

汽车dsc是怎么控制系统?汽车dsc控制系统原理分析
汽车电子
描述
汽车dsc是怎么控制系统
ESP电子稳定系统已经不再是高端主动安全设备,越来越多的车型已经将其列为标准配置。ESP电子稳定系统的效果是显而易见的,它通过传感器对车辆行驶状态、驾驶员驾驶状态和行为进行实时监控,经过分析处理后对四个车轮转速进行分别控制,从而对车辆起到稳定作用。不过,正是由于ESP电子稳定程序的自动介入,中规中矩的行驶姿态使得驾驶乐趣受到影响。
开过带有ESP电子稳定系统车型的人都应该会有弯道中缺乏激情的感觉,其实正是默默无闻工作的ESP不断精确的对车轮进行制动控制消除了人们所期待的驾驭感。以运动感为卖点的宝马自然不会被ESP束缚住,宝马开发的DSC主动稳定控制系统可谓是为有些沉闷的ESP电子稳定系统增添了不少活力。
在正常模式下,宝马DSC主动稳定控制系统与大多数的ESP电子稳定系统一样,但是当车主通过中控台上的DTC按钮激活DTC模式后,车辆的表现则会大不相同。DTC的功能是增加或降低后轮转速的辅助系统。由于宝马车型都是后轮驱动,在激活DTC后,DSC主动稳定控制系统的响应极限会有所延长,同时车辆的后轮驱动力也随之增大,在蛇行弯道时会出现很容易出现甩尾的动态表现,因此有了DTC的帮助,车主可以在DSC的安全保护下同时享受到运动驾驶体验。
DSC具有多种辅助功能
激活DTC并不意味着信马由缰,宝马DSC动态稳定控制系统还有一项特殊的功能:CBC弯道制动控制系统。它能够在弯道中进行轻微制动,通过非对称的制动力控制以消除后驱车转向过度的趋势。因此当驾驶宝马甩尾时,会发现非常得心应手,其实这并非是驾驶技术了得,而是先进的DSC动态稳定控制系统在暗中帮助。
除此之外,宝马DSC主动稳定控制系统还集成了其他几项使用的辅助功能。例如,双级制动蹄摩擦片磨损指示器,它可以自动计算制动器摩擦片的剩余里程,可以精确确定需要更换制动摩擦片的时间;制动器干燥功能,它通过雨量探测器判断雨量,使制动摩擦片与制动盘在行驶过程中自动发生轻微接触,利用制动时产生的热量蒸发吸附在制动盘上的水膜;坡道起步辅助功能,这项功能有些类似ESP电子稳定程序中具有的AutoHold功能,它可以在斜坡解除制动时依然保持原位,不会向后滑行以确保舒适而平稳地起步。有了DSC提供的这项功能,即便是手动档车型也不需要使用手刹便可以轻松的实现坡道起步。
DSC动态稳定控制系统
性能类似德国博世公司的ESP(电子稳定系统)可在汽车高速运动时,提供良好的操控性,防止车辆发生甩尾或者漂移现象,从而获得精准的操控性。是电子主动安全保护系统的一种。由于ESP名称已经被德国博世公司注册。故其他公司开发的电子稳定系统只能使用其他名称。如DSC。
ESP工作原理
汽车失稳原因分析
由于汽车行驶的工况十分复杂,如路面摩擦系数的变化,汽车的制动驱动,汽车受到侧向风干扰等,都可能引起汽车失稳。
汽车的转向运动是由方向盘上施加转角以后使前轮产生侧偏角和侧向力,引起汽车横摆运动;汽车的横摆运动导致后轮也产生侧偏角,进而产生侧向力。前、后轮的侧向力提供了汽车转向的向心力。汽车在稳定行驶时,例如,高附着路面下转向侧向加速度较小时,轮胎侧偏角较小,与轮胎侧向力近似成线性关系,轮胎特性处于线性区内。在这种情况下汽车的质心侧偏角也是很小的,接近于零,按照预期轨迹行驶。当汽车发生失稳的情况时,例如进行紧急转弯时,离心力变大,轮胎处于非线性区,侧偏角和轮胎产生的侧向力不再成线性关系,侧向力逐渐饱和,路面不能提供足够的侧向力,不再按照预期轨迹行驶,失去控制。当前轴侧向力饱和时,汽车出现不足转向特性,前轴发生侧滑,车辆出现飘移现象,车辆实际的转弯半径比驾驶员预期的要大,汽车偏离预期轨迹;当后轴侧向力饱和时,汽车出现过度转向特性,后轴发生侧滑,产生激转、侧翻、反应迟钝、甩尾等危险工况。
目前的车辆稳定性控制系统,通常选取这两个参数作为控制对象。一个作为主要控制变量,一个作为辅助变量。例如BOSCH的ESP系统以横摆角速度为主要控制目标,TOYOTA的VSC以质心侧偏角做为主要控制目标。
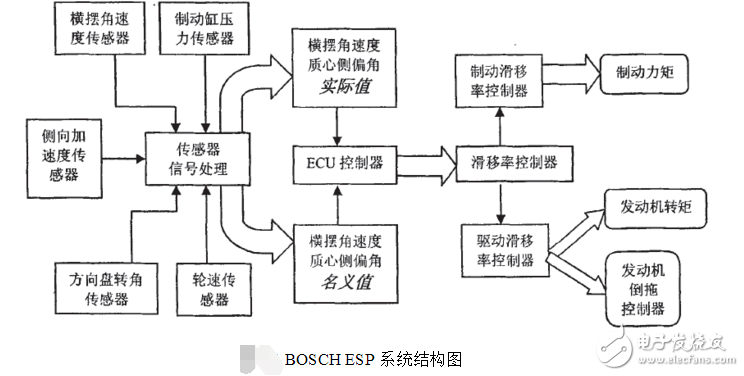
控制系统结构
各传感器估算各轮的滑移率、垂直载荷、摩擦系数、质心侧偏角和纵向速度等,通过信号处理计算出车辆的名义值,ECU控制器将差值进行分析,计算需要施加的横摆力矩增量,确定被控车轮,副回路通过防抱死(ABS)子系统和防驱动滑转(ASR)子系统以及防倒拖转矩控制(MSR)子系统来对指定车轮进行制动或者调整发动机输出转矩,达到控制制动力和驱动力来满足主回路的控制,实现车辆的稳定性。
