

利用超声波无接触测距的汽车倒车雷达系统
模拟技术
描述
1 引言
近年来,随着汽车产业的迅速发展和人们生活水平的不断提高,我国的汽车数量正逐年增加。同时汽车驾驶人员中非职业汽车驾驶人员的比例也逐年增加。在公路、街道、停车场、车库等拥挤、狭窄的地方倒车时,驾驶员既要前瞻,又要后顾,稍微不小心就会发生追尾事故。据相关调查统计,15%的汽车碰撞事故是因倒车时汽车的后视能力不良造成的。因此。增加汽车的后视能力,研制汽车后部探测障碍物的倒车雷达便成为近些年来的研究热点。安全避免障碍物的前提是快速、准确地测量障碍物与汽车之间的距离。为此,设计了以单片机为核心,利用超声波实现无接触测距的倒车雷达系统。
2整体设计及原理
超声波一般指频率在20 kHz以上的机械波,具有穿透性强,衰减小,反射能力强等特点。工作时,超声波发射器不断发射出一系列连续脉冲,给测量逻辑电路提供一个短脉冲。最后由信号处理装置对接收的信号依据时间差进行处理,自动计算出车与障碍物之间的距离。超声波测距原理简单,成本低,制作方便,但其传输速度受天气影响较大,不能精确测距;另外,超声波能量与距离的平方成正比衰减,因此,距离越远,灵敏度越低,从而使超声波测距方式只适用于较短距离。目前,国内外一般的超声波测距仪,其理想的测量距离
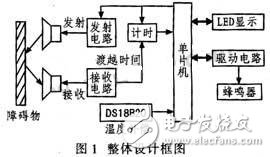
为4~5 m,因此大都用于汽车倒车雷达等近距离测距中。该倒车雷达系统采用单片机控制,如图1所示。利用超声波实现无接触测距,并考虑测量环境温度对超声波波速的影响,而且通过温度补偿法对速度进行校正。使用由集成数字传感器DS18B20构成的温度测量电路,可直接读取温度值,再根据温度补偿得出超声波在某一温度下的波速,由单片机计数脉冲个数获得传播时间,根据超声波测距原理测得并显示距离,再根据显示的距离控制蜂鸣器的发声频率。
2.1超声波测距原理
目前,利用超声波测距的方法有相位检测法、声波幅值检测法、渡越时间检测法三种。相位检测的精度高,但检测范围有限;声波幅值检测易受反射波的影响;渡越时间检测工作方式简单、直观,在硬件控制和软件设计容易实现,其原理是检测从发射传感器发射超声波到经气体介质传播后接收传感器接收超声波的时间差,即渡越时间t。距离s=ct/2(c为声速),t可由单片机计脉冲个数的方法实现。
2.2温度与声速的关系
由于超声波也是一种声波,其声速v与温度T有关。表1列出了几种不同温度下的声速。使用时,若温度变化不大,则可视声速基本不变;若测距精度要求很高,则应通过温度补偿法予以校正。
一般情况下,利用v=331+0.60T进行温度补偿,以适应不同温度下的工作要求。表2给出补偿后声速与温度的关系。可以看出,0℃以下时声速值完全吻合;0℃以上最大误差不超过5%。
由上述分析可知,温度测量的精度不仅直接影响了速度的测量精度,而且也间接影响距离的测量精度,所以温度的测量很关键。
3硬件电路设计
倒车雷达系统主要由超声波发射电路、超声波接收电路、温度测量电路及显示报警电路构成。
3.1超声波发射电路
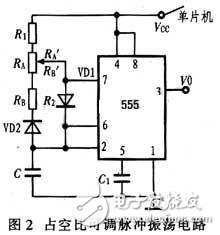
在单片机控制下,使脉冲发生器输出超声波。脉冲发生器由555构成,其连接如图2所示。7引脚和6、2引脚的上下为R和C;中间R与RP并联,RA=Rl+RA‘’‘’‘’‘’,RA=R2+RB‘’‘’‘’‘’,且T1=0.693RAC,T2=0.693RBC,通过调节RA和RB的阻值,实现输出波形的占空比的可调。但是,这里需要50%占空比的方波,因此调节滑动变阻器,使T1=T2,频率的计算公式为:
f=1.443/(RA+RB)C (1)
合理选择R,C可使超声波获得40 kHz的输出脉冲。因为超声波的传输要有一段距离,为了使信号便于传输,通常要在发射电路的后面加上一个调制电路。
3.2超声波接收电路
因为超声波测距只用于近距离,当距离较远时,衰减较为严重,反射回来的信号相对也比较微弱,因此接收端应先设置一个放大电路,然后通过检波电路对其输出信号进行解调,最后对检波输出信号进行比较整形。
超声波接收电路的需要考虑以下几个方面:
(1)环境噪声、干扰、温度等影响
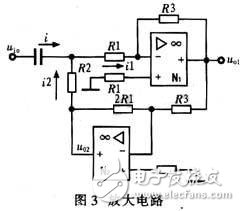
