

opencv相机标定原理与步骤
嵌入式设计应用
描述
我们首先介绍下计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系。以及他们之间的关系。然后介绍如何使用张正友相机标定法标定相机。
总体原理:
摄像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵的过程。
基本的坐标系:
世界坐标系;
相机坐标系;
成像平面坐标系;
像素坐标系
一般来说,标定的过程分为两个部分:
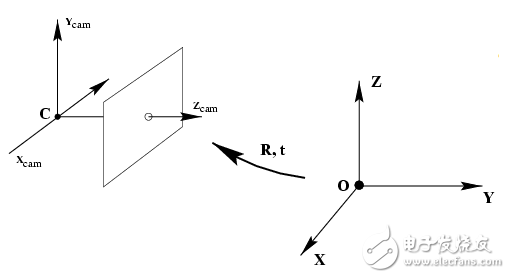
第一步是从世界坐标系转为相机坐标系,这一步是三维点到三维点的转换,包括R,t(相机外参,确定了相机在某个三维空间中的位置和朝向)等参数;
第二部是从相机坐标系转为成像平面坐标系(像素坐标系),这一步是三维点到二维点的转换,包括K(相机内参,是对相机物理特性的近似)等参数;
投影矩阵 : P=K [ R | t ] 是一个3×4矩阵,混合了内参和外参而成。
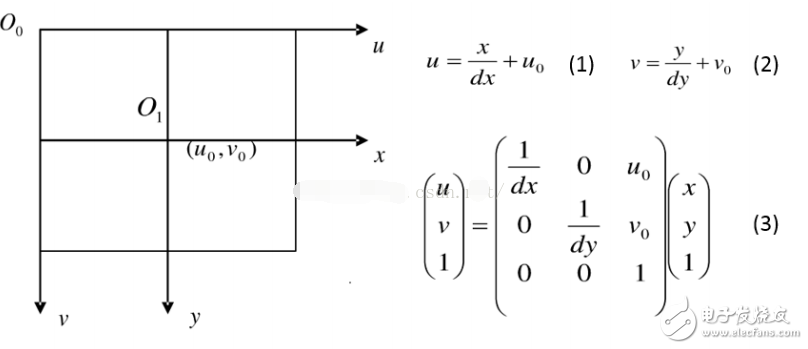
图像坐标系:
理想的图像坐标系原点O1和真实的O0有一定的偏差,由此我们建立了等式(1)和(2),可以用矩阵形式(3)表示。
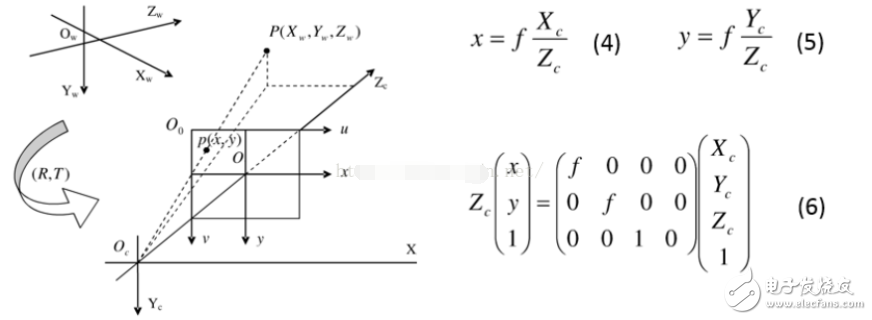
相机坐标系(C)和世界坐标系(W):
通过相机与图像的投影关系,我们得到了等式(4)和等式(5),可以用矩阵形式(6)表示。我们又知道相机坐标系和世界坐标的关系可以用等式(7)表示:
由等式(3),等式(6)和等式(7)我们可以推导出图像坐标系和世界坐标系的关系:
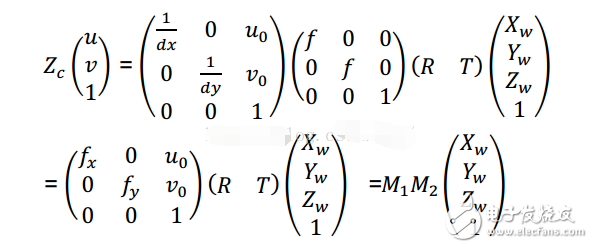
其中M1称为相机的内参矩阵,包含内参(fx,fy,u0,v0)。M2称为相机的外参矩阵,包含外参(R:旋转矩阵,T:平移矩阵)。
众所周知,相机镜头存在一些畸变,主要是径向畸变(下图dr),也包括切向畸变(下图dt)等。
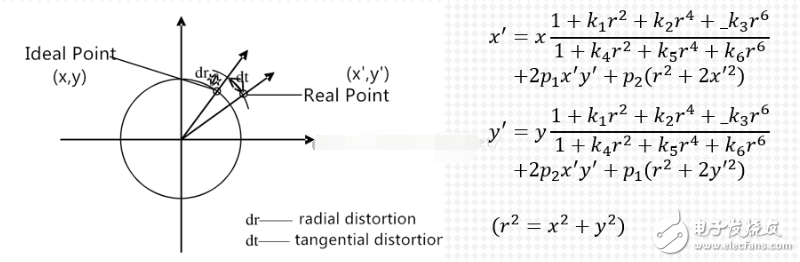
上图右侧等式中,k1,k2,k3,k4,k5,k6为径向畸变,p1,p2为切向畸变。在OpenCV中我们使用张正友相机标定法通过10幅不同角度的棋盘图像来标定相机获得相机内参和畸变系数。函数为calibrateCamera(objectPoints, imagePoints, imageSize, cameraMatrix, distCoeffs, rvecs, tvecs,flag)
objectPoints: 一组世界坐标系中的3D
imagePoints: 超过10张图片的角点集合
imageSize: 每张图片的大小
cameraMatrix: 内参矩阵
distCoeffs: 畸变矩阵(默认获得5个即便参数k1,k2,p1,p2,k3,可修改)
rvecs: 外参:旋转向量
tvecs: 外参:平移向量
flag: 标定时的一些选项:
