

光电与RFID 物流机器人总体结构设计
RF/无线
描述
1 光电与RFID 物流机器人总体结构设计
光电与RFID 导引物流机器人系统是三层架构的系统, 分为系统层、控制层和执行层。由系统控制软件系统、机器人本体控制系统、机器人传感器采集、机器人运动执行、机器人运行场地及RFID 标签、无线通讯链路等组成。系统结构层次图如图1 所示。
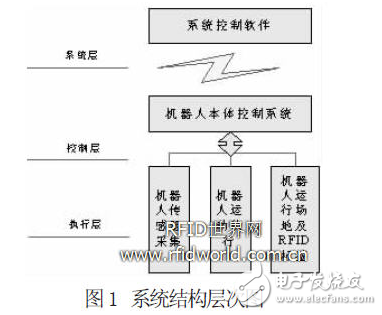
系统层是光电与RFID导引物流机器人控制系统的核心, 是整个系统的规划调度中心, 主要由系统控制软件和无线通讯链路组成。机器人需要执行的命令、需要完成的任务、路径优化、障碍物信息反馈处理等都由系统层完成。
控制层是光电与RFID 导引物流机器人控制系统中的一个中间环节, 是接收系统层相关命令或任务信息, 调配给各执行机构的枢纽; 是采集各个传感器元件信息, 通过无线通讯链路反馈给系统控制软件的枢纽; 是机器人自身系统功能自动检测, 运行中障碍物判定和信息反馈的枢纽; 主要由安装在机器人本体上的单片机控制器和无线通讯链路组成。
执行层是光电与RFID导引物流机器人控制系统的终端, 由机器人轨迹探测信息、外部按键控制信息、机器人姿态信息等信息采集终端;机器人前进后退, 姿态调整等驱动终端组成。本系统中主要的RFID 信息采集也在执行层。
实际应用中的光电与RFID导引物流机器人系统还应有相应的辅助系统(元件) 支持, 主要包括机器人运动场地、RFID 标签和RFID 标签信息写入器等。
2 光电与RFID 物流机器人硬件系统
光电与RFID导引物流机器人硬件系统主要由计算机、无线数据传输模块、机器人本体控制器、电机及驱动器、编码器、传感器、RFID阅读器等组成。光电与RFID 导引物流机器人硬件系统结构图如图2 所示。
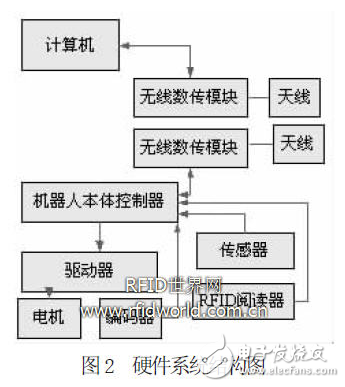
计算机是光电与RFID导引物流机器人系统层的硬件设备, 是系统控制软件安装的载体, 可以采用普通PC 机、服务器、工控机或者笔记本电脑, 在实际光电与RFID 导引物流机器人系统应用中, 应该采用标准服务器, 因为系统控制软件就有信息备份和执行记录功能, 相关信息都应记录在服务器的数据库中, 并做好系统安全和数据备份工作。
无线数据传输模块是光电与RFID导引物流机器人系统层与控制层间的数据链路, 是实现系统控制的重要环节。无线数据传输模块由发射器和接收器组成, 发射器与接收器是同频模块, 也可以一台发射器多台接收器, 其通讯控制采用主从式(点名式) 控制方式, 详细控制方式依据通讯协议进行信息交互。机器人本体控制器是光电与RFID 导引物流机器人控制层的核心, 主要采用AVR 单片机MEGA128 芯片作为控制核心, 辅助有DI、DO 接口电路, 与无线数据传输模块通过RS232 接口通讯, 与执行元件间通过UART、DI 等接口通讯。
光电与RFID导引物流机器人的电机采用大扭矩直流减速电机, 驱动器采用H桥PWM调速方式驱动, 可以实现对电机运行速度控制。编码器是配合直流减速电机使用的运动反馈元件, 主要实现电机运行距离信息的反馈, 用来动态平衡调节两台直流减速电机自身的速度差异, 作为机器人姿态调整的辅助元件之一。
传感器是光电与RFID导引物流机器人中的主要信息采集器件, 包括有光电色差传感器、红外避障探测传感器、平面电子罗盘等。RFID阅读器是光电与RFID导引物流机器人中的重要信息采集元件, 安装在机器人本体上, 用于采集机器人运动轨迹中的RFID标签信息。
3 光电与RFID 物流机器人软件系统设计
光电与RFID导引物流机器人软件系统包括系统控制软件和机器人本体控制器控制软件两部分。
系统控制软件是光电与RFID导引物流机器人软件系统的核心, 采用C# 开发, 具有遥控运行、命令控制和任务控制的功能, 可以实现运行路径的实时监控和信息存储。系统控制中的路径优化算法和控制命令等都是由系统控制软件发出。
机器人本体控制软件是针对单片机运行的底层控制软件, 主要是将系统控制软件的信息翻译成为各个执行元件的控制命令信息, 将采集到的相关信息翻译并传送回系统控制软件。机器人本体控制软件应用GCC 开发软件开发。
4 光电与RFID 物流机器人辅助系统设计
光电与RFID 导引物流机器人辅助系统由机器人运动场地和RFID标签组成。机器人运动场地是RFID 智恩那个物流导引机器人系统的应用场所, 而给予RFID 和光电磁导引的机器人场地, 以白色(浅色) 为底色, 在需要运动的路径铺设黑色(深色) 的轨迹线, 为机器人运动提供基准路径。RFID 标签是指定的路径的关键点位的标志, 在标签内写入场地的点位坐标, 作为导引路径的点坐标。
-
变结构智能服务机器人2013-10-31 3341
-
【mBot申请】物流搬运机器人2015-11-30 5393
-
智久机器人:AGV是高效物流的推动力2015-12-12 3992
-
【LeMaker Guitar申请】物流机器人人机交互2016-01-18 2963
-
什么是鸥鹏机器人制作的小型物流系统?2016-04-05 3767
-
物流机器人“驾到” 这个行业是要变天了!2017-04-14 3932
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8379
-
工业机器人的技术原理2018-11-23 5123
-
四足机器人的机构设计2021-09-15 2161
-
轴系结构设计实验2009-03-13 59503
-
关节型机器人的结构设计2016-05-30 1049
-
基于拟人机器人结构设计2017-10-17 1041
-
物流机器人的类型_物流机器人的组成2020-04-03 7901
-
物流机器人有哪些_物流机器人结构2020-12-21 8197
-
机器人末端抓手的工作原理及结构设计2023-11-04 3057
全部0条评论

快来发表一下你的评论吧 !
