

基于dSPACE实时仿真的无刷直流电机控制系统
伺服与控制
描述
dSPACE实时仿真系统是一套基于MATLAB/Simulink的控制系统开发及半实物仿真的软硬件工作平台,实现了和MATLAB/Simulink/RTW的完全无缝连接。dSPACE实时系统拥有实时性强,可靠性高,扩充性好等优点。dSPACE硬件系统中的处理器具有高速的计算能力,并配备了丰富的I/O支持,用户可以根据需要进行组合;软件环境的功能强大且使用方便,包括实现代码自动生成/下载和试验/调试的整套工具。dSPACE软硬件目前已经成为进行快速控制原型验证和半实物仿真的首选实时平台。
dSPACE实时仿真系统是一套基于MATLAB/Simulink的控制系统开发及半实物仿真的软硬件工作平台,实现了和MATLAB/Simulink/RTW的完全无缝连接。dSPACE实时系统拥有实时性强,可靠性高,扩充性好等优点。dSPACE硬件系统中的处理器具有高速的计算能力,并配备了丰富的I/O支持,用户可以根据需要进行组合;软件环境的功能强大且使用方便,包括实现代码自动生成/下载和试验/调试的整套工具。dSPACE软硬件目前已经成为进行快速控制原型验证和半实物仿真的首选实时平台。
dSPACE体系结构
dSPACE实时仿真系统是由德国dSPACE公司开发的一套基于MATLAB/Simulink的控制系统开发及测试用的工作平台,实现了和MATLAB/Simulink的完全无缝连接。dSPACE实时系统拥有高速计算能力的硬件系统(包括处理器、I/O等),还拥有方便易用且能实现代码生成、下载、试验和调试的软件环境。
dSPACE的硬件系统
针对不同的用户,dSPACE可分为标准组件系统和单板系统。标准组件系统是把处理器板、I/O板分开,并提供多个系列和品种,允许用户根据特定需求随意组装,可以使用多块处理器板、多块(多种)I/O板,使系统运算速度、内存和I/O能力均可大大扩展,从而满足复杂的应用之需。单板系统本身就是一个完整的实时仿真系统,DSP和I/O全部集成于同一板上,其I/O包括了采用快速控制原型设计的大多数I/O(如A/D、D/A等),为配合驱动应用需求,配有PWM信号发生器等。
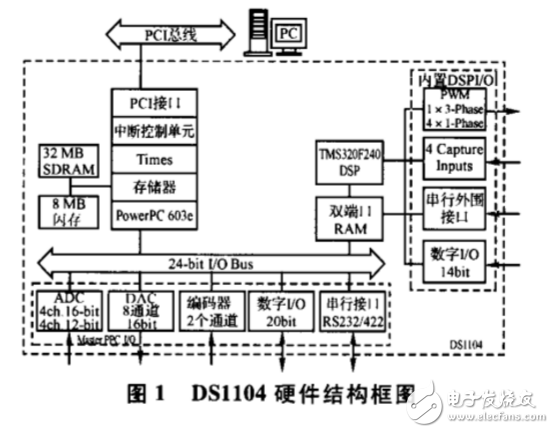
单板系统DS1104的硬件结构图,如图1所示。dSPACE系统的硬件主要包括基于PowerPC和DSP的处理器芯片,用于实现对用户设计的算法或仿真模型的实时运行。PowerPC的时钟频率为250MHz,并提供16kB的片内数据缓存和片内指令缓存。存储器包括8MB的闪存和32MB的SDRAM主存储器。为了满足硬件在回路仿真时的需要,DS1104提供了8通道A/D转换,8通道D/A转换,20位数字I/O口以及同步串行接口。DS1104单板系统内置了TEXAS公司的TMS320F240DSP芯片,它通过双端口存储器(DualPortRAM)与PPC相连。这个内置的DSP能够产生PWM信号,并且具有14位的数字I/O口。
dSPACE的软件系统
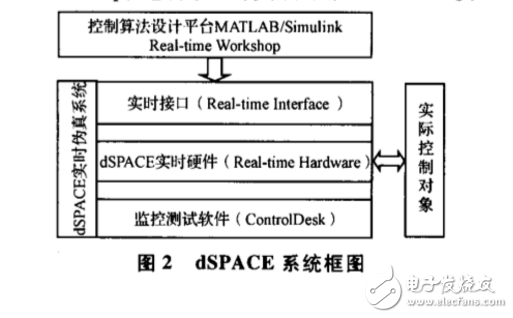
dSPACE实时仿真系统允许用户实时地调整控制器参数和运行环境,并提供各种各样的参数显示方式。dSPACE的实时仿真系统主要由3部分组成,如图2所示,分别为控制系统算法设计平台MATLAB/Smiulink、dSPACE实时仿真系统及外部真实环境和设备。其中,RTI(RealTmieInterface)是连接dSPACE实时系统与MATLAB/Smiulink的纽带,用户通过将RTI库中的模型与MATLAB/Smiulink配合使用,设计控制器的Smiulink模型,通过对RTW(RealTmieWorkshop)进行扩展,实现了从Smiulink模型到SPACE实时硬件代码的无缝自动下载。dSPACE实时硬件负责与外部设备连接,交互控制信息与反馈信息,监控测试软件,提供对试验过程的综合管理,在线调整参数,建立用户虚拟仪表,实时观测控制效果。