CV_CALIB_USE_INTRINSIC_GUESS:使用该参数时,在cameraMatrix矩阵中应该有fx,fy,u0,v0的估计值。否则的话,将初始化(u0,v0)图像的中心点,使用最小二乘估算出fx,fy。
CV_CALIB_FIX_PRINCIPAL_POINT:在进行优化时会固定光轴点。当CV_CALIB_USE_INTRINSIC_GUESS参数被设置,光轴点将保持在中心或者某个输入的值。
CV_CALIB_FIX_ASPECT_RATIO:固定fx/fy的比值,只将fy作为可变量,进行优化计算。当CV_CALIB_USE_INTRINSIC_GUESS没有被设置,fx和fy将会被忽略。只有fx/fy的比值在计算中会被用到。
CV_CALIB_ZERO_TANGENT_DIST:设定切向畸变参数(p1,p2)为零。
CV_CALIB_FIX_K1,。。。,CV_CALIB_FIX_K6:对应的径向畸变在优化中保持不变。
CV_CALIB_RATIONAL_MODEL:计算k4,k5,k6三个畸变参数。如果没有设置,则只计算其它5个畸变参数。
首先我们打开摄像头并按下‘g’键开始标定:
[cpp] view plain copy print?
VideoCapture cap(1);
cap.set(CV_CAP_PROP_FRAME_WIDTH,640);
cap.set(CV_CAP_PROP_FRAME_HEIGHT,480);
if(!cap.isOpened()){
std::cout《《“打开摄像头失败,退出”;
exit(-1);
}
namedWindow(“Calibration”);
std::cout《《“Press ‘g’ to start capturing images!”《《endl;
VideoCapture cap(1);
cap.set(CV_CAP_PROP_FRAME_WIDTH,640);
cap.set(CV_CAP_PROP_FRAME_HEIGHT,480);
if(!cap.isOpened()){
std::cout《《“打开摄像头失败,退出”;
exit(-1);
}
namedWindow(“Calibration”);
std::cout《《“Press ‘g’ to start capturing images!”《《endl;
[cpp] view plain copy print?
if( cap.isOpened() && key == ‘g’ )
{
《span style=“white-space:pre”》 《/span》mode = CAPTURING;
}
if( cap.isOpened() && key == ‘g’ )
{
《span style=“white-space:pre”》 《/span》mode = CAPTURING;
}
按下空格键(SPACE)后使用findChessboardCorners函数在当前帧寻找是否存在可用于标定的角点,如果存在将其提取出来后亚像素化并压入角点集合,保存当前图像:
[cpp] view plain copy print?
