

用RFID来实现Wi-Fi系统定位的解决方案
RF/无线
描述
随着移动通信需求的日益增长,允许访问特定位置信息在普适计算及应用方面表现出广泛的重要性。在室外环境下,基于全球卫星导航系统(GNSS)的全球定位系统(GPS)或者北斗星定位系统已经可以满足一定的室外定位需求。然而,这些技术并不能很好的运用在室内定位系统中,必须采用一些替代技术。
为了实现这个目标,基于IEEE802.11无线局域网(Wi-Fi)的技术提供了一个高性价比的解决方案。实际应用中也已经提出了许多算法方案,包括测量接收信噪比(SNR),以及使用更广泛的接收信号强度指示(RSSI)。室内定位问题必须要考虑室内环境所表现出的传输信道特性,由于墙壁和障碍物的影响,会带来多径衰弱、吸收以及遮蔽等一系列问题。因此,基于几何角的测量技术,比如到达角(AOA)、到达相位(POA)、到达时间(TOA)或者到达时间差(TDOA)不能很好的应用在室内定位系统中。
近几年,随着射频识别技术(Radio FrequentlyIdentification,RFID)的不段完善和推广,并且凭借其重量轻、功耗低和识别能力强等独特优势,逐步运用在各种场合中,如身份标识、工程控制和定位追踪等领域。本文的研究重点是将研究Wi-Fi无线传输技术与RFID识别技术相结合,通过RFID标签来实现Wi-Fi系统定位的解决方案。据初步检索,国内对基于Wi-Fi的RFID定位技术研究工作尚不多见,本文的工作是将对基于Wi-Fi的RFID定位系统的定位方案进行探讨。
1 定位系统的硬件结构
射频识别技术(RFID)是20世纪90年代起新兴的一项自动识别技术,它主要通过标签对应的唯一ID号识别标志物。与传感器技术类似,RFID技术被认为是物联网(The Internetof Things)一项支撑技术。某些人认为,前者只是识别,没有处理的能力,而后者可以对感知到的物品进行处理。和传统的磁卡、IC卡相比,射频卡最大的优点就在于非接触,因此,识别工作无须人工干预,可工作于各种恶劣环境。RFID技术可识别高速运动物体并可同时识别多个标签,操作快捷方便。
RFID是一种简单的无线系统,只有两个基本器件,该系统用于控制、检测和跟踪物体。系统由一个阅读器和多个标签组成。
RFID技术利用无线射频方式在阅读器和标签之间进行非接触双向传输数据, 已达到目标识别和数据交换的目的。最基本的RFID系统由三部分组成:电子标签(Tag)、读写器(Reader)和在标签与读卡器间传递射频信号的微型天线(Antenna)。
我们下面将要研究的定位测试平台主要由多个支持RFID读写器功能的Wi-Fi接入点和内置有RFID标签的Wi-Fi终端组成,图1所示为定位系统的硬件框图设计。
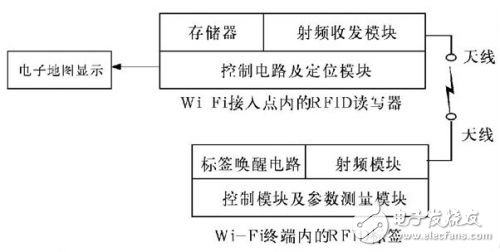
图1 系统硬件框图
2 定位方案
基于Wi-Fi的RFID定位方案我们将考虑采用以下两种解决方案:(1)基于信号强度和到达时间差复合定位方案;(2)基于位置距离和角度的定位方案。
2 . 1 基于信号强度和到达时间差复合定位方案
对室内Wi-Fi终端进行定位前,首先根据室内实际情况规划出室内的终端分布图,存入信息处理数据库;然后根据室内分布情况设置AP接入点,同时我们需要设置一个位置固定的参考标签, 作为测量基准点来帮助进行位置校准, 设置的接入点数量根据具体的室内情况而定。
当Wi-Fi终端进入室内后,AP接入点内的RFID读写器被唤醒,再由读写器发出一个无线唤醒信号,唤醒Wi-Fi终端内的RFID标签。标签接收到唤醒信号后,从休眠模式中唤醒,然后比较自身ID号与接收信号中的ID号是否一致,ID号不相符的标签再次进入休眠模式,而ID相符的标签则进入接收模式,接收信号并定位解算出其位置数据,并将位置数据送到处理器进行处理。文献[4]中已经研究了基于RFID的停车场无线定位方案,而我们提出了一种基于Wi-Fi的RFID定位方案,通过多个Wi-Fi AP接入点内的读写器分别读取待定位Wi-Fi终端内的RFID标签,将获得的位置数据进行融合, 最终得到RFID标签的位置信息。如图2给出了基于该定位算法的结构化框图。
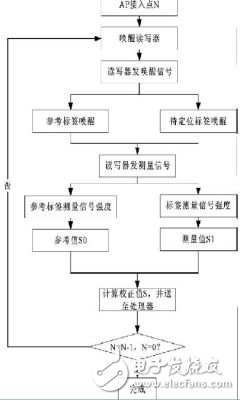
图2 基于信号强度的定位算法框图
基于信号强度的定位算法是用一个位置已知的参考标签与待定位Wi-Fi终端的标签接收同一个AP接入点的定位信号。参考标签所测得的位置与该点已知值进行比较后,获得读写器的定位数据的校正值,然后及时将此校正值发送给待定位的标签,修正标签所测得的实时位置信息S,并将此信息上传给读写器。在此过程中始终保持只有一个读写器工作,其余的读写器处于休眠状态,当一个读写器完成位置信息采集后,再由其他读写器完成同样的过程,这种定位方式下至少需要进行3次位置信息的采集。假设信号强度公式与读写器和标签之间的距离有关,则简单信号传播模型可用式(1)表示:
P(r )= (P )-10alog(r/0r)(1)式中, P(r)为标签接收到的信号功率; r为标签与读写器的距离; r0 为相对于读卡器的参考距离; P(r)0 为该参考点的信号功率, 参数a 为路径损耗随着距离r 的增加而增加的速率。需要指出的是,通过该模型计算出的某个位置信号强度往往被估计得过高,实用性不大,比较实用的信号强度模型在文献[6~7]中有比较详细的介绍。
采用到达时间差(TDOA)算法是通过测量不同读卡器接收到同一标签的定位信号的时间差,并由此计算出标签到不同读写器的距离差。标签到任何两个读写器的距离差D为定值,标签必定位于两个读写器为焦点的双曲线上,当同时有N个读写器参与测距时(N≥3),由多个双曲线之间的交汇区域就是对标签位置的估计。TDOA只是测量各读写器接收到的同一标签定位信号的到达时间差,参加定位的各个读写器在时间上不要求严格同步。假定测量第i 个读写器和第j个读写器的到达时间分别为 TAi 和TAj ,那么信号到达第i 个和第j 个读写器的时间差就是 TAji = TAi -TAj , 它们的距离差Rji = C*TAji .则标签坐标与读写器坐标存在如下关系:
解上述方程组, 利用基于信号强度定位算法算出的坐标值及一些先验知识(如室内半径)从其两个解中分辨出Wi-Fi终端的具体位置。
2 . 2 基于位置距离和角度的定位方案
文献[5]中,P.Munishwar等人提出了一种基于RFID的机器人定位方案,我们在此工作基础上提出了一种可以运用在Wi-Fi系统中的终端定位方案。该方案与基于信号强度的定位方案的不同在于引入了方向角的计算,通过距离和角度信息来实现Wi-Fi终端的定位。在Wi-Fi系统中需要设置了一个或多个传感器,用来跟踪待定位终端的运动,这些传感器可以通过串行接口进行查询,并返回自上次查询之后终端的运动距离和角度信息。
内置在Wi-Fi终端内的RFID标签允许待定位终端确定它的绝对位置(x,y),而位置的不确定性等于RFID读写器的最大标签感知半径。
系统定期运行算法一次(比如50ms),来获取和处理传感器和RFID读写器的数据。
通过RFID技术定期的重新校准终端位置和角度数据,每次定位算法运行时,它读取传感器两次查询之后的距离和角度差值变化, 并把变化值分别累加到已知的位置和角度上,并且复位传感器。传感器可以从标签两次测量的坐标(x1,y1)、(x2,y2)来判断它的运动方向, 即:
如果终端在一条直线上运动, 那么△θRFID等于0,最后根据终端的位置和角度信息, 我们就可以对终端进行定位。图3 给出了该定位算法的结构化图示。
![]()
图3 基于终端位置和角度的定位算法框图
3 结语
本文主要探讨了基于Wi-Fi的RFID定位系统的定位解决方案, 主要对基于信号强度的定位方案以及基于距离和方向角的定位方案,相关试验结果表明:这两种定位算法都可以达到精度为1 米左右的定位误差,可以满足室内定位的精度需求,并且鉴于RFID设备在软硬件成本上的优势,RFID定位解决方案具有广泛的实用潜力。
-
解读Nordic基于SSID的Wi-Fi定位解决方案2025-09-09 4303
-
基于 SSID 的 Wi-Fi 定位:与其他定位服务的性能比较2025-08-31 558
-
silex希来科的产品在最新的Wi-Fi技术和个人客户支持解决方案2025-08-27 921
-
Wi-Fi 定位服务2025-04-17 712
-
Qorvo分布式Wi-Fi网格解决方案2020-11-02 2841
-
Wi-Fi儿童故事机的解决方案2020-07-02 2481
-
求首款单芯片低功耗Wi-Fi解决方案?2020-06-14 1557
-
基于Wi-Fi的RFID定位系统探讨2019-05-29 2197
-
Wi-Fi网状网络解决方案扩展连接边界2018-08-30 3449
-
Wi-Fi定位技术原理及应用2017-11-02 24583
-
物联网与SimpleLink Wi-Fi的简易连接解决方案2016-02-24 3185
-
Wi-Fi智能插座解决方案分享2016-01-28 3194
-
SimpleLink™ Wi-Fi® CC3000 Boosterpack 参考设计2015-05-06 3588
全部0条评论

快来发表一下你的评论吧 !
