

掌握串口通信协议的收发过程
电子说
描述
(3)、发送秩序。低位先发。(4)、波特率。收发双方共同约定的一个数据位(0或1)在数据传输线上维持的时间。也可理解为每秒可以传输的位数。常用的波特率有300bit/s, 600bit/s, 2400bit/s, 4800bit/s, 9600bit/s。(5)、通信的起始信号。发送方在没有发送数据时,应该将Tx置1 。 当需发送时,先将Tx置0,并且保持1位的时间。接受方不断地侦测Rx,如果发现Rx常时间变高后,突然被拉低(置为0),则视为发送方将要发送数据,迅速启动自己的定时器,从而保证了收发双方定时器同步定时。
(6)、停止信号。发送方发送完最后一个有效位时,必须再将Tx保持1位的时间,即为停止位。
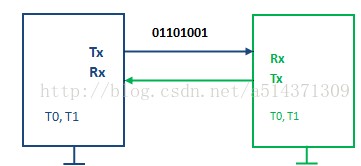
好了,理论暂时到这里,现在我们要做一个实验,将一个字节从51单片机发送到电脑串口调试助手上。这个实验的目的是为了掌握串口通信协议的收发过程。
虚拟串口
实验一、虚拟串口实验
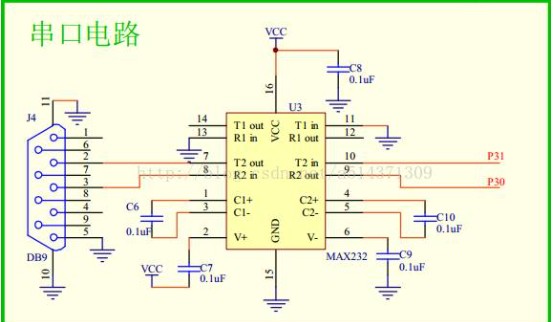
一般单片机都有专门的串口引脚,51里面分别是P3.0和P3.1,这些引脚拥有串口的硬件电路,因此使用它们并不需要设置信号的发送停止。为了掌握协议,我们使用其他的引脚来模拟串口,所以也叫虚拟串口。这里我们选用P1.0,然而注意到我们51单片机要发送数据给电脑,必须经过一个串口转USB设备(即TTL电平转换为RS232电平),而限于我们的开发板只有P3.0与P3.1连接到了串口转USB设备,所以我们可以将P1.0短接到P3.1 。 下图是这个串口转USB的原理图。
好了直接上代码吧。
[cpp]view plaincopy
-
#include "reg51.h"
-
/*
-
将P1.0虚拟成串口发送脚TX
-
以9600bit/s的比特率向外发送数据
-
因为波特率是 9600bit/s
-
所以me发送一位的时间是 t=1000000us/9600=104us
-
*/
-
sbit TX=P3^1; //P1^0 output TTL signal, need to transferred to rs232 signal, can be connected to P3^1
-
#define u16 unsigned int //宏定义
-
#define u8 unsigned char
-
u8 sbuf;
-
bit ti=0;
-
void delay(u16 x)
-
{
-
while(x--);
-
}
-
void Timer0_Init()
-
{
-
TMOD |= 0x01;
-
TH0=65440/256;
-
TH0=65440%256;
-
TR0=0;
-
}
-
void Isr_Init()
-
{
-
EA=1;
-
ET0=1;
-
}
-
void Send_Byte(u8 dat)
-
{
-
sbuf=dat;//通过引入全局变量sbuf,可以保存形参dat
-
TX=0; //A 起始位
-
TR0=1;
-
while(ti==0); //等待发送完成
-
ti=0; //清除发送完成标志
-
}
-
void TF0_isr() interrupt 1 //每104us进入一次中断
-
{
-
static u8 i; //记录进入中断的次数
-
TH0=65440/256;
-
TL0=65440%256;
-
i++;
-
if(i>=1 && i<=8)
-
{
-
if((sbuf&(1<<(i-1)))==0) // (sbuf&(1<<(i-1)))表示取出i-1位
-
{
-
TX=0;
-
}
-
else
-
{
-
TX=1;
-
}
-
}
-
if(i==9) //停止位
-
{
-
TX=1;
-
}
-
if(i==10)
-
{
-
TR0=0;
-
i=0;
-
ti=1; //发送完成
-
}
-
}
-
void main()
-
{
-
TX=1; //使TX处于空闲状态
-
