

应用于低速应用所需的 DAC的详细分析
转换器
描述
当选择数模转换器 (DAC) 时,设计师可以从种类繁多的 IC 中选择。DAC 可以针对具体的应用划分成很多不同类别。不过,DAC 的划分也可以简化,仅分成 DC 或低速调节所需的 DAC和产生高速波形所需的 DAC。 本文专注于低速应用所需的 DAC,而无论该应用是低分辨率还是高分辨率、是粗略调节还是精细调节。
就选择低速 DAC 而言,决定设计是闭环、开环或“设定后便不需再过问”的系统是很重要。每一种设计都需要一个具某些关键性能规格的 DAC。
闭环系统
闭环系统包括一条反馈通路,以检测和校准任何误差。传感器根据诸如伺服电动机、流量阀或温度检测单元等的物理参数监视输出。然后传感器将数据馈送回控制器,而控制器则利用这个信息决定是否需要校正。
DAC 和模数转换器 (ADC) 是位于闭环系统核心的关键组件。DAC 用在前馈通路中以调节系统,ADC 用在反馈通路中,以监视这些调节的效果。它们一起施加和检测模拟控制信号,以真实地调节它们控制的参数。
电动机控制是这类闭环系统的一个例子,如图 1 中详细说明的那样。首先,将一个想要的输出 (设定点) 加到控制器上,控制器对这个输出和反馈信号进行比较。如果需要校正,那么控制器会调节 DAC 的输入编码,然后 DAC 在其输出端产生一个模拟电压。该 DAC 的输出电压通过一个功率放大器放大,以给电动机提供所需的驱动电流。
在这个闭环系统的下一级,用一个转速计测量电动机的旋转速度。旋转信号是该闭环系统的实际输出或可变过程。ADC 将该转速计的输出数字化,并将数据发送到控制器,在控制器中,由算法决定是否需要在 DAC 输出以及最终的电动机上进行任何校正。采用这种方式,误差被降到可接受的水平。理想情况下,反馈允许闭环系统消除所有误差,从而有效地限制噪声、温度、外力或其他不想要的信号等任何误差来源的影响。
闭环系统的性能取决于准确的反馈通路,包括传感器和 ADC。本质上,反馈通路补偿了前馈通路的误差。因为 DAC 在前馈通路中,其积分非线性 (INL) 误差就自动得到了补偿。INL 误差是 DAC 输出端实际的传递函数与理想传递函数之间的偏差。不过,DAC 必须有良好的差分非线性 (DNL),并且必须相对于数据表中规定的位数呈单调性。DNL 误差是 DAC 模拟输出端的实际电压变化与理想电压步进 (等于 DAC 输入编码中 1 个最低有效位 (LSB) 步进) 之差。单调的 DAC 意味着,模拟输出始终随着数字编码的提高而提高或保持与其相同 (反之亦然)。始终大于 -1LSB 的 DNL 规格意味着单调性。图 2 显示 DAC 模拟输出电压相对于 DAC 输入编码的传递函数。
如果 DAC 不是单调的,那么会存在一个负反馈变成正反馈的区域。这可能导致振荡,而振荡最终可能毁坏电动机。
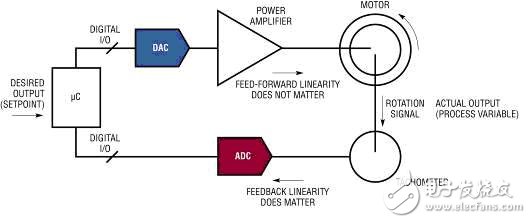
图 1:闭环系统举例
DESIRED OUTPUT (SETPOINT):想要的输出 (设定点)
DIGITAL I/O:数字 I/O
POWER AMPLIFIER:功率放大器
FEED-FORWARD LINEARITY DOES NOT MATTER:前馈线性度不重要
MOTOR:电动机
ROTATION SIGNAL:旋转信号
ACTUAL OUTPUT (PROCESS VARIABLE):实际输出 (可变过程)
TACHOMETER:转速计
FEEDBACK LINEARITY DOES MATTER:反馈线性度确实很重要
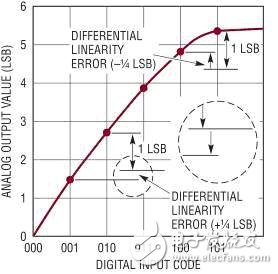
图 2:DNL 传递函数
ANALOG OUTPUT VALUE (LSB):模拟输出值 (LSB)
DIFFERENTIAL LINEARITY ERROR (-1/4 LSB):差分线性误差 (-1/4 LSB)
DIGITAL INPUT CODE:数字输入编码
-
机房托管费详细分析2025-02-28 1616
-
电子工程师需要掌握的20个模拟电路的详细分析2023-09-28 749
-
电子工程师必须掌握的20个模拟电路详细分析2023-09-27 1092
-
请问一下怎样对stm32的启动代码进行详细分析呢2021-11-26 1728
-
详细分析了VTIM和VMIN的功能2021-11-05 1910
-
详细分析stm32f10x.h2021-08-05 1382
-
正激有源钳位的详细分析2021-06-16 1886
-
详细分析一下USB协议2021-05-24 2139
-
物联网的产业生态是怎样的详细分析概述2018-12-08 6016
-
Buck变换器原理详细分析2017-09-15 1700
-
uboot代码详细分析2016-01-29 5763
-
工程师应该掌握的20个模拟电路(详细分析及参考答案).pdf2013-04-07 7810
-
DVI接口详细分析2012-08-11 8485
-
电子整流器工作原理详细分析2010-02-27 26020
全部0条评论

快来发表一下你的评论吧 !