if( (key & 255) == 32 )
{
image_size = frame.size();
/* 提取角点 */
Mat imageGray;
cvtColor(frame, imageGray , CV_RGB2GRAY);
bool patternfound = findChessboardCorners(frame, board_size, corners,CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE + CALIB_CB_FAST_CHECK );
if (patternfound)
{
n++;
tempname《《n;
tempname》》filename;
filename+=“.jpg”;
/* 亚像素精确化 */
cornerSubPix(imageGray, corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
count += corners.size();
corners_Seq.push_back(corners);
imwrite(filename,frame);
tempname.clear();
filename.clear();
}
else
{
std::cout《《“Detect Failed.\n”;
}
}
if( (key & 255) == 32 )
{
image_size = frame.size();
/* 提取角点 */
Mat imageGray;
cvtColor(frame, imageGray , CV_RGB2GRAY);
bool patternfound = findChessboardCorners(frame, board_size, corners,CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE + CALIB_CB_FAST_CHECK );
if (patternfound)
{
n++;
tempname《《n;
tempname》》filename;
filename+=“.jpg”;
/* 亚像素精确化 */
cornerSubPix(imageGray, corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
count += corners.size();
corners_Seq.push_back(corners);
imwrite(filename,frame);
tempname.clear();
filename.clear();
}
else
{
std::cout《《“Detect Failed.\n”;
}
}
角点提取完成后开始标定,首先初始化定标板上角点的三维坐标:
[cpp] view plain copy print?
for (int t=0;t《image_count;t++)
{
《span style=“white-space:pre”》 《/span》vector《Point3f》 tempPointSet;
for (int i=0;i《board_size.height;i++)
{
《span style=“white-space:pre”》 《/span》for (int j=0;j《board_size.width;j++)
{
/* 假设定标板放在世界坐标系中z=0的平面上 */
Point3f tempPoint;
tempPoint.x = i*square_size.width;
tempPoint.y = j*square_size.height;
tempPoint.z = 0;
tempPointSet.push_back(tempPoint);
《span style=“white-space:pre”》 《/span》}
}
object_Points.push_back(tempPointSet);
}
for (int t=0;t《image_count;t++)
{
《span style=“white-space:pre”》 《/span》vector《Point3f》 tempPointSet;
for (int i=0;i《board_size.height;i++)
{
《span style=“white-space:pre”》 《/span》for (int j=0;j《board_size.width;j++)
{
/* 假设定标板放在世界坐标系中z=0的平面上 */
Point3f tempPoint;
tempPoint.x = i*square_size.width;
tempPoint.y = j*square_size.height;
tempPoint.z = 0;
tempPointSet.push_back(tempPoint);
《span style=“white-space:pre”》 《/span》}
}
object_Points.push_back(tempPointSet);
}
使用calibrateCamera函数开始标定:
[cpp] view plain copy print?
calibrateCamera(object_Points, corners_Seq, image_size, intrinsic_matrix ,distortion_coeffs, rotation_vectors, translation_vectors);
calibrateCamera(object_Points, corners_Seq, image_size, intrinsic_matrix ,distortion_coeffs, rotation_vectors, translation_vectors);
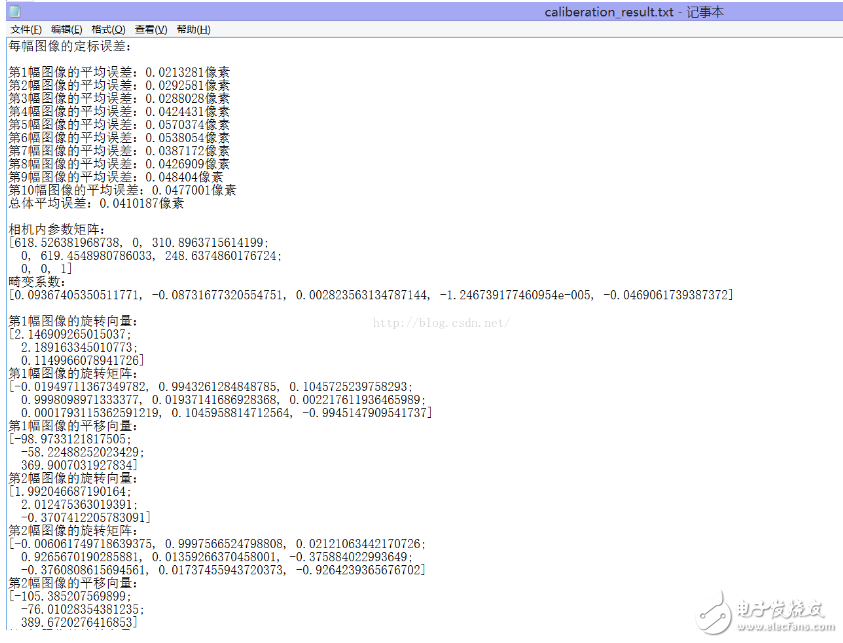
完成定标后对标定进行评价,计算标定误差并写入文件:
[cpp] view plain copy print?
