

基于STC12C5A60S2的电流型PWM功率放大器设计
功率放大器电路图
描述
摘 要:以 STC12C5A60S2高性能单片机作为控制核心,设计一种单自由度电流型 PWM 功率放大器,具有集成度高、体积小和成本优势。霍尔电流传感器完成电流信号到电压信号转换,单片机内部 2路 10位精度 A/D 分别采样控制信号和测量信号。离散 PI 控制器对 8 位精度 PWM 模块进行占空比调节,控制电流上升和下降速度。采用 Simulink 对比仿真了三电平控制策略,测试结果和仿真数据相一致,反映出功率放大器的静态电流精度高、纹波小,动态响应速度可以满足实际应用。从而得出控制策略有效,实现方法可行,系统稳定性好。
0、引言
在感性负载中,电流型 PWM 功率放大器的应用十分广泛。功率放大器的发展大致分为三代:第一代是线性功放,其优点是易于实现,缺点是系统动态性能差,效率较低,功率较大时器件发热严重,多用于功率不大、精度要求不高的场合。随着电力电子技术的进展,开关型器件逐渐应用在了功率放大器之上,这就是第二代功放。开关型器件的使用,不仅提高了电源效率,响应速度也更快,但开关型器件会产生很大的电磁干扰,同时电流纹波也比线性功放大。第二代功放多由数个独立模块组合构成,不仅体积巨大,而且开发周期长,系统整体可靠性不高。伴随着集成电路的出现和发展,A/D、PWM 等各种功能逐渐被整合进同一块控制芯片内,集成开关功放开始形成。集成电路因为电路的高度集成,抗干扰能力显著增强,整体稳定性大大提高,硬件设计得以简化,从此功率放大器朝着小型化、集成化的方向不断发展。目前,大功率功放均是采用开关型器件和高性能的微处理器。
本文设计的电流型 PWM 功率放大器可运用于需要对电流快速、稳定、精确控制的应用场合,从而实现轻量化、模块化应用。因此设计采用 STC12C5A60S2 高性能单片机,使用其内部 A/D 和 PWM 模块,最大限度减少了外围器件和电路,有效降低了成本并提高系统整体可靠性。因其是数字式 PI 控制器,简单修改控制参数即可灵活运用于多种负载。
本文针对电流型 PWM 功率放大器的控制策略进行电流纹波仿真分析,比较了两电平控制策略和三电平控制策略的电流纹波效果,以及三电平控制策略下不同续流时间所对应的电流纹波大小。测试验证了仿真分析结果,表明基于高性能单片机的数字式电流型 PWM 功率放大器方案可行,性能良好。
1、原理与设计
1.1 功率放大器拓扑结构
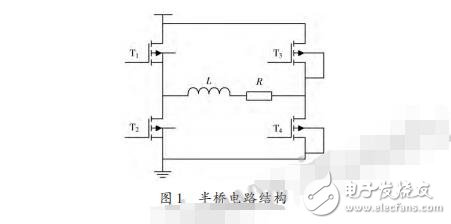
电流型 PWM 功率放大器的拓扑结构选用半桥电路结构,半桥电路结构如图 1 所示,由电磁线圈、功率场效应管和功率续流二极管构成。半桥结构的优点主要有:
(1)采用隔离电源驱动功率场效应管时,半桥结构可比全桥结构少用两路隔离电源;
(2)全桥结构中,当 T1,T2同时开通或者 T3,T4同时开通时,即同一桥臂的上下两管直通,电路会出现很大的短路电流,半桥结构中,无论 T1,T2出于何种状态均不会出现上下直通的情况。
1.2 功率器件和驱动