图 3给出放大电路图。它选择一个自举组合电路,该电路通过减小向输入回路索取的电流来提高输入阻抗,其值为Rin=R1R2/(R1-R2),该值可根据前序电路确定R1和R2,使其与前序电路级间匹配。电路中用到的是反相比例放大电路,增益比较稳定,通常K=-R3/R1不会引起自激,可降低干扰对电路的影响。因此,合理地选择R3和R1,可使输出电压达到V级。
(2)检波精度
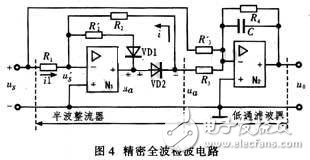
设计中采用了图4所示的全波精密检波电路。为了提高电路的信噪比,衰减掉不需要的频率信号,在输人端加上谐振回路。二极管VD1和VD2选择高频性能比较好的IN60。这种检波方式可以使二极管的死区电压和非线性得到很大的改善。
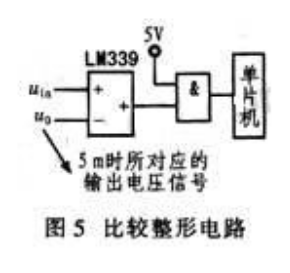
(3)比较整形电路
图 5示出比较整形电路。首先在静态下测量距离等于5 m,检波器的输出电压值(该电压同样是经过放大检波电路得到的),并以此电压值作为比较器的参考电压uR。比较器选用LM339,具有失调电压小,电源电压范围宽,其单电源电压为2~36 V,双电源电压为±1~±18 V,而且对比较信号源的内阻限制较宽等优点。对于LM339来说,当两个输入端电压差大于10 mV时,就能确保其输出从一种状态可靠地转换到另一种状态。因此,把LM339用在弱信号检测等场合是比较理想的。一般情况下,比较电路的输出波形的上升沿和下降沿都有延时,可在其后面加一个与门,以改善输出特性。将比较整形电骼的输出送到单片机,对脉冲计数,得到渡越时间。单片机选AT89C52。
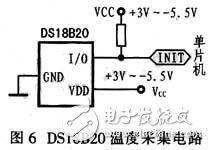
3.3温度测量电路
目前,大多数温度测控系统在检测温度时,都采用温度传感器将温度转化为电量,经信号放大电路放大到适当的范围,再由A/D转换器转换成数字量来完成。这种电路结构复杂,调试繁杂,精度易受元器件参数的影响。为此,利用一线性数字温度计即集成温度传感器DS18B20 和单片机,构成一个高精度的数字温度检测系统。DS18B20数字式温度传感器与传统的热敏电阻温度传感器不同,能够直接读出被测温度值,并且可根据实际要求,通过简单的编程,实现9~12位的 A/D转换。因而,使用DS18B20可使系统结构更简单,同时可靠性更高。温度测量范围从-55~+125℃,在-10~+85℃检测误差不超过 0.5℃,而在整个温度测量范围内具有±2℃的测量精度,其电路连接如图6所示。
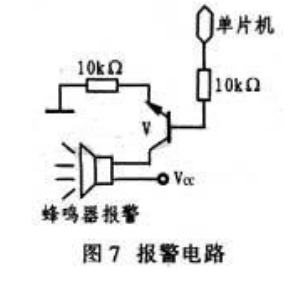
3.4显示及报警电路
显示电路采用4位共阳LED数码管,码段由74LS244驱动电路驱动;驱动电路由PNP晶体管8550驱动。图7给出报警电路。它采用晶体管驱动。
4结语
该倒车雷达系统利用超声波实现了无接触测距;采用高精度温度传感器实现了对超声波测距系统的温度测量和补偿,即根据v=331+0.60T,对声速进行了补偿,提高了测量精度。具有电路设计简单,价格便宜,测量精度比较高的优点,目前已批量生产。
-
基于51单片机的车辆倒车雷达报警系统,HC-SR04超声波测距,全套资料2024-03-19 1898
-
利用AT89C51单片机、超声波传感器测距实现超声波倒车雷达2023-11-17 551
-
怎样去设计一种基于超声波测距仪的倒车雷达电路呢2021-12-31 3742
-
基于超声波测距的倒车报警系统的设计资料分享2021-12-02 1445
-
如何利用超声波传感器实现无接触式测距?2021-05-17 2639
-
怎么实现基于超声波检测的倒车雷达设计?2021-05-14 2001
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 20929
-
超声波测距原理及超声波倒车雷达的设计2017-11-15 4095
-
基于STM32和超声波测距的倒车雷达预警系统设计_韩韧2017-03-19 2117
-
超声波测距系统毕设2016-04-18 6316
-
基于51单片机用HC-RS04超声波测距的汽车倒车雷达系统C程序2016-03-28 9503
-
基于单片机的超声波测距倒车雷达系统设计2016-03-23 1298
-
超声波倒车雷达的设计2015-01-09 4309
-
基于超声波测距的倒车雷达系统设计2010-12-17 1094
全部0条评论

快来发表一下你的评论吧 !