#p#ESP系统的综合控制原理分析e#
ESP系统的综合控制原理分析
1.避免不足转向或过度转向
汽车转向稳定性可以采用不足转向、过度转向和中性转向来衡量,汽车在低速行驶时,无论受到侧向风力作用还是快速打方向盘,均不会出现不足转向或过度转向。但是,在高速行驶时,轻微的方向盘转动或者较小的外部侧向力作用均可导致汽车出现不足转向和过度转向,即此时的汽车转向轨迹已经不符合驾驶员意愿,而且一般驾驶员难以纠正这种危险倾向。汽车的重心也会随着车上乘员或者货物的变化而出现前移而导致不足转向,或者后移而导致过度转向。
在汽车转向的过程中,ESP 监测方向盘转角和横摆角速度,同时获得车速信号,计算出汽车转向过程中产生的浮角,如图3.2所示的角β( 汽车行驶方向偏移汽车纵轴角) ,如果是此浮角导致汽车出现过度转向,那么对汽车采取外侧车轮制动,使汽车绕垂直于地面的轴线顺时针转动,从而减小浮角,使汽车趋于中性转向。同样,当汽车出现不足转向时,则对汽车内侧车轮制动,使汽车绕垂直于地面的轴线逆时针转动,同样减小浮角,使汽车趋于中性转向。
2.防止汽车超越转弯极限
在弯道加速时的汽车行驶性能可用转圈行驶试验得到。通过实验对比未配备和配备ESP 系统的车辆得出结论: ESP 系统可以有效地防止汽车超越转弯极限。此试验的条件是: 在附着系数为1 的结实的硬道面上,车速缓慢增加至圆圈半径为100m 的物理极限车速并保持,实验结果如下:
( 1) 未配备ESP 系统的汽车
在转圈行驶的行驶试验中,车速约超过95 km/h 就达到它的物理极限车速,所需的转向变得很困难,同时浮角也迅速增加,但驾驶员还能将汽车保持在圆形车道内行驶。到约98km/h的车速时,未配备ESP 系统的汽车行驶变得不稳定,汽车尾部甩出,驾驶员必须反转向并驶出圆形车道。此述实验可以验证,汽车转向过程中会出现极限车速,并且此极限车速随附着系数和转弯半径的变化而变化。在上述实验中,汽车的极限车速为95 km/h。到98 km/h 时,汽车变得不稳定,并且在不减速的情况下,通过驾驶技术已经不能克服。
( 2) 配备ESP 系统的汽车在配备ESP 系统的汽车车速到约95 km/h 时,其行驶性能与未配备ESP 系统的汽车在车速95 km/h 时的行驶性能完全一样。驾驶员想进一步提高车速已无法实现,因为汽车已处于稳定的极限,ESP 系统利用发动机干预限制汽车的驱动转矩。
3.减小制动距离
根据德国某数据库的一项研究表明: 由于惊慌等原因,在接近一半的事故中驾驶者未能用足够的力量进行制动。但通过实验表明制动辅助系统允许普通驾驶者在以100 km/h 的行驶速度制动时,制动距离平均缩短7. 6 m,如果行驶速度为50km/h,制动距离将缩短0. 7 m。但如果装配了ESP 系统,那么同样能够达到制动辅助系统的效果。ESP 系统装配的制动踏板位置传感器能够计算制动踏板的位置和踩下制动踏板的加速度,加速度很大表明需要紧急制动,即开始踩下制动踏板时制动力就必须达到最大值。一旦传感器收到制动踏板被踩下的加速度很大的时候,ESP 便进入干涉阶段使四个车轮的制动力迅速达到最大值,并且依然能够通过ABS 保证车辆不抱死。但是,若没有ESP 作用,制动力的上升随着制动踏板的行程的增加而增加,在车轮临近抱死阶段,制动力达到最大值,在这种情况下将丧失宝贵的制动时间。
-
宝马DSC系统故障的原因是什么?怎么解决?2021-08-30 3510
-
基于Proteus的汽车尾灯控制系统该如何去设计?2021-06-15 2725
-
怎样去设计一种汽车驾驶模拟器控制系统?2021-05-17 1909
-
自动化技术推动汽车控制系统的可持续发展2018-03-26 4585
-
dsc车身动态控制系统简介2017-12-07 4450
-
汽车巡航控制系统的介绍2017-11-20 1701
-
汽车电子控制系统单元的设计2017-09-08 915
-
汽车电子控制系统构造与维护2017-08-28 998
-
基于ARM 的汽车电子控制系统单元设计2010-03-20 735
-
什么是汽车自适应巡航控制系统2010-03-17 3854
-
基于ARM的汽车电子控制系统单元设计2009-12-01 567
-
汽车自动限速和超载控制系统构想2009-11-25 9601
-
基于DSP的高低速CAN总线汽车控制系统设计2009-10-06 4086
全部0条评论

快来发表一下你的评论吧 !