在电力电子中,用于功率变换的开关型器件有很多,有晶闸管、功率场效应管、IGBT 等,按照其驱动方式的不同可以分为电流型器件和电压型器件。目前功率放大器中使用的开关器件以功率场效应管和 IGBT 居多,这是因为功率场效应管和 IGBT 是单极性器件,内部只存在多数载流子导电,没有两种载流子(多子和少子)的复合问题,因而开关频率高,此外功率场效应管和IGBT价格便宜,种类多样,易于购买。
本设计选用的功率场效应管为国际整流器(IR)生产的 IRFP460,其具体技术参数有:最大漏源电压为500 V,最大电流漏极电流为 20 A。续流二极管只需要满足电路所要承受的最高耐压和最大电流要求,并留有一定的裕量即可,参考 IRFP460 的技术参数,本设计选用了 MUR860。
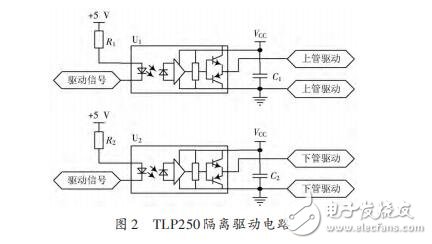
单片机的I/O 口并不能直接驱动功率场效应管工作,因此必须要设计一级驱动级,这里选择 TLP250作为隔离驱动器件。TLP250 是一种推挽式隔离驱动光耦,驱动电流 1.5 A,隔离电压630 V。TLP250 在使用时电源和地之间需要一个退耦电容,退耦电容的布置需尽可能靠近输入引脚,保证 TLP250 内部的高增益可靠工作。图 2是 TLP250隔离驱动电路。
1.3 功率放大器输出电流纹波
线性功率放大电路中,三极管工作在放大区,电感中的电流是稳定、平滑的,电流纹波较小。但是,在开关型功率发大器中,因为开关管的高速开关动作,电流纹波的影响不可忽视,有些系统中电流纹波甚至可达直流偏置电流的 15%以上。
1.3.1 两电平控制策略的电流纹波估算
两电平控制策略电流波形如图3所示,一个电流周期T内,电流只有上升、下降两个状态。
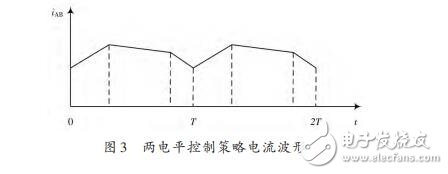
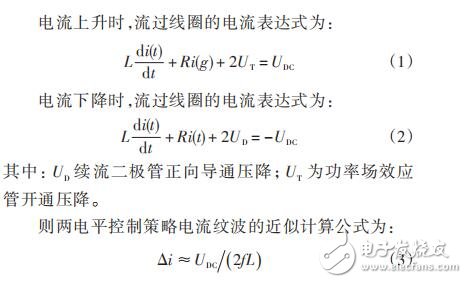
两电平控制策略中,电流纹波和直流电源电压成正比,和开关频率、线圈电感量成反比,即直流电压越高纹波越大,开关频率、线圈电感量越大纹波越小。
1.3.2 三电平控制策略的电流纹波估算
在两电平控制策略的基础上,三电平控制策略增加了一个电流续流状态。三电平控制策略电流波形如图4所示。
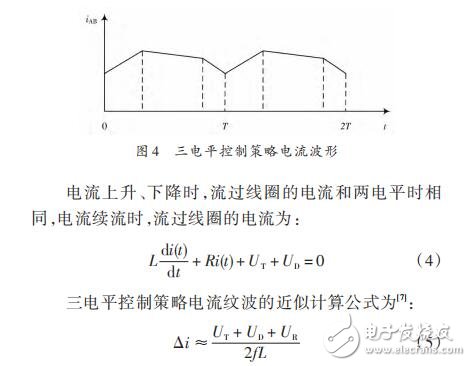
其中:UR为线圈中等效电阻的平均压降。一般直流电源的电压UDC远远大于UT和UD,尤其为了提高功率放大器的动态响应,UDC会很高。
比较两电平控制策略和三电平控制策略电流纹波的近似纹波可看出,在同一系统中,开关频率和线圈电感量相同,当功率放大器输出平均值相同时,应用三电平控制策略将减小电流纹波。
1.3.3 三电平控制策略的电流纹波分析
根据上面推导的两电平控制策略和三电平控制策略的电流纹波近似计算,可以得出三电平控制策略电流纹波比两电平控制策略要小的结论。
图5为利用 Simulink仿真得到的两电平控制策略和三电平控制策略电流波形对比图。
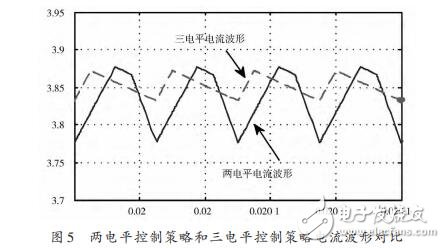
通过图5可以得出,应用三电平控制策略的电流型功率放大器电流纹波将比两电平控制策略减小 30%以上。
