

新能源整车控制器VCU开发过程详解
电子说
描述
汽车轻量化带动车用改性塑料需求,汽车行业已经成为改性塑料需求增速最快的领域。改性塑料下游最大的应用领域是家电和汽车,在汽车轻量化的带动下汽车行业已经成为改性塑料需求增速最快的领域,预计未来几年国内车用改性塑料需求年平均增速将在15%以上。
一款合适的整车控制器需要正确的输入,一般车型不一样整车控制器的接口需求也不一样,因为整车控制器开发周期比较长,所以在整车控制器的研发起始阶段要考虑,所研发的整车控制器要有一定的兼容性,能适应较多车型。
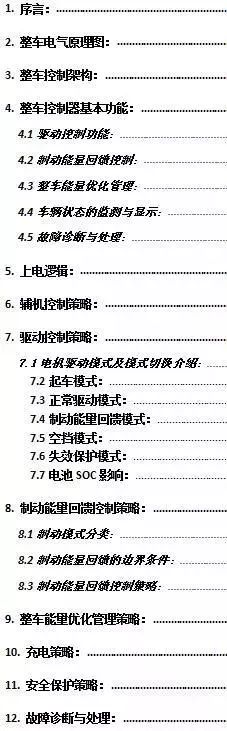
1、从输入来看:需要整车设计需求+整车控制原理图
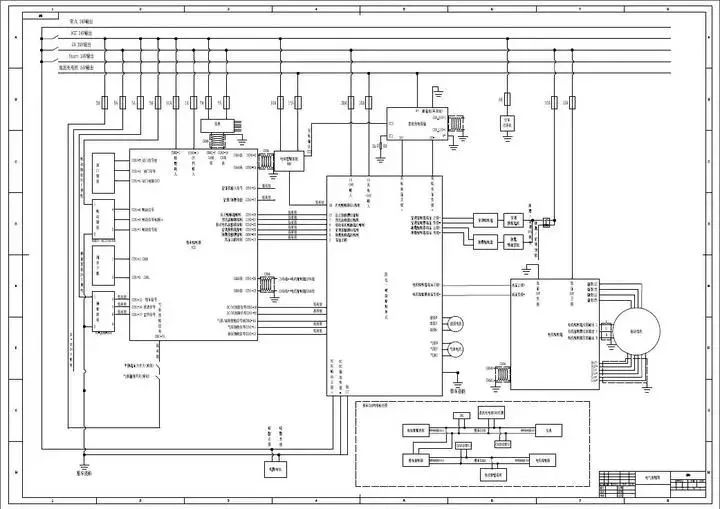
2、整车电气原理确定后,就确定了整车的控制方案,这时就可以确定整车控制器的接口功能:

3、整车控制接口定义确定后,内部功能也就确定
我们需用飞思卡尔16位双核单片机Mc9s12xep100 112脚作为主处理器,将CAN通讯收发发在协处理器XGATE中,主CPU只经行与控制策略有关的处理,这样就大大提高了控制的实时性。
原理图如下:
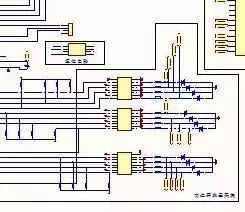
PCB图如下:
外观如图:
4、整车硬件部分完成后,接着进行软件的设计,主要包括:
A、底层软件的编写,主要是配置时钟、SPI、CAN、PIT、ECT、IO、interrupt等的寄存器。
B、BootLoader驱动,主要是CAN模块和Flash模块的配置。
C、CCP标定驱动。
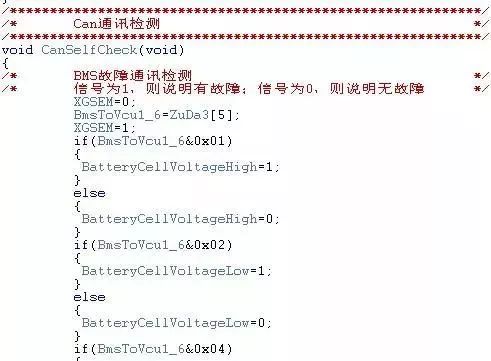
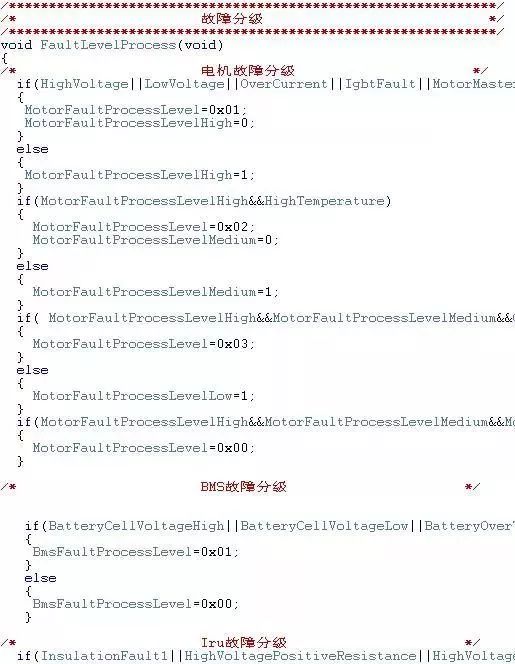
