

fifo存储器是什么_fifo存储器有什么特点
存储技术
描述
1.FIFO存储器
FIFO( First In First Out)简单说就是指先进先出。由于微电子技术的飞速发展,新一代FIFO芯片容量越来越大,体积越来越小,价格越来越便宜。作为一种新型大规模集成电路,FIFO芯片以其灵活、方便、高效的特性,逐渐在高速数据采集、高速数据处理、高速数据传输以及多机处理系统中得到越来越广泛的应用。
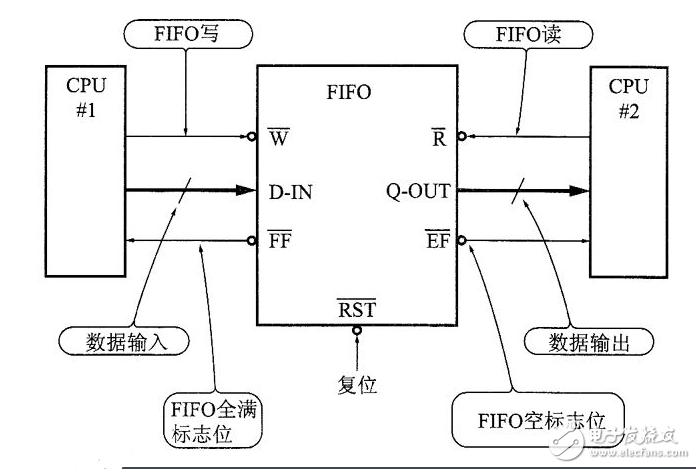
在系统设计中,以增加数据传输率、处理大量数据流、匹配具有不同传输率的系统为目的而广泛使用FIFO存储器,从而提高了系统性能。FIFO存储器是一个先入先出的双口缓冲器,即第一个进入其内的数据第一个被移出,其中一个存储器的输入口,另一个口是存储器的输出口。对于单片FIFO来说,主要有两种结构:触发导向结构和零导向传输结构。触发导向传输结构的FIFO是由寄存器阵列构成的,零导向传输结构的FIFO是由具有读和写地址指针的双口RAM构成。
2.什么情况下用FIFO?
FIFO一般用于不同时钟域之间的数据传输,比如FIFO的一端时AD数据采集,另一端时计算机的PCI总线,假设其AD采集的速率为16位 100K SPS,那么每秒的数据量为100K×16bit=1.6Mbps,而PCI总线的速度为33MHz,总线宽度32bit,其最大传输速率为1056Mbps,在两个不同的时钟域间就可以采用FIFO来作为数据缓冲。另外对于不同宽度的数据接口也可以用FIFO,例如单片机位8位数据输出,而DSP可能是16位数据输入,在单片机与DSP连接时就可以使用FIFO来达到数据匹配的目的。
3.FIFO的一些重要参数
FIFO的宽度:也就是英文资料里常看到的THE WIDTH,它指的是FIFO一次读写操作的数据位,就像MCU有8位和16位,ARM 32位等等,FIFO的宽度在单片成品IC中是固定的,也有可选择的,如果用FPGA自己实现一个FIFO,其数据位,也就是宽度是可以自己定义的。
FIFO的深度:THE DEEPTH,它指的是FIFO可以存储多少个N位的数据(如果宽度为N)。如一个8位的FIFO,若深度为8,它可以存储8个8位的数据,深度为12 ,就可以存储12个8位的数据,FIFO的深度可大可小,个人认为FIFO深度的计算并无一个固定的公式。在FIFO实际工作中,其数据的满/空标志可以控制数据的继续写入或读出。在一个具体的应用中也不可能由一些参数算数精确的所需FIFO深度为多少,这在写速度大于读速度的理想状态下是可行的,但在实际中用到的FIFO深度往往要大于计算值。一般来说根据电路的具体情况,在兼顾系统性能和FIFO成本的情况下估算一个大概的宽度和深度就可以了。而对于写速度慢于读速度的应用,FIFO的深度要根据读出的数据结构和读出数据的由那些具体的要求来确定。
满标志:FIFO已满或将要满时由FIFO的状态电路送出的一个信号,以阻止FIFO的写操作继续向FIFO中写数据而造成溢出(overflow)。
空标志:FIFO已空或将要空时由FIFO的状态电路送出的一个信号,以阻止FIFO的读操作继续从FIFO中读出数据而造成无效数据的读出(underflow)。
读时钟:读操作所遵循的时钟,在每个时钟沿来临时读数据。
写时钟:写操作所遵循的时钟,在每个时钟沿来临时写数据。
读指针:指向下一个读出地址。读完后自动加1。
写指针:指向下一个要写入的地址的,写完自动加1。
读写指针其实就是读写的地址,只不过这个地址不能任意选择,而是连续的。
4.FIFO的分类
根均FIFO工作的时钟域,可以将FIFO分为同步FIFO和异步FIFO。同步FIFO是指读时钟和写时钟为同一个时钟。在时钟沿来临时同时发生读写操作。异步FIFO是指读写时钟不一致,读写时钟是互相独立的。
5.FIFO设计的难点
FIFO设计的难点在于怎样判断FIFO的空/满状态。为了保证数据正确的写入或读出,而不发生益处或读空的状态出现,必须保证FIFO在满的情况下,不能进行写操作。在空的状态下不能进行读操作。怎样判断FIFO的满/空就成了FIFO设计的核心问题。由于同步FIFO几乎很少用到,这里只描述异步FIFO的空/满标志产生问题。
说到此,我们已经清楚地看到,FIFO设计最关键的就是产生空/满标志的算法的不同产生了不同的FIFO。但无论是精确的空满还是保守的空满都是为了保证FIFO工作的可靠。
-
stm32不是有暂存功能吗 为啥做示波器还要接个FIFO存储器2017-12-04 4966
-
FIFO存储器的相关资料分享2022-01-18 1114
-
通用存储器VHDL代码库2008-05-20 976
-
通用存储器 包括各种类型存储器的VHDL描述,如FIFO,双2009-06-14 749
-
LOGIC开始派送帧缓冲器/FIFO存储器样品2006-03-13 912
-
光存储器,光存储器特点和常用类型有哪些?2010-03-20 6906
-
赛普拉斯推出72 Mbit先进先出(FIFO)存储器2011-06-17 3101
-
存储器分类及各自特点有哪些2017-12-06 19298
-
fifo存储器芯片型号有哪些2018-04-08 26530
-
基于Verilog HDL语言与双体存储器的交替读写机制实现32X8 FIFO设计2018-12-30 4578
-
TMS320C67系列DSP的EMIF与异步FIFO存储器的接口设计详细资料介绍2019-07-31 1766
-
FIFO存储器的尺寸图免费下载2019-08-15 997
-
一种基于FPGA内部存储器的适合音频解嵌的高效异步FIFO设计2020-01-29 1391
-
存储器和新兴非易失性存储器技术的特点2020-06-09 1809
-
FIFO存储器的种类、IP配置及应用2026-01-13 648
全部0条评论

快来发表一下你的评论吧 !
