

 SSI绝对值编码器在EtherCAT运动控制器中的应用
SSI绝对值编码器在EtherCAT运动控制器中的应用
电子说
描述
本文导读
上节课程,正运动小助手给大家分享了ZMC432-V2控制器怎么去读取BissC绝对值编码器反馈的位置。详情点击→BissC绝对值编码器在EtherCAT运动控制器中的应用。
今天,正运动小助手给大家分享ZMC432-V2控制器怎么去读取SSI多圈绝对值编码器反馈的位置。
ZMC432-V2硬件介绍
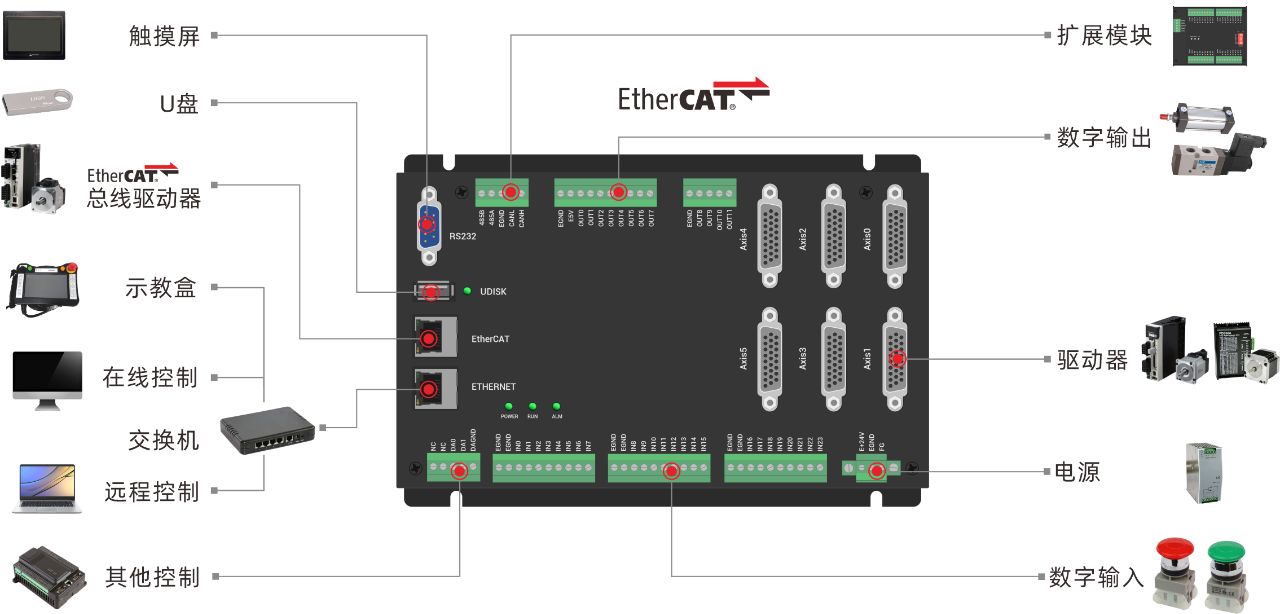
ZMC432-V2是正运动推出的一款多轴高性能EtherCAT总线+脉冲型运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。
