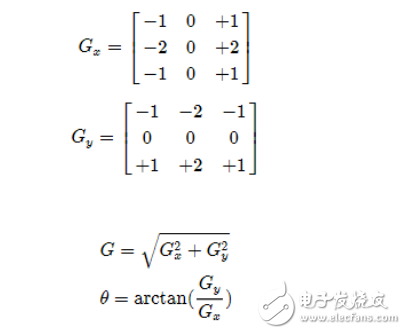
1、Sobel边缘检测算法为例。
Sobel卷积核模板为:
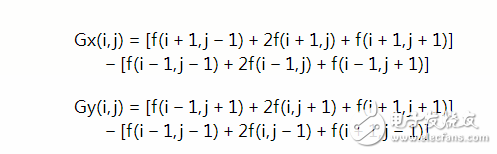
偏导公式为:
2、Robert算子检测边缘:
x和y方向的算子
观察上诉的算子,可以发现和我们刚开始设想的一个一个比较差不多,比如本来比如X1=20和X2=40,这两个像素差值20,但是20体现不出来,所以用1,-1来增大这种差值,这其实解决了我们上诉遇到的第一点问题了,但是后面的两点依然没有解决。
具体的例子我们可以用opencv自带的API,addwight进行试验,把核改一下就行了。。。
Roberts算子检测方法对具有陡峭的低噪声的图像处理效果较好,但是利用roberts算子提取边缘的结果是边缘比较粗,因此边缘的定位不是很准确。
X和Y方向
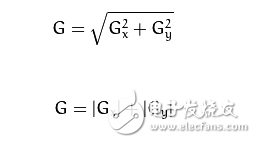
对X\Y两个方向的梯度进行合并
3、 Laplacian算子检测边缘:
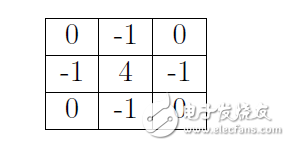
拉普拉斯算子
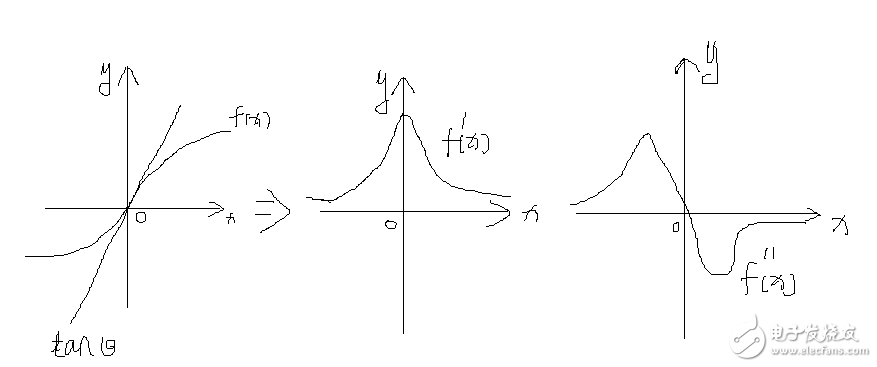
拉普拉斯边缘检测是通过二阶倒数,从上面的一阶倒数的理解就不难发现二阶倒数是怎么进行的了。
二阶倒数比一阶倒数的好处是在与受到周围的干扰小,其不具有方向性,操作容易,且对于很多方向的图像处理好。
Laplacian算子法对噪声比较敏感,所以很少用该算子检测边缘,而是用来判断边缘像素视为与图像的明区还是暗区。
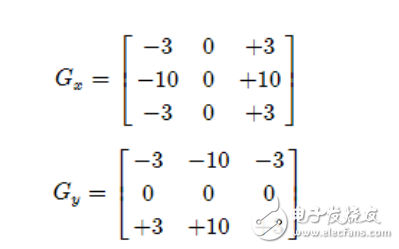
4、Scharr算子检测边缘:
这个滤波是Sobel的升级版,原理是一样的,就是实现的近似代替不一样,说白了就事核改进了。。。
5、.Canny算子检测边缘:
这是比较新的算法,运用的也是最广泛的。这个算法是在Sobel算法的基础上改进的,和Scharr不一样!