Timer0_Init();
-
Isr_Init();
-
while(1)
-
{
-
Send_Byte(65); //0x41
-
delay(60000);
-
}
-
}
实验引入了定时器0来控制发送线上的各个位的保持时间。首先main函数进入,TX置1则使发送线处于空闲,这时候发送方和接受方都处于空闲。接下来初始化定时器0,TR0置0表示还不要启动定时器0。接着中断系统初始化,此时中断系统已经开启。进入while循环,先进Send_Byte()函数,将65传给形参dat,dat再将65赋值给sbuf,到这里准备工作就做好了。接着TX置0,这个是起始位,要保持这个起始位104us。于是就启动定时器TR0置1,计时器开始计数。当第一次溢出的时候,也就是过了104us,进入中断,同时接收方也侦测到了这个突然被拉低的信号,于是迅速启动自己的定时器。进入中断子函数后,先是重装定时器初值,然后i加1,也就是当i=1时,就应该发送数据的最低位了,总共有8位数据,所以使用条件语句if(i>=1 && i<=8)来判断是否发送完数据位。然后再通过if(i==9) 来发送停止位,最后当i=10时,也就是发送完了,这时候要关闭定时器(那么程序也就),同时i置0,ti置1(才能跳出while(ti==0)循环),最后将ti置0,保证下次要发送字节时让程序停留在while(ti==0)。
片上串口
以上说的是虚拟串口,上文中谈到与串口相关的引脚P3.0与P3.1,事实上51单片机自带片上串口,那这个串口又该怎么使用呢?
片上串口支持同步模式与异步模式。简单来说同步模式就是指有时钟线,而异步模式无时钟线。这里的时钟线是指在同步通信时,用一根线专门传输时钟信号,这个信号用来与要发送的每一位保持同步,这样就避免了例如异步通信中因为采用定时器而引入的时间误差。
片上串口还支持8位模式和9位模式。如下图所示
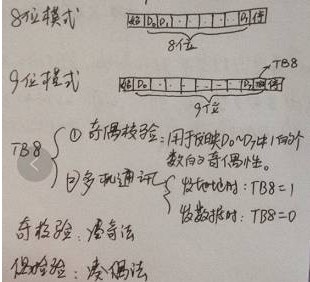
其中D0-D7是一个字节的8个位。9位模式只是多了一个位TB8,这个TB8的作用是奇偶校验或多机通信。奇偶校验原理这不加分析。多机通信时比如主机只发送数据给网络中的一台地址为0x02的设备,这时候先让TB8为1,前面的D0-D7则为地址即0x02,之后再让TB8为0,前面的D0-D7则为数据了。
上面设置了片上串口的模式,另外还要设置串口的波特率。
片上串口的波特率等于定时器1工作在方式2时溢出率的32分频。如果要定时器1工作在方式2,那么TMOD=0x20。另外要保证为32分频,我们还必须设置计数器初值。设晶振为11.0592Mhz,则定时器的计数脉冲为F=f/12,则定时器每计一个脉冲的时间为T=12/f。又令计数器的起点为x,则溢出一次要计的脉冲数为(256-x)。所以在计数起点为x时,溢出一次的时间为t=12/f*(256-x)。则对应的溢出率为1/t=f/(12*(256-x))。对应的波特率就为b=f/(384*(256-x))。
x=256-f/(384*b)
其中f为晶振频率,b为希望的波特率,x为定时器的计数起点TH1的值。
例如当晶振为11.0592M,希望波特率为9600bit/s,则TH1=253。题外话,我们同样可以演算出在其他常用波特率情况下,TH1始终为一个整数。这里也就解释了为什么51里面选用了11.0592M的晶振而不是12M,这样就保证了串口的时序更加准确,虽然牺牲了定时器的准确度。
实验二,片外串口发送一个字节。
好了现在开始我们的实验之旅。直接看代码吧。
[cpp]view plaincopy
-
#include "reg51.h"
-
#define u16 unsigned int
-
#define u8 unsigned char
-
void delay(u16 x)
-
{
-
while(x--);
-
}
-
void Uart_Init() //串口初始化
-
{
-
SCON=0x50; //8位异步模式
-
TMOD|=0x20; //定时器1工作方式2
-
TH1=253;//9600bit/s
-
TR1=1;
-
}
-
