

TL494在电动助力车控制中的应用(TL494工作原理和引脚功能)
控制电路
描述
TL494简介
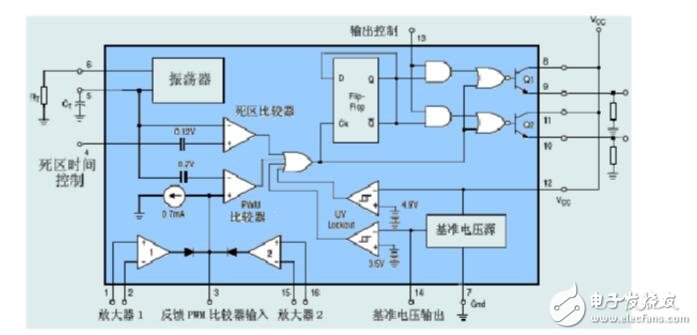
TL494是一种固定频率脉宽调制电路,它包含了开关电源控制所需的全部功能,广泛应用于桥式单端正激双管式、半、全桥式开关电源。
TL494工作原理
TL494是一个固定频率的脉冲宽度调制电路,内置了线性锯齿波振荡器,振荡频率可通过外部的一个电阻和一个电容进行调节,其振荡频率如下:

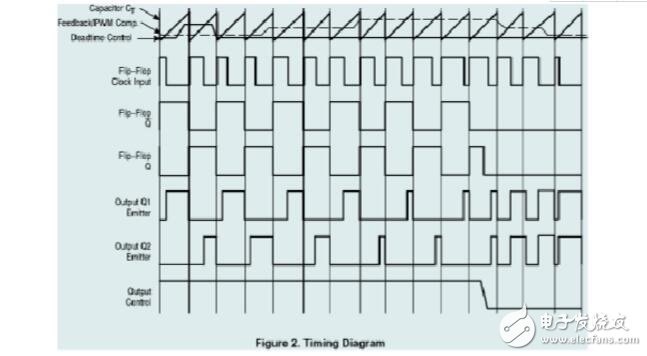
输出脉冲的宽度是通过电容CT上的正极性锯齿波电压与另外两个控制信号进行比较来实现。功率输出管Q1和Q2受控于或非门。当双稳触发器的时钟信号为低电平时才会被选通,即只有在锯齿波电压大于控制信号期间才会被选通。当控制信号增大,输出脉冲的宽度将减小。
控制信号由集成电路外部输入,一路送至死区时间比较器,一路送往误差放大器的输入端。死区时间比较器具120mV的输入补偿电压,它限制了最小输出死区时间约等于锯齿波周期的4%,当输出端接地,最大输出占空比为96%而输出端接参考电平时,占空比为48%。当把死区时间控制输入端接上固定的电压(范围在0—3.3V之间)即能在输脉冲上产生附加的死区时间。
脉冲宽度调制比较器为误差放大器调节输出脉宽提供了一个手段:当反馈电压从0.5V变化到3.5时,输出的脉冲宽度区确定的最大导通百分比时间中下降到零。两个误差放大器具有从-0.3V到(Vcc-2.0)的共模输入范围,这可能从电出电压和电流察觉得到。误差放大器的输出端常处于高电平,它与脉冲宽度调制器的反相输入端进行“或”运算,正电路结构,放大器只需最小的输出即可支配控制回路。
当比较器CT放电,一个正脉冲出现在死区比较器的输出端,受脉冲约束的双稳触发器进行计时,同时停止输出Q1和Q2的工作。若输出控制端连接到参考电压源,那么调制脉冲交替输出至两个输出晶体管,输出频率等于脉冲振器的一半。如果工作于单端状态,且最大占空比小于50%时,输出驱动信号分别从晶体管Q1或Q2取得。输出变压器个反馈绕组及二极管提供反馈电压。在单端工作模式下,当需要更高的驱动电流输出,亦可将Q1和Q2并联使用,这时需将输出模式控制脚接地以关闭双稳触发器。这种状态下,输的脉冲频率将等于振荡器的频率。
TL494引脚图及引脚介绍
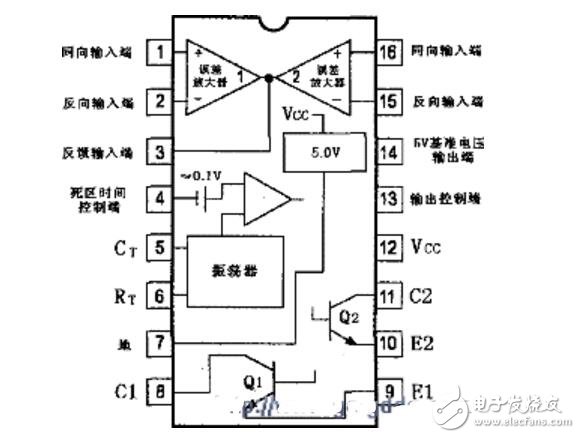
1脚/同相输入:误差放大器1同相输入端。
2脚/反相输入:误差放大器1反相输入端。