针对dSPACE实时仿真系统的3个部分,dSPACE软件系统相应地也由3个模块组成:算法开发模块,实时运行模块及实时测试和监控模块。算法开发包括在Simulink里设计在线模型或用C语言编写模型代码; 实时运行模块依据算法开发的不同形式,相应地也有2种方式:基于Simulink的模型在RTW和RTI的支持下自动完成模型的代码生成、编译、链接、下载;手工编写的模型则需要通过运行dSPACE提供的批处理命令完成上述功能;!实时测试和监控模块由dSPACE系统提供的用户界面软件ControlDesk来完成,利用ControlDesk实现对实时硬件的图形化管理,包括新硬件的注册管理、控制实时程序的启动和停止及差错监视、虚拟仪表的建立以及与实时程序进行动态数据交换、访问RTI生成的变量文件、在变量和虚拟仪表之间建立联系、访问与实时操作相关的变量等参数的可视化管理。
dSPACE在BLDCM控制系统中的应用
无刷直流电机控制的一个关键问题是要解决电子换向控制器的设计和实现。本研究以无刷直流电机控制为例来研究dSPACE在线仿真设计问题。其控制系统原理图,如图3所示,它是由PID控制器、脉宽调制器(PWM)、功率放大器、无刷直流电机及光电码盘组成的一个速度反馈控制回路。
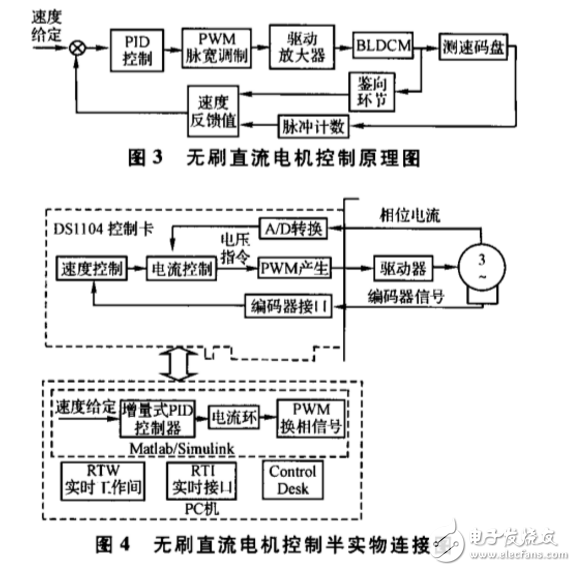
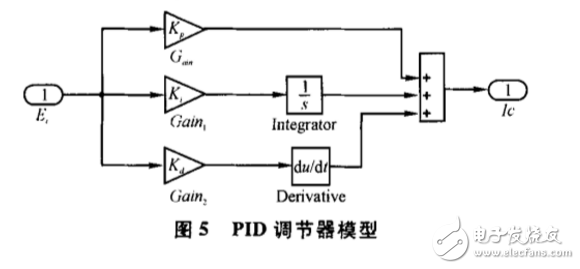
无刷直流电机半实物连接图,如图4所示,图中下部方框是PC机部分,用于在线模型的设计、实时代码的生成、下载以及实验仿真。上部即物理设备,包括无刷直流电机、电机驱动器以及dSPACE控制卡。无刷直流电机控制系统根据实际需要采用数字PID调节器,如图5所示。
控制系统中的PWM脉宽调制部分、脉冲计数部分及相应的输入/输出由dSPACE系统的RTI模块库中的相应模块替代,使整个控制系统完全在Simulink下建模,如图6所示。
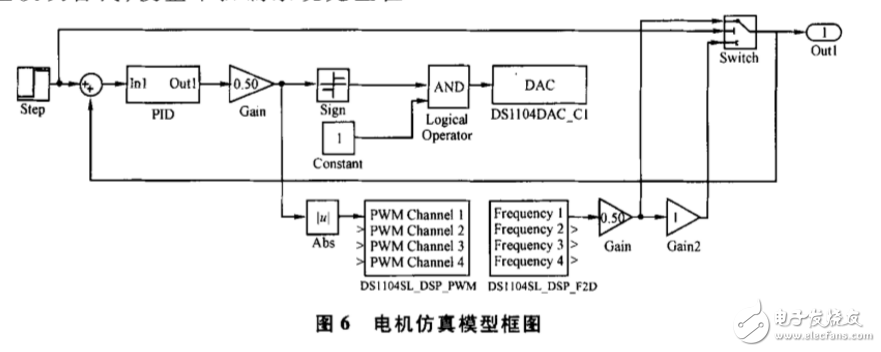
图中,DS1104SL,DSP,PWM、DS1104SL,DSP,F2D、DS1104DAC,C13个模块都是由RTI模块库提供的,它们的功能分别是提供PWM脉宽调制信号、脉冲计数和D/A转换。
在MATLAB/Simulink中建立控制系统半实物仿真模型之后,对其进行代码生成、编译及下载。同时将dSPACE的硬件系统与外部受控对象(无刷直流电机)对应的控制端口相连(如DS1104SL,DSP,F2D与测速码盘输出相连,DS1104SL,DSP,PWM模块与驱动放大器相连以直接控制转速),构成半实物仿真系统的控制回路。为了实时调试控制效果,通过dSAPCE的测试软件建立虚拟仪表,如图7所示。
Simulink为复杂系统建模仿真提供了直观方便的计算机环境,它可以通过一系列模块的连接,构成复杂的系统模型。dSPACE仿真平台与MATLAB实现了无缝连接,使广大MATLAB用户可以轻松地掌握dSPACE的使用,从而方便地从非实时分析、设计过渡到实时分析、设计,并通过对不同算法和参数的验证,设计出更好的控制器,应用于系统控制。
