

矢量控制的基本原理介绍
控制/MCU
描述
矢量控制原理--简介
矢量控制,也称为磁场导向控制,是一种利用变频器控制三相交流马达的技术,利用调整变频器的输出频率、输出电压的大小及角度,来控制马达的输出。其特性是可以个别控制马达的的磁场及转矩,类似他激式直流马达的特性。矢量控制可以适用在交流感应马达及直流无刷马达,早期开发的目的为了高性能的马达应用,可以在整个频率范围内运转、马达零速时可以输出额定转矩、且可以快速的加减速。
由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。上世纪60年代末由达姆斯塔特工业大学(TU Darmstadt)的K.Hasse提出。在70年代初由西门子工程师F.Blaschke在不伦瑞克工业大学(TU Braunschweig)发表的博士论文中提出三相电机磁场定向控制方法,通过异步电机矢量控制理论来解决交流电机转矩控制问题。矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
矢量控制原理
矢量控制的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流) 和产生转矩的电流分量 (转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
矢量控制系统,坐标变换是核心思想。矢量控制的基本思想是以产生同样的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流等效成两相静止坐标系上的交流电流,在通过坐标旋转变换将其等效成同步旋转坐标系上的直流电流,等效过程中实现磁通和转矩的解耦控制,达到直流电机的控制效果,得到直流电动机的控制量。便可将三相异步电动机等效为直流电动机来控制,获得与直流调速系统接近的动、静态性能。
基于转差频率控制的矢量控制方式同样是在进行U / f =恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对通用变频器的输出频率f进行控制的。基于转差频率控制的矢量控制方式的最大特点是,可以消除动态过程中转矩电流的波动,从而提高了通用变频器的动态性能。早期的矢量控制通用变频器基本上都是采用的基于转差频率控制的矢量控制方式。
无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。实现精确的磁场定向矢量控制需要在异步电动机内安装磁通检测装置,要在异步电动机内安装磁通检测装置是很困难的,但人们发现,即使不在异步电动机中直接安装磁通检测装置,也可以在通用变频器内部得到与磁通相应的量,并由此得到了所谓的无速度传感器的矢量控制方式。它的基本控制思想是根据输入的电动机的铭牌参数,按照一定的关系式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压的频率使励磁电流(或者磁通)和转矩电流的指令值和检测值达到一致,并输出转矩,从而实现矢量控制。
采用矢量控制方式的通用变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。由于矢量控制方式所依据的是准确的被控异步电动机的参数,有的通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器,并需使用厂商指定的变频器专用电动机进行控制,否则难以达到理想的控制效果。
目前新型矢量控制通用变频器中已经具备异步电动机参数自动辨识、自适应功能,带有这种功能的通用变频器在驱动异步电动机进行正常运转之前可以自动地对异步电动机的参数进行辨识,并根据辨识结果调整控制算法中的有关参数,从而对普通的异步电动机进行有效的矢量控制。除了上述的无传感器矢量控制和转矩矢量控制等,可提高异步电动机转矩控制性能的技术外,目前的新技术还包括异步电动机控制常数的调节及与机械系统匹配的适应性控制等,以提高异步电动机应用性能的技术。为了防止异步电动机转速偏差以及在低速区域获得较理想的平滑转速,应用大规模集成电路并采用专用数字式自动电压调整(AVR)控制技术的控制方式,已实用化并取得良好的效果。
矢量控制系统的基本思路
矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图2-1所示,在三相坐标系上的定子交流电流,,ABCiii,通过3/2变换可以等效成两相静止正交坐标系上的交流si和si再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流smi和sti。m绕组相当于直流电动机的励磁绕组,smi相当于励磁电流,t绕组相当于电枢绕组,sti相当于与转矩成正比的电枢电流。其中矢量控制系统原理结构图如图2-2所示。
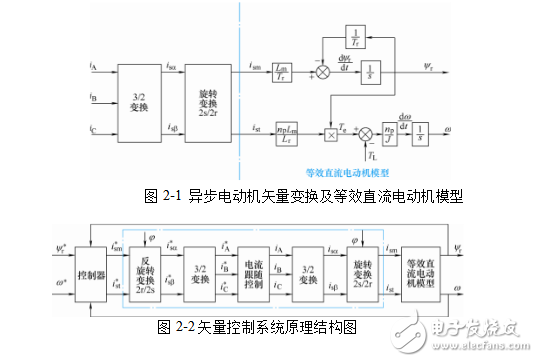
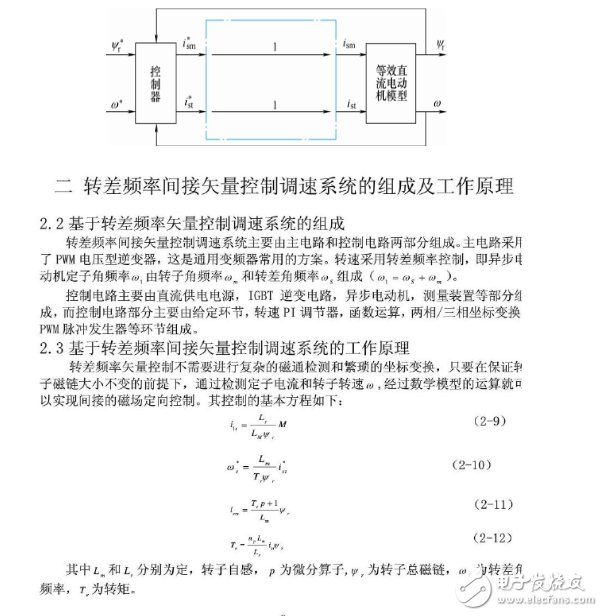
通过转子磁链定向,将定子电流分量分解为励磁分量smi和转矩分量sti,转子磁链r仅由定子电流分量smi产生,而电磁转矩eT正比与转子磁链和定子电流转矩分量的乘积,实现了定子电流的两个分量的解耦。简化后的等效直流调速系统如图2-3所示
- 相关推荐
- 矢量控制
-
什么是矢量控制?什么是FOC?YS YYDS 2023-04-18
-
三相PMSM矢量控制的基本原理是什么?2021-07-27 0
-
矢量控制实现的基本原理2021-09-09 0
-
三电平逆变器中点电压平衡的电压空间矢量控制原理及算法2009-07-14 2506
-
矢量控制(FOC)基本原理(1)2016-12-20 1345
-
矢量控制(FOC)基本原理2016-12-20 2343
-
通用变频器矢量控制的基本原理2017-01-21 1475
-
浅谈变频器矢量变换控制的基本原理及应用2017-01-21 1164
-
矢量控制坐标变换_矢量控制的基本方法_永磁电机矢量控制系统结构2017-11-23 19772
-
基于DSP和CPLD的异步电机矢量控制系统2021-05-17 1018
-
矢量控制的基本原理 矢量控制和直接转矩控制的区别2023-03-28 6784
-
异步电机矢量控制与标量控制2023-03-29 596
-
了解矢量网络分析的基本原理2023-11-02 282
-
空间电压矢量控制模式和v/f有区别吗2024-10-12 640
-
空间电压矢量控制模式是什么意思2024-10-12 658
全部0条评论

快来发表一下你的评论吧 !