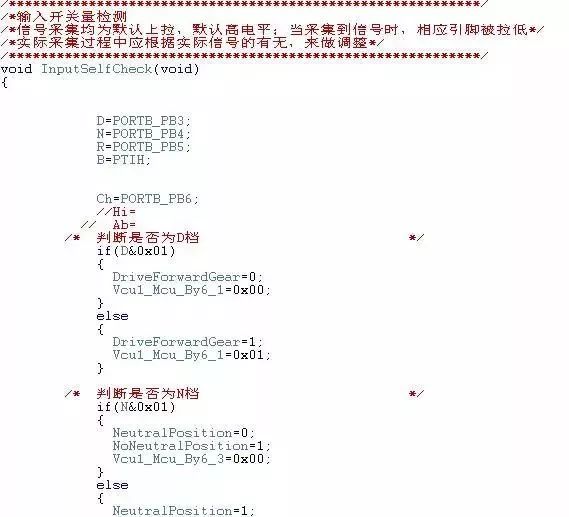
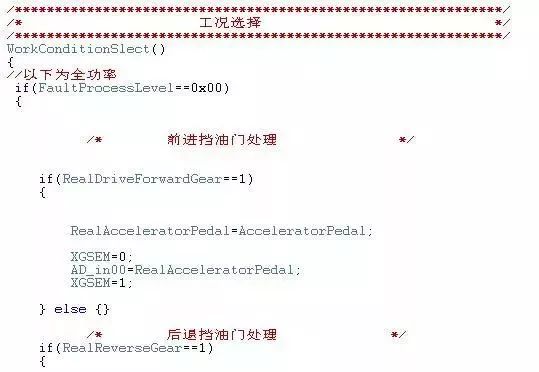
D、应用程序包括:数据采集、故障诊断、工况判断、辅机管理、通讯控制;
程序截图:
5、整车控制器调试软件:
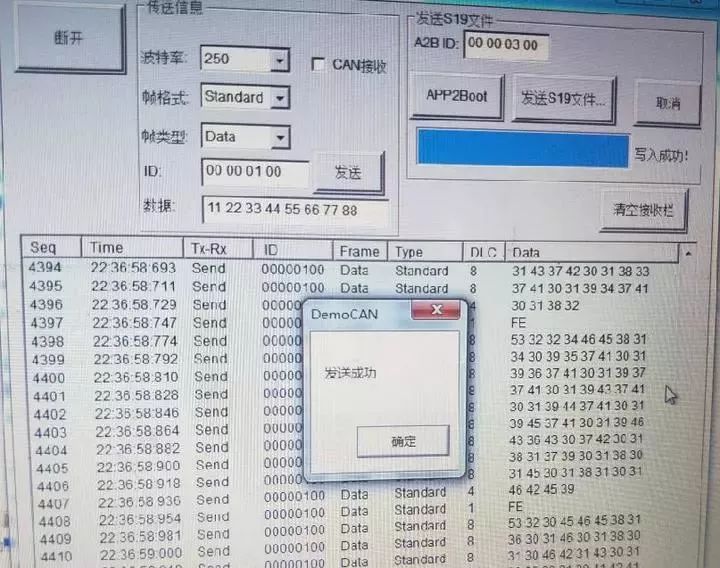
5.1、通过CAN总线进行程序下载更新的BootLoader软件,如图:
5.2、通过Busmaster监控,如图:
在编写控制软件前,应制定相应的控制策略、通讯协议:
1、通讯协议:

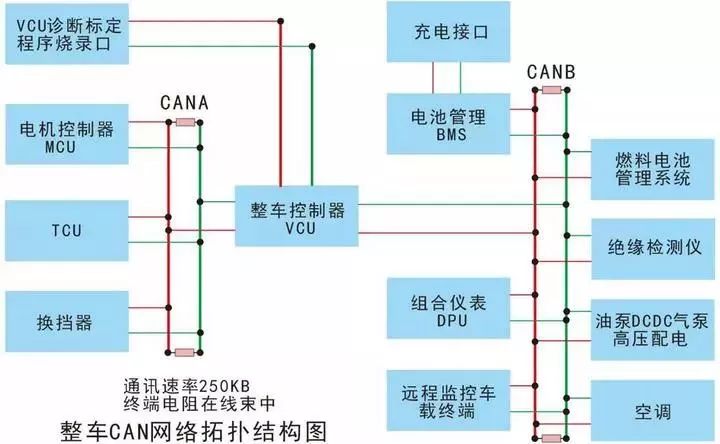
2、CAN通讯网络拓扑结构(此处预留燃料电池)
3、控制策略:
有了以上就可以就行控制软件的编写和调试的工作,调试匹配,本开发主要是针对新能源电动中巴、大巴、物流车车型,本次调试的车型为纯电动考斯特,如图:
1.调试阶段:
2.试车阶段:
试车视频
整个过程经历了1年的时间,过程中总是一个接一个的困难,记得刚开始做这个项目的时候,CAN通讯也不是很精通,急忙恶补了下,CAN底层代码也是修改了好久,还好板子的硬件部分还算比较给力,没出问题,在一些demo的基础上,进行了移植和修改,很快搭建出了具有一定功能的整车控制器,同时根据项目的需要,开发了基于CAN总线下载的Bootloader。也不断的优化换控制策略,这一块对油门、刹车的解析是一个难点,也是废了不少功夫。
经过以上,形成了如下开发包。
-
 jf_98433916
2022-03-24
0 回复 举报boot loader我也需要,邮件2944159947@qq.com 收起回复
jf_98433916