std::cout《《“每幅图像的定标误差:”《《endl;
fout《《“每幅图像的定标误差:”《《endl《《endl;
for (int i=0; i《image_count; i++)
{
vector《Point3f》 tempPointSet = object_Points[i];
/**** 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 ****/
projectPoints(tempPointSet, rotation_vectors[i], translation_vectors[i], intrinsic_matrix, distortion_coeffs, image_points2);
/* 计算新的投影点和旧的投影点之间的误差*/
vector《Point2f》 tempImagePoint = corners_Seq[i];
Mat tempImagePointMat = Mat(1,tempImagePoint.size(),CV_32FC2);
Mat image_points2Mat = Mat(1,image_points2.size(), CV_32FC2);
for (int j = 0 ; j 《 tempImagePoint.size(); j++)
{
image_points2Mat.at《Vec2f》(0,j) = Vec2f(image_points2[j].x, image_points2[j].y);
tempImagePointMat.at《Vec2f》(0,j) = Vec2f(tempImagePoint[j].x, tempImagePoint[j].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err/= point_counts[i];
std::cout《《“第”《《i+1《《“幅图像的平均误差:”《《err《《“像素”《《endl;
fout《《“第”《《i+1《《“幅图像的平均误差:”《《err《《“像素”《《endl;
}
std::cout《《“总体平均误差:”《《total_err/image_count《《“像素”《《endl;
fout《《“总体平均误差:”《《total_err/image_count《《“像素”《《endl《《endl;
std::cout《《“评价完成!”《《endl;
std::cout《《“每幅图像的定标误差:”《《endl;
fout《《“每幅图像的定标误差:”《《endl《《endl;
for (int i=0; i《image_count; i++)
{
vector《Point3f》 tempPointSet = object_Points[i];
/**** 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 ****/
projectPoints(tempPointSet, rotation_vectors[i], translation_vectors[i], intrinsic_matrix, distortion_coeffs, image_points2);
/* 计算新的投影点和旧的投影点之间的误差*/
vector《Point2f》 tempImagePoint = corners_Seq[i];
Mat tempImagePointMat = Mat(1,tempImagePoint.size(),CV_32FC2);
Mat image_points2Mat = Mat(1,image_points2.size(), CV_32FC2);
for (int j = 0 ; j 《 tempImagePoint.size(); j++)
{
image_points2Mat.at《Vec2f》(0,j) = Vec2f(image_points2[j].x, image_points2[j].y);
tempImagePointMat.at《Vec2f》(0,j) = Vec2f(tempImagePoint[j].x, tempImagePoint[j].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err/= point_counts[i];
std::cout《《“第”《《i+1《《“幅图像的平均误差:”《《err《《“像素”《《endl;
fout《《“第”《《i+1《《“幅图像的平均误差:”《《err《《“像素”《《endl;
}
std::cout《《“总体平均误差:”《《total_err/image_count《《“像素”《《endl;
fout《《“总体平均误差:”《《total_err/image_count《《“像素”《《endl《《endl;
std::cout《《“评价完成!”《《endl;
显示标定结果并写入文件:
[cpp] view plain copy print?