利用dSPACE提供的半实物仿真开发平台,可方便快捷地构建控制系统的模型,完成控制系统的设计和调试。同时,模型参数的修改、代码的生成及下载也非常方便,完全避免了过去因为局部改动就要多花费几周甚至几个月的时间进行代码修改和重新测试的不便,提高了工作效率。
控制系统实时仿真过程中用到的工具
在实时仿真中,我们使用dSPACE平台。它是一个由软硬件综合系统,它的软件可以和MATLAB无缝集成,使用起来非常方便。dSPACE软件系统由代码生成及下载软件和实验软件两大部分组成,首先介绍代码生成及下载软件RTI和PPC编译器。
RTI是连接dSPACE实时系统与软件开发工具MATLAB/Simulink之纽带。RTI对Simulink库进行了扩展,利用这些框图可以无需写任何代码就能完成包括I/O接口及初始化过程的全部设置。同时通过对RTW进行扩展,可实现从Simulink模型到dSPACE实时硬件代码的无缝自动下载。这可使用户完全致力于实际设计过程并能迅速完成设计的更改,费力的手工编程已成为过去。
除标准I/O功能外,RTI还支持用户在SIMULINK框图中完成:
指定部分模型为定时执行
指定部分模型为软件中断
指定部分模型为硬件中断
指定中断及定时任务的优先级
支持单采样频率和多采样频率
支持单任务模式和多任务模式
另外,RTI还充分考虑了实际工程应用中可能遇到的各种问题,如:
通过附加手段解决采样频率不同的模块之间数据传送的不一致性
支持多处理器,允许在SIMULINK中完成多处理器模型的分割
允许指定处理器之间的数据通讯协议,可采用:同步BUFFER,异步BUFFER,及共享存储区方式
允许处理器之间进行中断
RTI可以处理连续系统、离散系统、混合系统和多采样频率系统。
当系统比较复杂,单处理器系统难以完成时,需要多个处理器并行工作。这时,就需要RTI-MP的帮助以完成多处理器系统的系统设计、建立多处理器网络结构(包括处理器之间的通讯)。RTI-MP允许用拖放方式对系统模型进行分割,每一个子系统均可进行单独调整。
不论用何种方式(手动或自动)生成实时系统,都需要一个C编译器。根据配置的不同,dSPACE系统使用POWER P C编译器Complier For PPC:适用于所有基于POWER PC处理器的系统。
当模型下载至dSPACE中后,就需要用实验软件对系统进行仿真测试了,此过程中用到的实验软件主要有:
综合实验环境ControlDesk
ControlDesk是dSPACE开发的新一代实验工具软件。虽然控制器的开发及仿真模型的建立还是使用MATLAB/SIMULINK,但是,一旦模型已经通过RTI实现并下载到实时硬件中,余下的就是ControlDesk的事了。ControlDesk将提供对实验过程的综合管理。利用ControlDesk可以实现:
实验过程自动化
用户虚拟仪表的建立
变量的可视化管理
参数的可视化管理
实验过程自动化
实现自动试验及参数调整的MLIB和MTRACE
利用MLIB和MTRACE,可以大大增强dSPACE实时系统的自动实验能力。使用这两个库可在不中断试验的情况下从MATLAB通过M编程直接访问dSPACE板上运行的应用程序中的变量。甚至无需知道变量的地址,有变量名就足够了。这样就可以利用MATLAB的数字计算及图形能力进行顺序自动测试、数据记录和控制参数的优化。
MLIB和MTRACE联合使用可组成一个完美的整体。有MATLAB强大的计算能力做支持,可以自动执行所能想到的任何试验。比如控制器的优化:用MTRACE记录数据,然后将数据传送给MATLAB。MATLAB自动计算出新的控制器参数,并通过MLIB送回处理器板或控制板。
MLIB和MTRACE也可以和ControlDesk同时使用。