2022-03-24
0 回复 举报boot loader我也需要,邮件2944159947@qq.com 收起回复
-
 qengsoon
2019-03-04
0 回复 举报您好,我是汽车电子学习的新人,主要学习恩智浦系列的单片机,能不能参考一下您的资料,谢谢!邮箱:qengsooner@163.com 收起回复
qengsoon
2019-03-04
0 回复 举报您好,我是汽车电子学习的新人,主要学习恩智浦系列的单片机,能不能参考一下您的资料,谢谢!邮箱:qengsooner@163.com 收起回复
-
新能源汽车整车控制器(VCU)铝电解电容2025-11-10 382
-
整车控制器VCU应用层算法开发流程2024-08-27 6083
-
从0到1实现VCU:新能源汽车整车控制器2024-02-24 3076
-
VCU整车控制器的作用2023-07-19 3513
-
新能源车整车控制器(VCU)系统功能拆解2023-06-07 1615
-
新能源汽车核心技术:VCU整车控制器、MCU电机控制器、BMS电池管理系统2023-05-05 798
-
设计新能源整车控制器2021-09-07 2410
-
VCU(整车控制器)简介2021-08-31 5321
-
新能源汽车整车控制器介绍2021-01-04 5888
-
新能源汽车整车控制器VCU快速开发平台的系统组成2020-08-19 2293
-
新能源汽车整车控制器一体化的解决方案2020-06-18 1622
-
电动车整车控制器vcu2020-04-25 2554
-
整车控制器VCU EOL 测试系统2019-07-10 3045
-
整车控制器VCU基于模型开发2018-10-25 4840
全部0条评论

快来发表一下你的评论吧 !