std::cout《《“开始保存定标结果………………”《《endl;
Mat rotation_matrix = Mat(3,3,CV_32FC1, Scalar::all(0)); /* 保存每幅图像的旋转矩阵 */
fout《《“相机内参数矩阵:”《《endl;
fout《《intrinsic_matrix《《endl《《endl;
fout《《“畸变系数:\n”;
fout《《distortion_coeffs《《endl《《endl《《endl;
for (int i=0; i《image_count; i++)
{
fout《《“第”《《i+1《《“幅图像的旋转向量:”《《endl;
fout《《rotation_vectors[i]《《endl;
/* 将旋转向量转换为相对应的旋转矩阵 */
Rodrigues(rotation_vectors[i],rotation_matrix);
fout《《“第”《《i+1《《“幅图像的旋转矩阵:”《《endl;
fout《《rotation_matrix《《endl;
fout《《“第”《《i+1《《“幅图像的平移向量:”《《endl;
fout《《translation_vectors[i]《《endl《《endl;
}
std::cout《《“完成保存”《《endl;
fout《《endl;
std::cout《《“开始保存定标结果………………”《《endl;
Mat rotation_matrix = Mat(3,3,CV_32FC1, Scalar::all(0)); /* 保存每幅图像的旋转矩阵 */
fout《《“相机内参数矩阵:”《《endl;
fout《《intrinsic_matrix《《endl《《endl;
fout《《“畸变系数:\n”;
fout《《distortion_coeffs《《endl《《endl《《endl;
for (int i=0; i《image_count; i++)
{
fout《《“第”《《i+1《《“幅图像的旋转向量:”《《endl;
fout《《rotation_vectors[i]《《endl;
/* 将旋转向量转换为相对应的旋转矩阵 */
Rodrigues(rotation_vectors[i],rotation_matrix);
fout《《“第”《《i+1《《“幅图像的旋转矩阵:”《《endl;
fout《《rotation_matrix《《endl;
fout《《“第”《《i+1《《“幅图像的平移向量:”《《endl;
fout《《translation_vectors[i]《《endl《《endl;
}
std::cout《《“完成保存”《《endl;
fout《《endl;
具体的代码实现和工程详见:Calibration
运行截图:
下一节我们将使用RPP相机姿态算法得到相机的外部参数:旋转和平移。
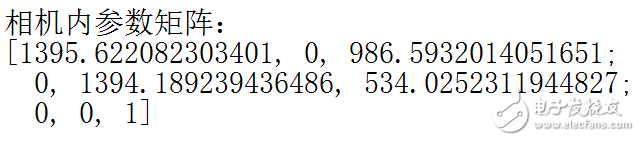
2015/11/14补充:
所有分辨率下的畸变(k1,k2,p1,p2)相同,但内参不同(fx,fy,u0,v0),不同分辨率下需要重新标定相机内参。以下是罗技C920在1920*1080下的内参:
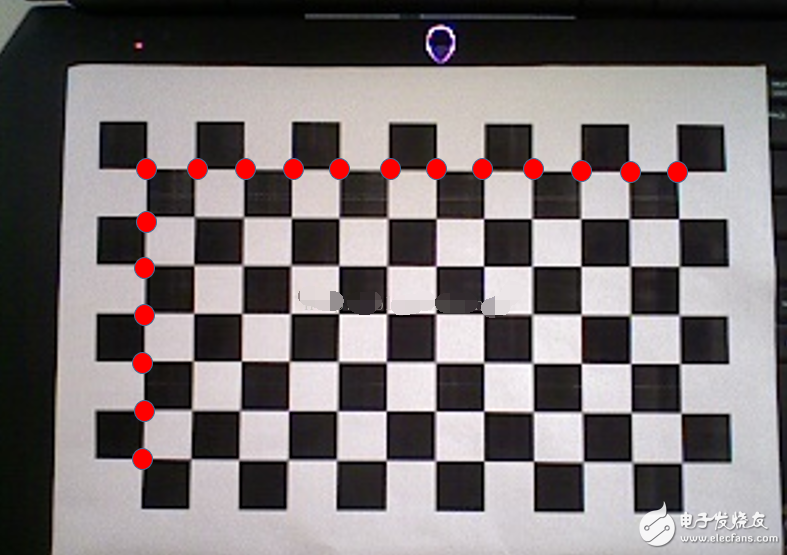
2016/08/20补充:
findChessboardCorners函数的第二个参数是定义棋盘格的横纵内角点个数,要设置正确,不然函数找不到合适的角点,返回false。如下图中的横内角点是12,纵内角点是7,则Size board_size = Size(12, 7);
- 相关推荐
- 热点推荐
- OpenCV
-
GraniStudio:相机标定例程2025-08-22 1177
-
相机标定究竟在标定什么?2023-10-18 1972
-
双目相机标定的原理和方法2023-07-03 4720
-
如何学习相机模型与标定?2023-06-01 1649
-
摄像机标定和立体标定2023-03-21 2425
-
相机标定含义(解决什么是相机标定)2022-06-21 9473
-
相机标定示例(OpenCV /C++ /matlab工具箱TOOLBOX_calib)精选资料分享2021-08-18 2129
-
HALCON的3D相机标定2020-10-31 5698
-
相机标定的逻辑和学习资料详细概述2019-06-01 5461
-
opencv单目相机标定例程2017-12-04 4034
-
labview相机标定2017-04-24 6149
-
基于OpenCV的单目摄像机标定2017-02-08 1261
-
摄相机标定介绍2016-09-22 897
-
CALIBRATION相机标定模块2015-12-10 981
全部0条评论

快来发表一下你的评论吧 !