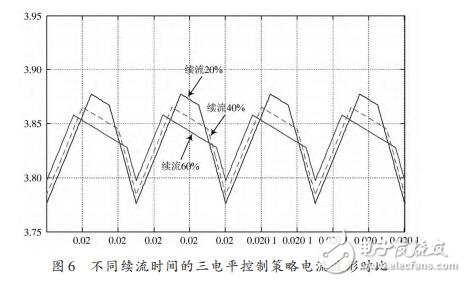
进一步仿真中,继续使用同一个三电平控制策略的电流型功率放大器,并设定功率放大器为相同电流值,但是续流时间不同的,分别为 20%,40%,60%,得到如图 6所示电流波形。
从图 6 可以明显看出续流时间越长电流纹波越小,从而提高三电平控制策的续流时间也是减小电流纹波的一种手段,实际上当系统电流稳定是三电平控制策的续流时间应达到 80%以上。
1.3.4 三电平控制策略的电流响应速度
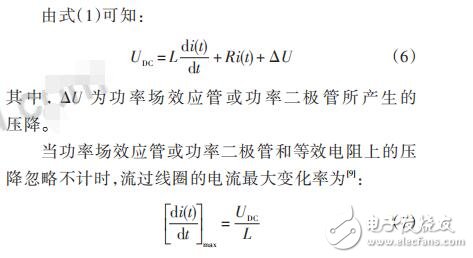
由式(7)可知,电流变化率主要取决于线圈电感 L和直流电源电压 UDC。在绝大多数系统中,线圈作为负载一般是固定不变的,从而增大直流电源电压,可以提高负载响应速度,缩短阶跃响应时间。
1.4 功率放大器软件设计
软件部分作为功率放大器的核心内容,是控制策略由构想到实现的重要保证。软件设计应该充分发挥控制芯片的性能优势,以使系统获得更短的响应时间和更高的执行效率。
为实现功率放大器的三电平控制策略,单片机需要输入/输出接口和实现三电平控制策略的控制器。输入/输出接口使用 A/D 采样输入控制、测量信号和 PWM 模块输出执行信号,控制器负责离散 PI运算[10]。
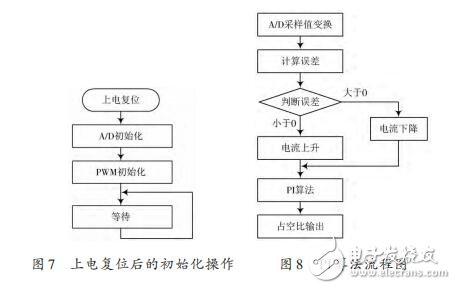
控制器在上电复位之后应该进行一系列的初始化操作,完成内部寄存器的初始化赋值,PI 控制器的参数设定,AD、PWM 模块相应寄存器设置,从而单片机让软硬件都可靠工作。图 7 所示为单片机上电复位之后的初始化操作。PI 算法流程图如图 8 所示,A/D 采样得到的 10 位二进制数代表的是 0~5 V 的电压值,电压值和实际电流值有一个对应关系。在进行误差计算前应该首先把电压值转为电流值,并变换为同一量纲,只有电流的设置值和实际值处于同一量纲之下,计算出的电流误差才是有意义的。判断电流误差大小,当误差大于 0 时控制电流减小,当误差小于 0 时控制电流增加。通过对误差的 PI算法,进行占空比调制,以控制电流上升和下降的速度。
2、实 验
2.1 直流稳压电源
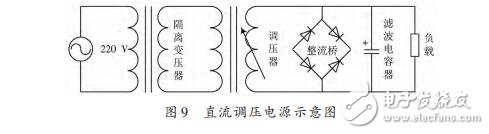
功率放大器使用的电源为直流电源,而市电为220V50Hz的交流电,市电经过隔离、调压、整流、滤波之后就转变为具有脉动的直流电。
图9所示为功率放大器的直流调压电源示意图,市电经过隔离变压器 BK⁃500 VA 的隔离,接在 500 VA 的调压器上,经过 KBPC3510 整流桥堆全波整流,随后并联一个 470 μF 的铝电解电容和一个 CBB104,输出端接在功放的电源输入端。
2.2 静态激励测试
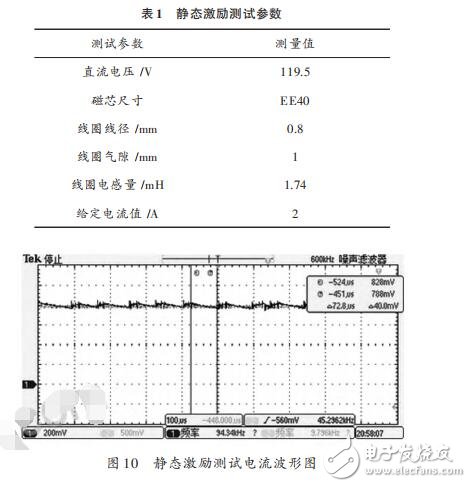
静态激励测试的目的是检验功率场效应管的开关是否正常,三电平控制策略是否有效,以及输出电流纹波的大小。静态激励测试的测试参数如表 1所示。