Canny的步骤是:1.给一张图片,先进行滤波消除干扰,滤波前面博客已经说明。
2.计算梯度(进行Sobel算子计算)。
3.非极大值抑制。
4.滞后阈值。
下面一届具体介绍-》》》》
在opencv2.0的时候,直接调用API就帮你完成全部的工作,包含上面的四部。
现在opencv3.0滤波得自己操作,API完成了后三步操作。
这里在Sobel运行之后的基础上对图像的边缘进行了优化,哪些是优秀的,哪些是差的,在这里会处理。
---细谈边缘检测---
上面讲到Canny的非极大值抑制和滞后阈值,其中这两点是这个算法的核心!
非极大值抑制:
从字面上的理解就是从一群数据中找到真正的极大值,对于不是极大值的省略或者抑制显示。
我们来想一下,Sobel算子计算的值就是边缘的值吗?1.算子是固定的,那就有很大的几率会计算到不是边缘的数据。
2.计算的结果不会省略不好的点,也不会去加强好的点,所以显示就不明显。
我们的目的就是改进上面两个点,对于第一个点,我们得比较那些计算的点进行比较,把不好点舍去---》》》
以前在神经网络那篇博文里提到过“梯度”的概念,就是数据下降或者上升最快的方向,简单的说就是求导切线的方向!
试想一下我们在这个方向上找最大和最小值是最快最准确的,这个具体原因神经网络那篇博文说过了,可以去看看。
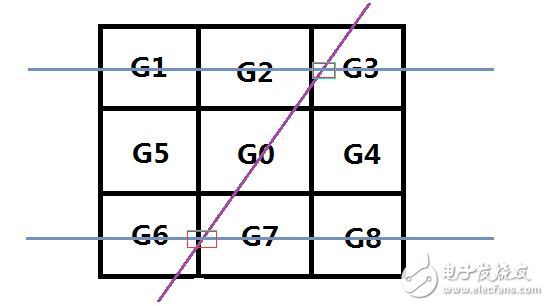
通过计算我们得到了θ的值在[-π/2,+π/2]区间,然后我们就可以比较在这个方向上的G和左右G1、G2的大小,当G》G1、G2的时候,那就说明这个G就是局部极大值,从而保留下来:
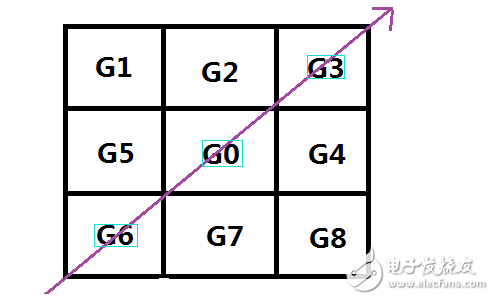
例如:G0的θ是45度,那么在它的梯度方向来对比它是不是最大值,如果是的话那就说明它是局部极大值-》判断G0和(G3、G6)的大小关系!G0 = G0》G3&&G0》G6? G0:0;
上面的方法是第一代非极大值抑制算法,缺点是当 θ!=0、45、90、180 时,那么旁边的八个值就不在θ的梯度上,就没办法去做比较了,这时候出现第二代算法---》》》
插值法运用在非最大值抑制算法中:
插值法:就是y=kx+b的插值公式,比如:X1和X2中间想插一点X,X = X1 + k(X2-X1)或者X= k*X1 +(1-k)X2 当然插值法还有其它形式,不过两点的线性插值比较简单的。这里使用第二者!
上面的图形是当 |Gy|》|Gx| && Gx*Gy》0 的情况。前者保障靠近y轴,后者保证θ》0.
