

基于PIC单片机的正弦波逆变器设计与实现
控制/MCU
描述
目前,SPWM信号主要有3种生成方式:
1)使用比较器、振荡器等模拟电路产生三角波和方波进行比较,产生SPWM波,但是此种方法电路复杂,受元器件精度影响大,且不易控制;
2)利用专用SPWM集成芯片,其优点是电路简单,集成度高,缺点是无法全面实现对系统的反馈控制、监视管理和保护工作,故一般也要配合单片机实现;
3)利用单片机等微处理器产生SPWM波,此方法控制电路简单,调节灵活,硬件成本低。本文介绍一种利用PIC16F877A单片机实现SPWM波形的方法,并将其应用到全桥逆变电路中,验证了利用PIC单片机调制SPWM波的可行性。
1、系统总体设计
本系统从结构上看主要由单片机控制电路、驱动及逆变主电路组成。
1.1、单片机控制电路
1.1.1、PIC16F877A单片机主要功能简介
该系列单片机主要资源及功能有:
1)3个定时器,2个8位,1个16位;
2)8路10位A/D转换器,1个参考电压发生器,2个模拟电压发生器;
3)368字节(368×8位)的数据存储器;
4)上电复位(POR),掉电复位(BOR);
5)2个CCP模块,具有捕捉、比较、脉宽调制功能;
6)有两个8位定时/计数器TMR0、TMR2和一个16位定时/计数器TMR1,其中TMR2带有一个欲分频器、一个后分频器和一个周期寄存器。TMR2还是CCP模块中PWM工作方式下的时基。
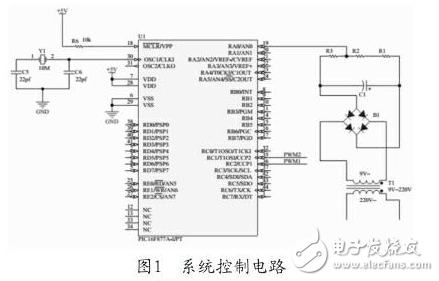
1.1.2、系统控制电路
本系统利用该系列单片机的CCP模块CCP1和CCP2输出两路互补SPWM波,然后通过反相器产生四路信号送至驱动电路。逆变输出电压具有稳压反馈功能,通过连接单片机RA0/AN0实现。系统控制电路如图1所示。
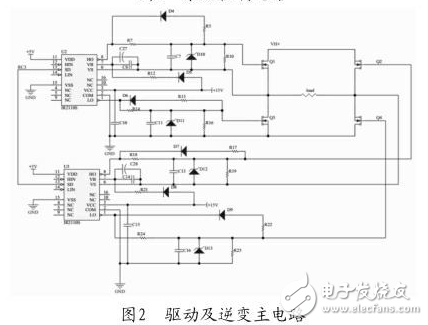
1.2、驱动及逆变主电路
本系统采用全桥逆变形式,驱动及逆变主电路如图2所示。当Q1,Q4导通时,Q2,Q3断开;当Q2,Q3导通时,Q1,Q4断开。驱动芯片采用IR2110,此芯片具有光耦隔离和电磁隔离的优点,悬浮电源采用自举电路,独立的功率地和逻辑地,使得芯片结构更加可靠。
2、软件设计
2.1、PWM周期设定
实验中,PIC单片机采用10MHz晶振,SPWM的频率定为10kHz,因此单片机每执行一个指令,周期为0.4us。PIC单片机CCP模块产生SPWM需要TMR2定时器配合完成。其中占空比控制由寄存器CCPRxH和CCPRxL完成,PWM周期的设定由寄存器PR2控制,PWM周期计算公式如下:
(PWM)周期=(PR2+1)×4×Tosc×(TMR2)预分频其中Tosc为1/10MHz,TMR2预分频设为1:4,由此计算得PR2=62。
2.2、SPWM软件实现过程
在MPLABIDE编译环境下采用c语言进行编译,设置相关寄存器,使能TMR2定时器,从0开始计数,同时CCP模块引脚输出高电平。在PWM模式下,TMR2计数将同步进行两次比较:1)当TMR2≥CCPRxL时,CCPx引脚输出低电平;2)当TMR2≥PR2时,TMR2被清零,CCPx引脚输出高电平,PWM占空比从CCPRxL复制到CCPRxH中锁存。同时TMR2的中断标志位被系统置高,即TMR2IF=1,转去执行中断程序。
程序中脉宽表共有100个数值,100个脉宽值对应半个周期,存储在单片机ROM中以供调用。中断程序每运行一次,更新一次脉宽值。当计数Count≤100时,脉宽值存入CCPR1L中,CCPR2L=0;当100
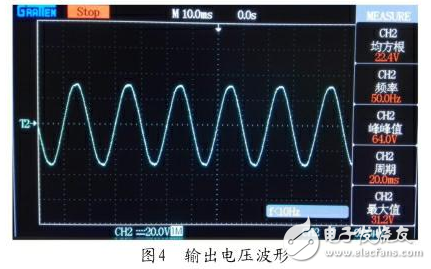
3、实验分析
逆变器接阻性负载,输出稳定的正弦波,输出端检测的电压波形如图4所示,此时电压为224V,频率50Hz,满足工频要求,且正弦性好。
4、结论
基于PIC单片机控制的正弦波逆变器,电路简单,成本低廉。采用软硬结合的方式控制的SPWM波输出精度高,调节灵活、性能可靠。实验结果证明,该逆变器的电压和频率稳定,总谐波含量THD低,正弦性好,在日益发展的电力电子技术领域具有较好的应用前景。
-
正弦波逆变器什么意思 正弦波逆变器和普通逆变器有什么区别?2024-02-01 6052
-
纯正弦波逆变器和修正弦波逆变器的区别2024-01-23 12221
-
基于单片机的正弦波输出逆变电源的设计与实现2023-11-13 498
-
单片机制作的高频正弦波逆变器2023-09-21 625
-
纯正弦波逆变器、修正弦波逆变器和方波逆变器介绍2022-04-16 6885
-
基于单片机正弦波三角波锯齿波方波波形仿真2021-11-23 2223
-
spwm单片机4路输出C语言,基于PIC单片机的正弦波逆变器设计与实现2021-11-08 750
-
使用单片机和DAC0832产生正弦波2021-09-16 1669
-
使用单片机的DA转换实现正弦波的程序免费下载2019-08-15 1517
-
正弦波逆变器介绍_正弦波逆变器工作原理2018-05-29 52095
-
什么是正弦波逆变器_正弦波逆变器的工作原理及相关电路图2017-11-20 89973
-
pic50Hz正弦波2016-07-22 1712
-
单片机的正弦波逆变电源电路2011-06-29 4881
-
正弦波逆变器原理图2009-11-03 4273
全部0条评论

快来发表一下你的评论吧 !