3脚/补偿/PWM比较输入:接RC网络,以提高稳定性。
4脚/死区时间控制:输入0-4VDC电压,控制占空比在0-45%之间变化。同时该因脚也可以作为软启动端,使脉宽在启动时逐步上升到预定值。
5脚/CT:振荡器外接定时电阻。
6脚/RT:振荡器外接定时电容。振荡频率:f=1/RTCT。
7脚/GND:电源地。
8脚/C1:输出1集电极。
9脚/E1:输出1发射极。
10脚/E2:输出2发射极。
11脚/C2:输出2集电极。
12脚/Vcc:芯片电源正。7-40VDC。
13脚/输出控制:输出方式控制,该脚接地时,两个输出同步,用于驱动单端电路。接高电平时,两个输出管交替导通,可以用于驱动桥式、推挽式电路的两个开关管。
14脚/VREF:5VDC电压基准输出。
15脚/反相输入:误差放大器2反相输入端。
16脚/同相输入:误差放大器2同相输入端。
tl494应用电路
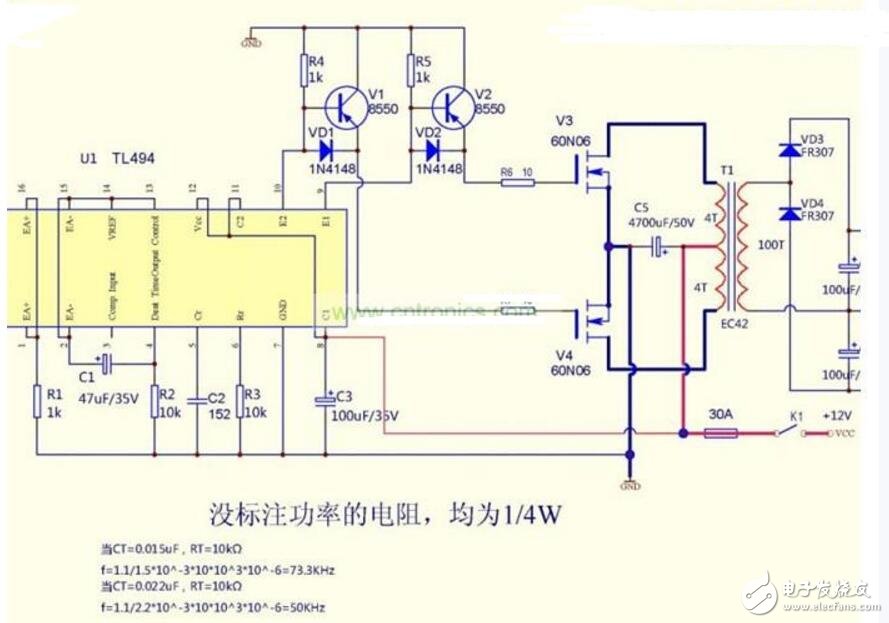
上图是个带稳压和限流的图纸,只是在第一幅图上增加了两个两个误差放大器的应用(一个限流保护用,一个稳压用).TL494两个误差放大器允许独立使用,但独立使用时要和tl494的3脚接好RC网络,上图中的c6和c7就起这个作用。
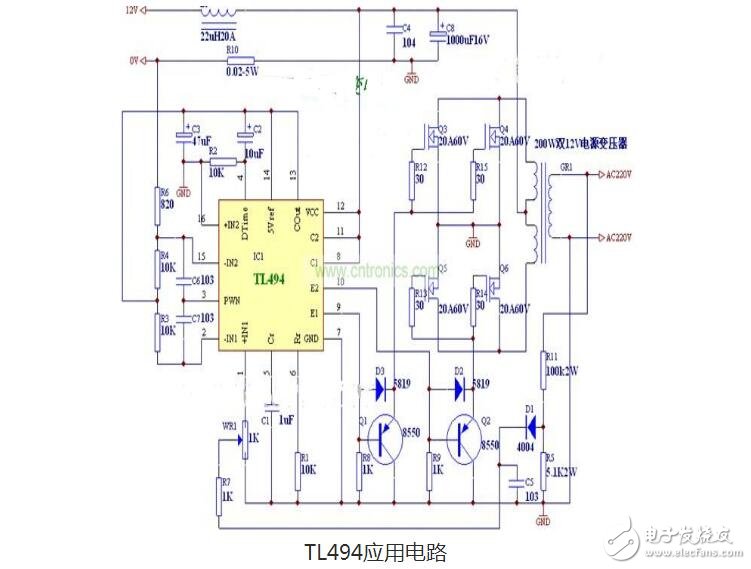
R3提供场管的开启电压,R4和C1起到电流缓冲作用。网上介绍很多了,电瓶输入电压接反的话几乎不会有电流通过。接入正确的话,等效一个小内阻的电阻串联其中。内阻由所选的场管决定,比如IRF3025是0.008欧姆两个并联就等效一个0.004欧姆的电阻了。将这个电路的S.D两极代替电阻R10这样就变成限流100A的电路了。考虑不需要这么大的电流就把R4和R6的分压取在0.2V,(4.7k和220)这样限制电流在50A左右。
电动助力车控制电路的设计
电动车控制电路最基本的功能,就是通过骑者对控制手柄的旋转,实现对电机脉冲调宽式无级调速,是一个开环的速度控制系统。结构较为简单(有刷电机)。目前,电动助力车较为广泛采用动力型铅酸密封免维护电池。其特点:能量密度较低、续驶能力及寿命有一个限制。但以其价格较为低廉而得到广泛应用。在控制电路设计时应考虑过流保护、欠压保护、欠速保护等。为使电路结构简单、成本低,通过骑者细心操作可省去欠速保护电路,不会对蓄电池供电造成严重影响。控制电路方框图见图 &。
几点说明:
功率驱动管一般选用MOSEET场效应管,其输入阻抗很高,可直接由TL494晶体三极管推动.TL494的13脚用来控制输出模式。该端为高电平时,两路输出分别由触发器Q1和Q2端控制,形成双输出方式,即推挽型输出。此时,PWM输出脉冲频率为振荡频率的一半,最大占空比为 48%;该端为低电平时,触发器不起作用,两路输出相同,其频率与振荡器频率相同,最大占空比为98%。此时,两路可以并联输出,以增大驱动能力(约400mA)。振荡频率在10khz到20khz范围内即可,主要取决于MOSFET的开关速度和开关损耗。
两个误差放大器的同相输入端和反相输入端分别接至基准信号(从TL494的14脚分压后取得)和反馈信号作为过流、欠压比较器,实现保护功能。值得一提的是过流采样电阻值不宜过大,以便减少不必要的损耗。取样电压较低时,易产生漂移,设计时应考虑。
电动助力车在使用过程中,控制手柄一旦损坏或与控制器连接电缆断开,控制就会失灵,当接通电源时,电机就会转动造成事故。因此,在电路设计中增加一个控制手柄保护电路显得非常必要。电动助力车在全天候条件下行驶,尤其是在雨季或南方湿度较大的气候条件下行驶,控制器易受潮而损坏,在结构设计上采用环氧密封灌注或硅胶密封处理是行之有效的办法之一。
结束语
本文所述的驱动电路结构简单,基本满足了电动助力车的要求。虽然采取了保护措施,对延长电池的寿命起到了一定的作用,但还远远不够。电池的续驶能力与电机和控制器的效率、负荷、路况、气候、环境温度等诸多因素有关。最重要的是不要让电池长期过放电流。为此,车手在起动时,不要零起步,上坡时,脚踏电动同时进行,有利于延长蓄电池的使用寿命。
-
tl494开关电源维修和原理2023-12-26 16447
-
TL494工作原理及典型电路2022-11-09 54574
-
什么是TL494恒流电源2021-10-29 2489
-
TL494 PWM控制器(最高200 kHz)2019-07-29 3661
-
tl494的仿真与管脚问题及中文资料2018-08-29 4592
-
TL494控制BUCK型开关电源电路2017-12-05 54894
-
TL494在逆变器中的典型应用2017-11-10 21505
-
TL494控制产生PWM信号的问题2016-04-15 9730
-
TL494/781532012-09-08 3427
-
TL494开关集成电路原理及应用2009-12-29 6596
-
TL494管脚分配图2009-10-14 5995
-
TL494 电压驱动型脉宽调制器2009-07-21 6810
-
tl494各引脚功能电压2008-03-09 39546
-
tl494引脚定义图2008-01-31 25916
全部0条评论

快来发表一下你的评论吧 !