注释:在有的文章上看的和我说的相反,按照数学知识应该是这样的啊,具体原因我也不知道了。
令 k = |Gy/Gx|
G23 = k*G2 + (1-k)*G3;
G67 = k*G6 + (1-k)*G7;
G0 = G0》G23 && G0》G67 ? G0:0;或者这里可以突出重点给定G0的值G0 = G0》G23 && G0》G67 ? 200:0;
opencv的源码就是使用这种方法的,大家可以参考源码:
1 void NonMaxSuppress(int*pMag,int* pGradX,int*pGradY,SIZE sz,LPBYTE pNSRst)
2 {
3 LONG x,y;
4 int nPos;
5 // the component of the gradient
6 int gx,gy;
7 // the temp varialbe
8 int g1,g2,g3,g4;
9 double weight;
10 double dTemp,dTemp1,dTemp2;
11 //设置图像边缘为不可能的分界点
12 for(x=0;x《sz.cx;x++)
13 {
14 pNSRst[x] = 0;
15 pNSRst[(sz.cy-1)*sz.cx+x] = 0;
16
17 }
18 for(y=0;y《sz.cy;y++)
19 {
20 pNSRst[y*sz.cx] = 0;
21 pNSRst[y*sz.cx + sz.cx-1] = 0;
22 }
23
24 for (y=1;y《sz.cy-1;y++)
25 {
26 for (x=1;x《sz.cx-1;x++)
27 {
28 nPos=y*sz.cx+x;
29 // if pMag[nPos]==0, then nPos is not the edge point
30 if (pMag[nPos]==0)
31 {
32 pNSRst[nPos]=0;
33 }
34 else
35 {
36 // the gradient of current point
37 dTemp=pMag[nPos];
38 // x,y 方向导数
39 gx=pGradX[nPos];
40 gy=pGradY[nPos];
41 //如果方向导数y分量比x分量大,说明导数方向趋向于y分量
42 if (abs(gy)》abs(gx))
43 {
44 // calculate the factor of interplation
45 weight=fabs(gx)/fabs(gy);
46 g2 = pMag[nPos-sz.cx]; // 上一行
47 g4 = pMag[nPos+sz.cx]; // 下一行
48 //如果x,y两个方向导数的符号相同
49 //C 为当前像素,与g1-g3 的位置关系为:
50 //g1 g2
51 // C
52 // g4 g3
53 if(gx*gy》0)
54 {
55 g1 = pMag[nPos-sz.cx-1];
56 g3 = pMag[nPos+sz.cx+1];
57 }
58 //如果x,y两个方向的方向导数方向相反
59 //C是当前像素,与g1-g3的关系为:
60 // g2 g1
61 // C
62 // g3 g4
63 else
64 {
65 g1 = pMag[nPos-sz.cx+1];
66 g3 = pMag[nPos+sz.cx-1];
67 }
68 }
69 else
70 {
71 //插值比例
72 weight = fabs(gy)/fabs(gx);
73 g2 = pMag[nPos+1]; //后一列
74 g4 = pMag[nPos-1]; // 前一列
75 //如果x,y两个方向的方向导数符号相同
76 //当前像素C与 g1-g4的关系为
77 // g3
78 // g4 C g2
79 // g1
80 if(gx * gy 》 0)
81 {