实时动画软件MotionDesk
通常情况下,实时仿真过程的可视化是通过记录时间响应或仪表显示来实现的。不过,这些方法多少有些抽象。利用MotionDesk,仿真与真实世界之间的界限消失了。MotionDesk可为dSPACE处理器板上在线仿真的物体提供三维动画效果。仿真的任何改变所引起的结果都可以立即在屏幕上显示出来。
与实时处理器通讯的CLIB---PC
每一个实时仿真试验都需要在主机和控制器/处理器之间进行交互操作,如:改变参数、记录数据、在线显示等。dSPACE的ControlDesk及其它工具为大部分的控制任务提供了全面的解决方案。
但是,在某些情况下,可能会需要在没有dSPACE工具的情况下进行控制,如第三方测试、使用其它的可视化工具或使用用户编写的主程序等。
CLIB可在其他工具和实时硬件之间建立联系。CLIB包括一整套的C函数,可用来建立用户主界面,完成各种处理器控制功能,访问处理器存储器。它可从变量的符号名自动寻找其地址。CLIB允许多个程序(包括dSPACE工具和dSPACE以外的工具)同时访问处理器。
除了软件,Dspace还为用户提供了丰富的硬件资源,分为单板系统和组件系统,对于控制系统仿真来说,需要选择组件系统来完成如此复杂的功能。
dSPACE根据控制系统的各种接口需要可以提供组件系统来满足系统的需求。组件系统的核心是处理器板DS1005,它有强大的运算能力和I/O管理能力,运算能力可达12.6 SPECfp95,21.8 SPCEint95。使用了Motorola公司的PowerPC750(933MHz)作为处理器,共2KWords的片内数据缓存及32KWords的片内指令缓存。处理器板上还有16MByte闪存和128M SRAM主存储器。该板通过快速32位总线(PHS总线)提供到各种I/O板的接口,通过不同形式总线(ISA、PCI、PCMCIA、Ethernet)到主机的硬件接口。
另外,dSPACE还提供多种IO板卡方便用户的使用,用户应根据自己的需求进行选择,具体的型号和功能参见dSPACE产品手册。
推荐课程:
张飞软硬开源,基于STM32 BLDC直流无刷电机驱动器视频套件
http://t.elecfans.com/topic/42.html?elecfans_trackid=fsy_post
-
无刷直流电机无位置传感器控制系统仿真研究2025-07-08 574
-
无刷直流电机双闭环串级控制系统仿真研究2025-07-07 564
-
无刷直流电机控制系统是什么2023-03-06 3038
-
DSP在无刷直流电机控制系统仿真中的应用(精)2021-09-15 1090
-
DSP在无刷直流电机控制系统仿真中的应用(精)讲解2021-08-31 1171
-
两相无刷直流电机矢量控制系统2018-03-10 4710
-
DSP在无刷直流电机控制系统仿真中的应用2017-10-20 1494
-
基于DSP的无刷直流电机控制系统设计和仿真研究2016-05-05 710
-
无刷直流电机自适应模糊控制系统建模与仿真2016-04-06 786
-
基于DSP的无刷直流电机模糊控制系统2016-04-05 1042
-
基于Matlab/Simulink的无刷直流电机控制仿真研究2015-12-29 2401
-
基于Proteus和AVR单片机的无刷直流电机控制系统仿真2015-12-28 1067
-
基于STM32的无位置传感器无刷直流电机控制系统2015-11-09 1251
-
电动客车用无刷直流电机控制系统仿真分析2012-11-23 1693
全部0条评论

快来发表一下你的评论吧 !