图 10 所示为功率放大器静态激励测试的电流波形图。从图 10 可以看出,电流波形规则而且平稳,没有剧烈振荡和不稳定情况出现,电流纹波 40 mV(对应实际纹波电流 100 mA)。与仿真结果(两电平控制策略电流纹波约 130 mA,三电平控制策略电流纹波约 80 mA)相比较,电流纹波小于两电平控制策略电流纹波但大于三电平控制策略电流纹波;由于实际控制、测量、显示部分均存在误差不可能达到仿真时的理想情况,可以认为功率放大器的电流纹波达到了预期要求。
2.3 动态激励测试
动态激励测试的目的是考查功率放大器的动态性能。测试时输入功率放大器的是一个频率变化的正弦波信号,得到功率放大器的频率特性和传输特性。图 11 是功率放大器的幅频特性曲线,从图中见当功率放大器幅值衰减到3dB时的截止频率为3 kHz左右。
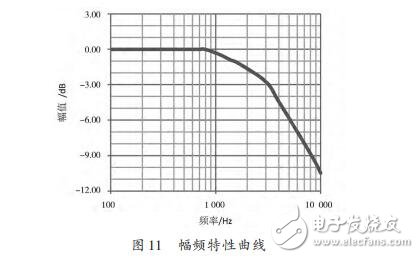
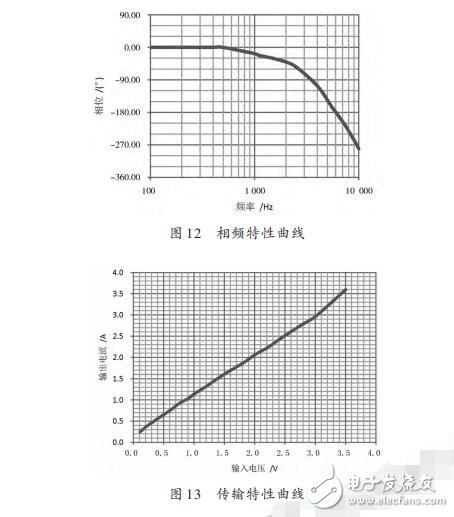
图 12 是功率放大器的相频特性曲线,从图中可见,当功率放大器相位滞后达到-180时的截止频率为6kHz左右,3 kHz 频率时功率放大器的相位滞后仅有-75°左右。
图 13 是功率放大器的传输特性曲线,从图中可见,系统的输入/输出之间保持了很好的线性度,因而功率放大器环节近似地可以看作一个线性环节。
3、结论
应用高性能51单片机 STC12C5A60S2 实现了单自由度的电流型 PWM 功率放大器,使用单片机内部 A/D和 PWM 模块,整体电路简单,外围器件少,有利于功率放大器的小型化且低成本。测试结果表明应用了三电平控制策略的电流型 PWM 功率放大器输出纹波电流小,动态性能好。
- 相关推荐
- 热点推荐
- PWM
- STC
- STC12C5A60S2
- 电流型功率放大器
-
功率放大器类型有哪些?功率放大器如何选择厂家2017-10-17 4451
-
STC12C5A60S2/STC12C5201AD系列单片机2010-09-23 1030
-
stc12c5a60s2管脚引脚图2012-11-11 25803
-
STC12C5A60S2中文手册完全版2013-09-06 9816
-
STC12C5A60S2的说明书_PDF2015-11-06 1781
-
STC12C5A60S2数据手册_官方2015-12-07 2692
-
STC12C5A60S2资料2016-04-11 2448
-
STC12C5A60S2单片机ID读取2016-05-10 883
-
STC12C5A60S22016-05-13 1276
-
STC12C5A60S2中文资料2017-02-07 2992
-
STC12C5A60S2技术资料2017-09-20 1394
-
stc12c5a60s2中文资料_引脚定义图及最小系统2017-10-20 163593
-
基于STC12C5A60S2的LCD显示屏源代码下载2021-04-29 1742
-
STC12C5A60S2最小系统2021-11-17 1679
-
STC12C5A60S2上两路PWM的使用方法2021-11-22 1662
全部0条评论

快来发表一下你的评论吧 !