82 g1 = pMag[nPos+sz.cx+1];
83 g3 = pMag[nPos-sz.cx-1];
84 }
85
86 //如果x,y两个方向导数的方向相反
87 // C与g1-g4的关系为
88 // g1
89 // g4 C g2
90 // g3
91 else
92 {
93 g1 = pMag[nPos-sz.cx+1];
94 g3 = pMag[nPos+sz.cx-1];
95 }
96 }
97 //--线性插值等价于dTemp1 = g1 + weight*(g2-g1)--//
98 dTemp1 = weight*g1 + (1-weight)*g2;
99 dTemp2 = weight*g3 + (1-weight)*g4;
100 //当前像素的梯度是局部的最大值
101 //该点可能是边界点
102 if(dTemp》=dTemp1 && dTemp》=dTemp2)
103 {
104 pNSRst[nPos] = 128;
105 }
106 else
107 {
108 //不可能是边界点
109 pNSRst[nPos] = 0;
110 }
111 }
112 }
113 }
114 }
在论文中海油一个改进的插值,用二次插值代替一次插值,学过数值分析的都知道,一次插值在直线很好,但是在曲线不好,当然二次插值也不能消除很多误差,当然海油牛顿插值等等。
这是当Gx和Gy同号的情况,另一种情况自己想一下就行了。
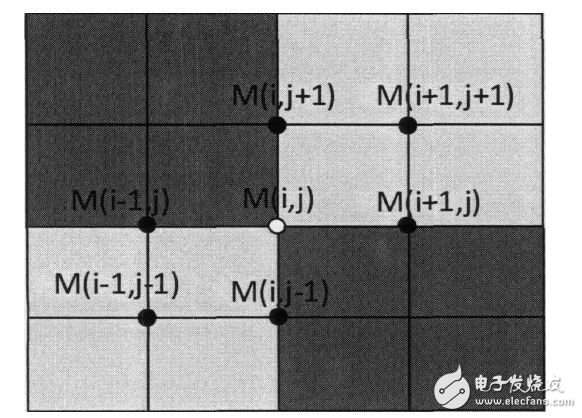
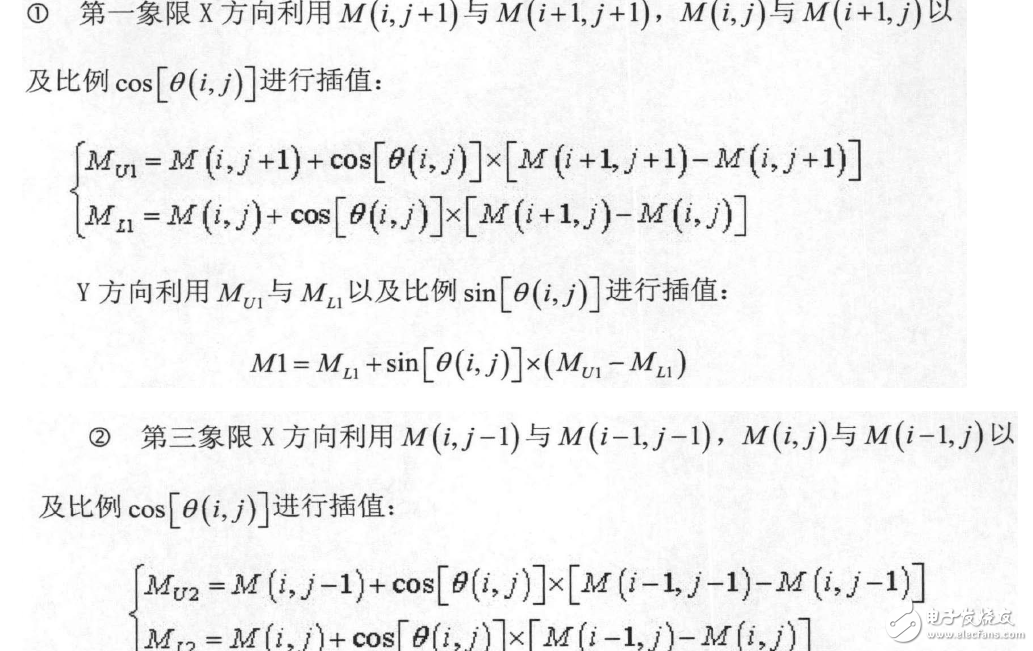
二次插值相比较一次插值的优点是:不用考虑哪个哪个具体的角度。其实很多人都提到了0、45、90、180的角度划分,我这里没有提到,原理是一样的,我感觉直接做就好了,没必要再去弄个中间变量过度一下,可能为了理解吧。
滞后阈值:
1. T1, T2为阈值,凡是高于T2的都保留,凡是小于T1都丢弃。
2.如果介于T1和T2之间的话,判断是否连接T2,如果没连接T2那就删除。
3.T1和T2比例最好1:2/1:3
这里说明一下第二点:
A.我们的目的是找到最大边缘变化。
B.并且保证边缘显示效果很好。
对于A来说,我们非最大值抑制已经找到部分最大值,现在用T2再进行一遍,已经很好的达到我们A目的了。
对于B来说,用T1去滤去可能不是最大值的点,现在用第二点来加强显示,在T2附近的保留,不在的都删除(意思就是在最小值附近)。
看下面这个例子,T1=2,T2=9 用核3X3去找T2附近的值,那就表示只有6个值可以保留,其他值都将被删除。
第一步:整个图像去找T》T2和T《T1的值,删除或者保留,并且标记记录。
第二步:在上一步记录的最大值附近寻找存在的值,直接删除或者保留。
- 相关推荐
- 热点推荐
- OpenCV
-
如何在OpenCV中使用基于深度学习的边缘检测?2023-05-19 3077
-
Rayeager PX2开发板测试opencv边缘检测效果2015-01-14 2525
-
【DragonBoard 410c试用体验】之OpenCV中canny算子边缘检测2016-09-11 9396
-
【触觉智能 Purple Pi OH 开发板体验】三、Ubuntu镜像安装OpenCV边缘检测开发2023-09-09 918
-
openCV边缘检测原理是什么?2023-10-10 547
-
OpenCV边缘检测示例程序2015-01-19 831
-
边缘检测综合示例_OpenCV3版书本配套示例程序602016-06-06 521
-
什么是边缘检测?边缘检测的算法由来2021-03-12 9901
-
OpenCV使用深度学习做边缘检测的流程2021-05-08 3159
-
如何进行图像边缘的检测2023-06-20 2274
-
OpenCV边缘检测算子Laplace、LoG详解2023-12-21 4338
全部0条评论

快来发表一下你的评论吧 !