void Send_Byte(u8 dat)
-
{
-
SBUF=dat; //启动发送,只需要把发送内容给SBUF这个寄存器
-
while(TI==0); //等待发送完成,因为TI为1时表示在发送停止位
-
TI=0;
-
}
-
void main()
-
{
-
Uart_Init();
-
while(1)
-
{
-
Send_Byte('m');
-
delay(60000);
-
}
-
}
实验二较之实验一,代码减少了很多,而且不用考虑繁琐的位发送时序。只需要明白各个寄存器SCON,TMOD,TCON,SBUF的用法。TI是SCON中的第一位,为发送中断请求标志位。在本方式中,在停止位开始发送时由内部硬件置位,响应中断后TI必须又软件清零。
实验三、片上串口发送一个字符串
上面介绍了如何发送一个字节,那如何发送一个字符串甚至文本呢?这里我们首先介绍下字符串的概念。
字符串:从存储器的某个地址开始,连续存放多个字符的ASCII码,并且在最后一个字符的后面存放一个0,这段连续的内存空间就叫字符串,最后的0叫字符串的结束符。注意这里的0和加单引号的0不是一个概念,加单引号的0是指0的ASCII码。
数组与字符串的关系:字符串是数组的一种特殊情况,数组在特定条件下可当做字符串用。C语言用双引号描述一个字符串,如“abcd”。
下面我们通过一个实验来展示如何发送字符串。我们实验的目标是打印字符串“Hello World ! 第一!”到打印机。直接上代码。
[cpp]view plaincopy
-
#include "reg51.h"
-
#define u16 unsigned int
-
#define u8 unsigned char
-
void delay(u16 x)
-
{
-
while(x--);
-
}
-
void Uart_Init() //串口初始化
-
{
-
SCON=0x50; //8位异步模式
-
TMOD|=0x20; //定时器1工作方式2
-
TH1=253;//9600bit/s
-
TR1=1;
-
}
-
void Send_Byte(u8 dat) //串口发送一个字节
-
{
-
SBUF=dat; //启动发送,只需要把发送内容给SBUF这个寄存器
-
while(TI==0); //等待发送完成,因为TI为1时表示在发送停止位
-
TI=0;
-
}
-
void Send_String(u8 *str) //发送一个字符串 *str为字符串第一个字符的地址
-
{
-
abc: //标号
-
if(*str != 0)
-
{
-
Send_Byte(*str);
-
str++;
-
goto abc;
-
}
-
}
-
void main()
-
{
-
Uart_Init();
-
while(1)
-
{
-
Send_String("Hello World! 第一!");
-
Send_Byte(10);
-
delay(60000);
-
delay(60000);
-
}
-
}
-
通用异步收发传输器UART串口通信协议有哪些特性呢2021-11-01 0
-
单线串口通信协议2021-12-07 0
-
掌握通信协议的研究方法2022-01-13 0
-
什么是串口通信?串口通信协议了解2022-02-15 0
-
串口通信协议的相关资料分享2022-02-17 0
-
SPI通信协议的通信过程是怎样的?2022-02-17 0
-
串口通信协议详解2011-11-09 8685
-
基于状态机的串口通信协议的设计与实现2012-05-08 1889
-
PC与单片机串口通信协议2016-12-26 851
-
科尔摩根伺服驱动器串口通信协议2017-09-03 1440
-
单片机C语言之串口通信协议2018-05-22 4882
-
西门子PLC串口协议与以太网通信协议对比2022-12-30 1548
-
UART串口通信协议是什么?2024-03-19 1260
-
串口通信协议解析 串口通信应用实例2024-11-21 283
全部0条评论

快来发表一下你的评论吧 !