ZMC432-V2最多可支持32轴运动控制,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。
ZMC432-V2运动控制器包含6轴的脉冲输出与编码器反馈输入,通用IO包含24路输入口和12个输出口;通用DA有两路;其中特定输出口支持高速PWM控制;EtherCAT最快125us的刷新周期。
ZMC432-V2支持PLC、Basic、HMI组态三种编程方式。PC上位机API编程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

控制器型号要求
(1)控制器型号要求:ZMC432-V2,ZMC406-V2;(2)固件版本要求:在4.930-20190305以后才支持;(3)ZMC432-V2系列控制器仅AXIS4/5轴接口支持SSI/BISS通讯。

▶▶▶ ZMC432-V2硬件接口及接线
ZMC432-V2控制器AXIS4/5轴接口支持SSI/BISS通讯协议,只支持5V供电的SSI绝对值编码器,不论SSI绝对值编码器是否使用+5V作为电源,SSI绝对值编码器公共端都必须跟控制器轴接口GND连接。
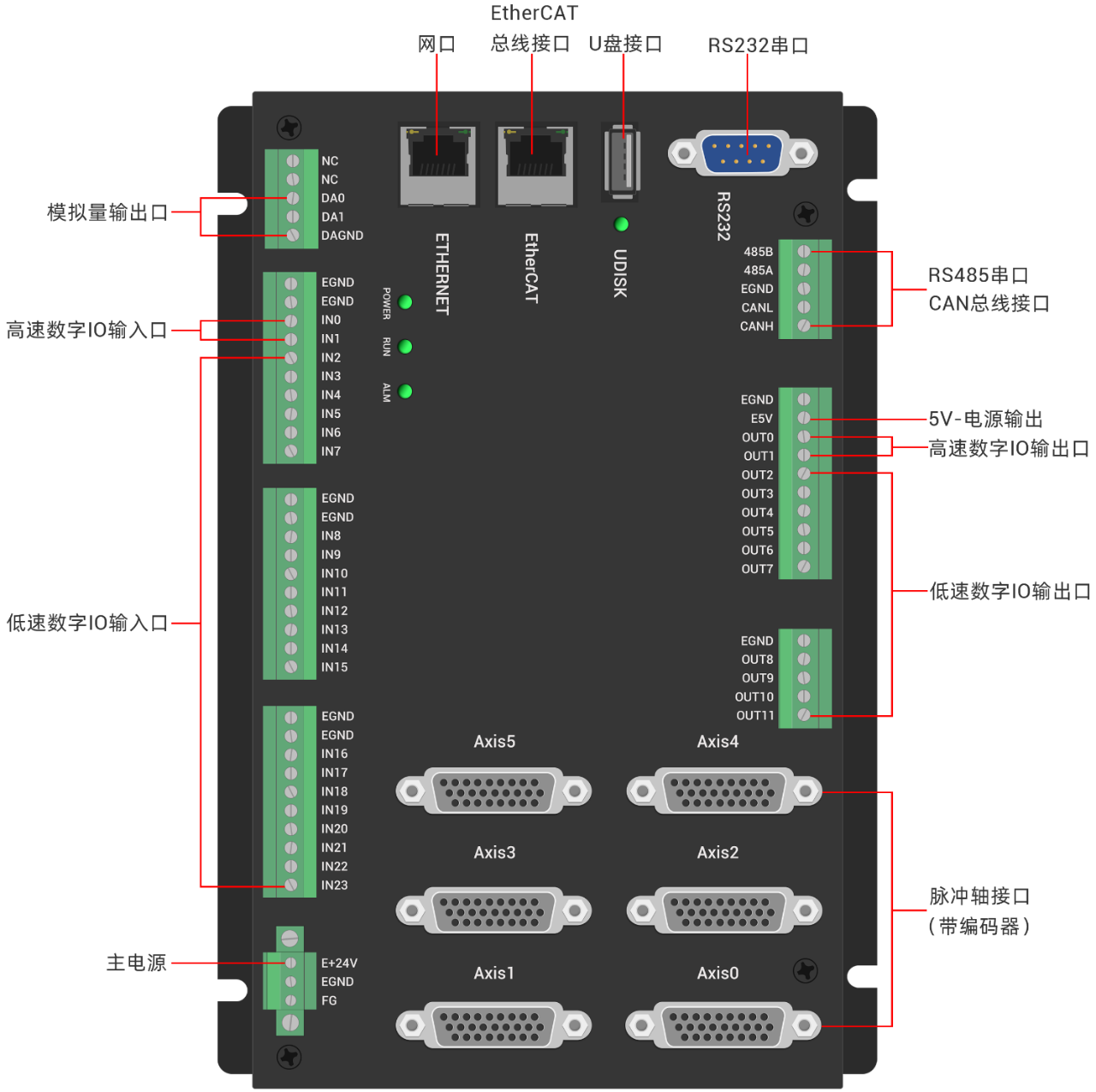
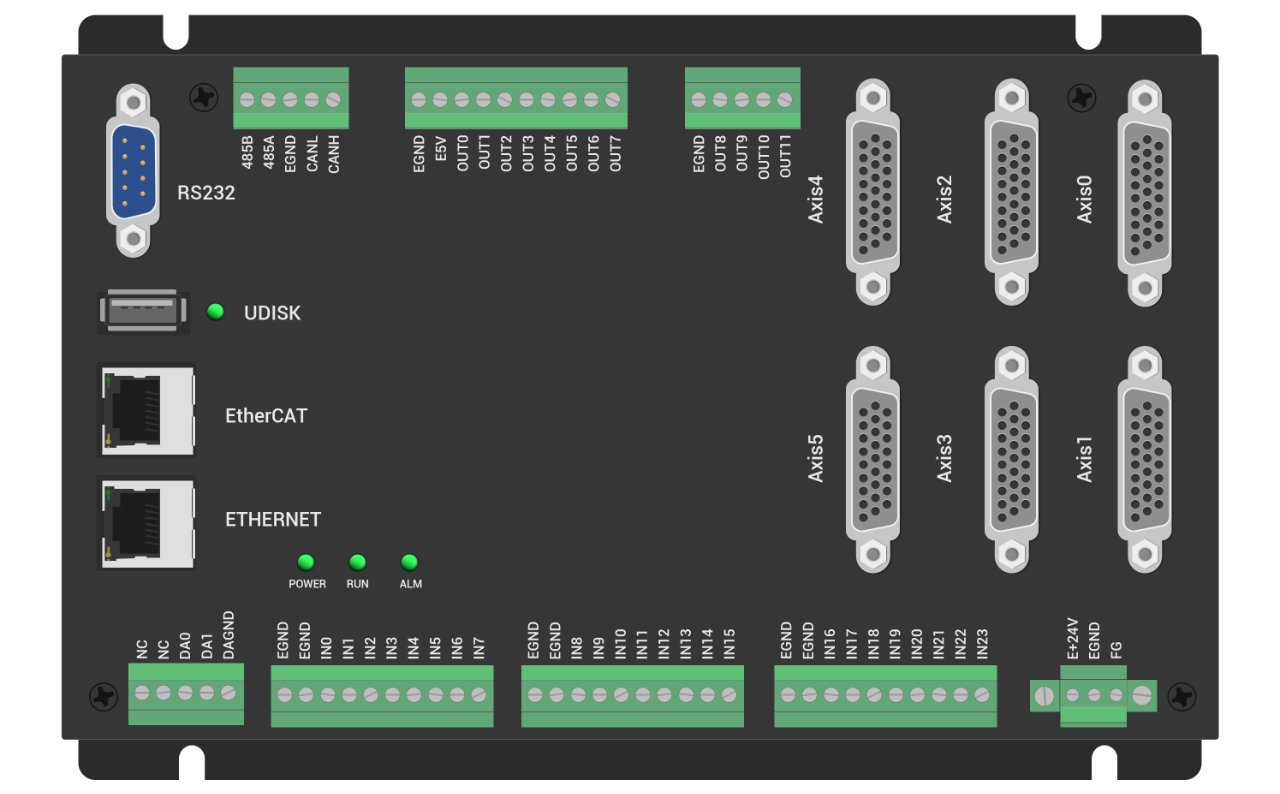
ZMC432-V2控制器接口定义
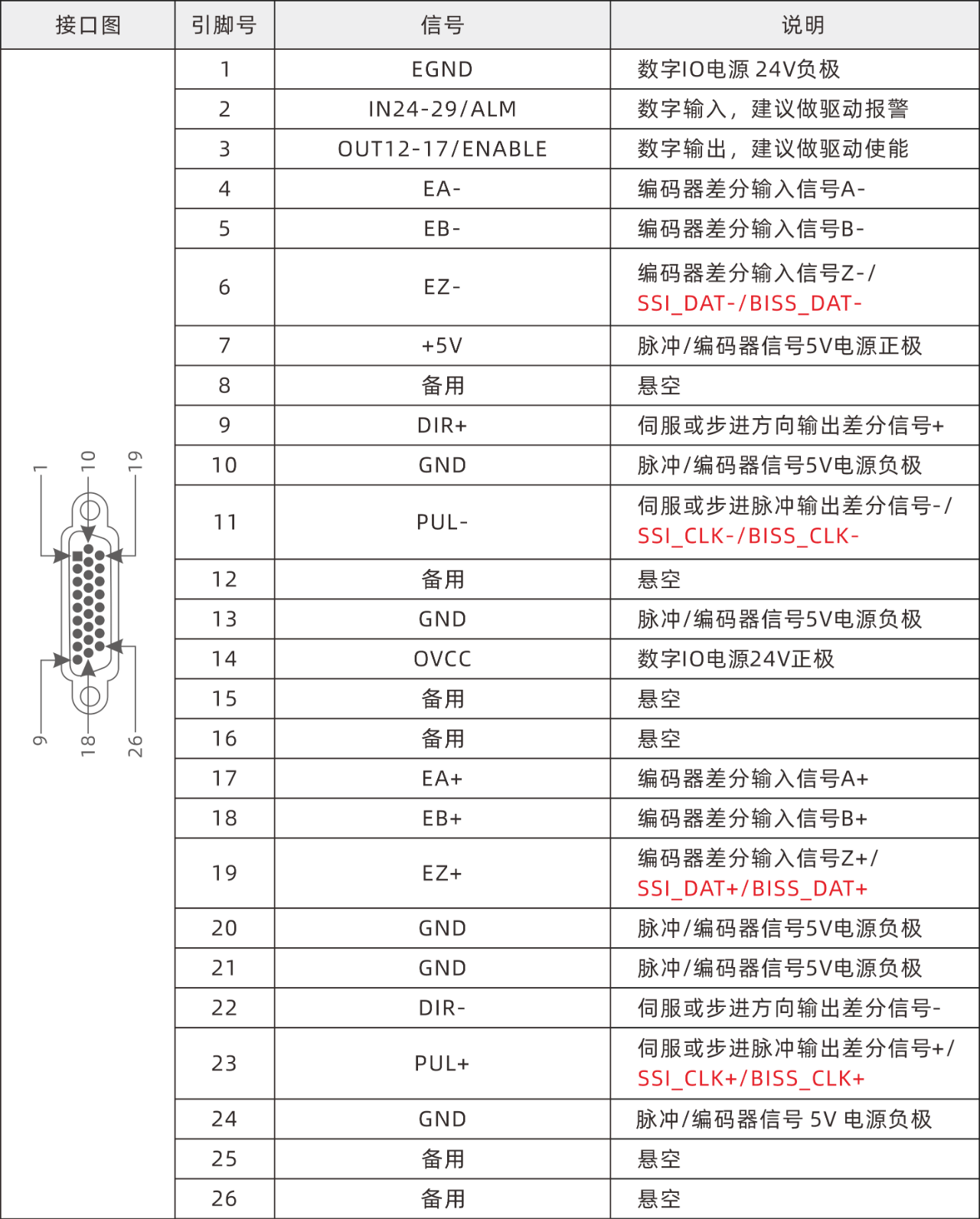
控制器AXIS4/5轴接口SSI/BISS针脚定义图
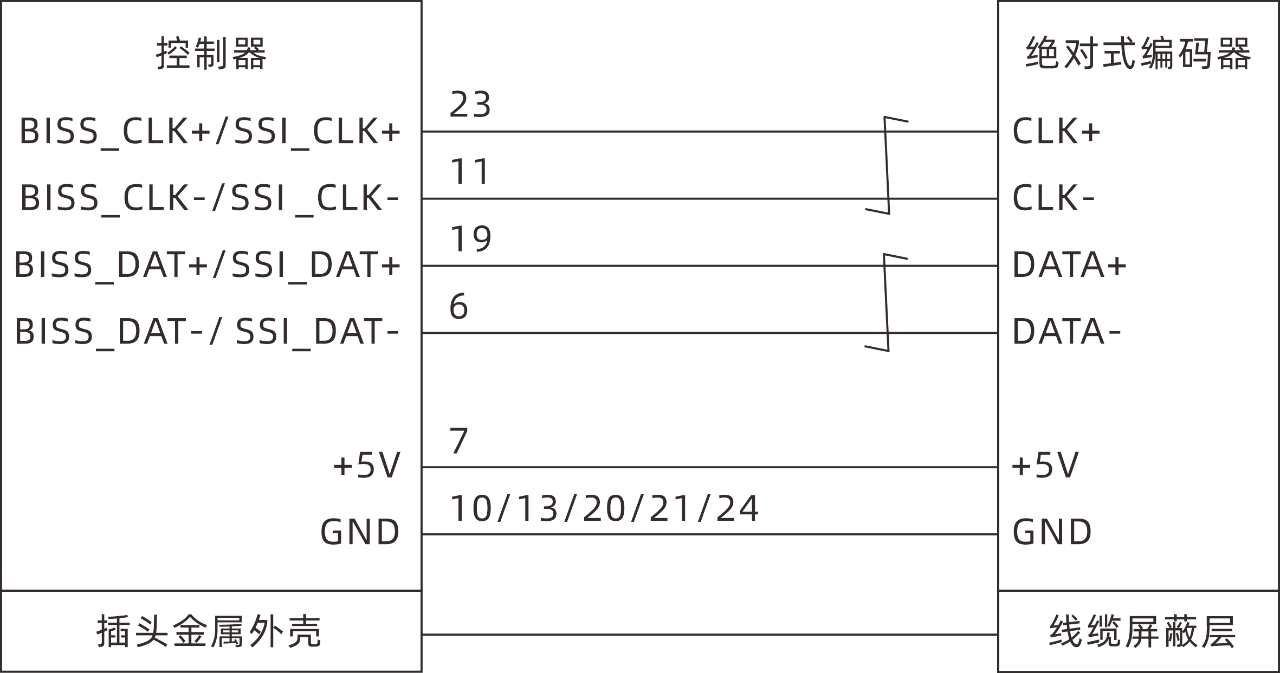
控制器和SSI绝对值编码器接线图
▶▶▶ SSI绝对编码器介绍
1.认识SSI绝对值编码器
SSI是Synchronous Serial Interface的缩写,它是一种数字式的接口协议。
SSI绝对值编码器是一种测量位置和角度的设备。SSI接口工作原理相对简单,但具备高度的可靠性和精确性,在工业领域中有着广泛应用。

SSI绝对值编码器
2.SSI通讯原理
SSI是一种用于运动控制与绝对式编码器之间进行数据交换的通信协议。它采用同步串行接口模式,具有主-从接口的特点。数据通过控制器提供的时钟信号或脉冲从编码器同步传输到控制器。编码器输出可以是二进制或格雷码。通过两根线进行数据传输:数据线(Data)和时钟线(Clock)。将位置信息转换为二进制码,并将其编码成串行数据,时钟信号控制数据的传输速率。
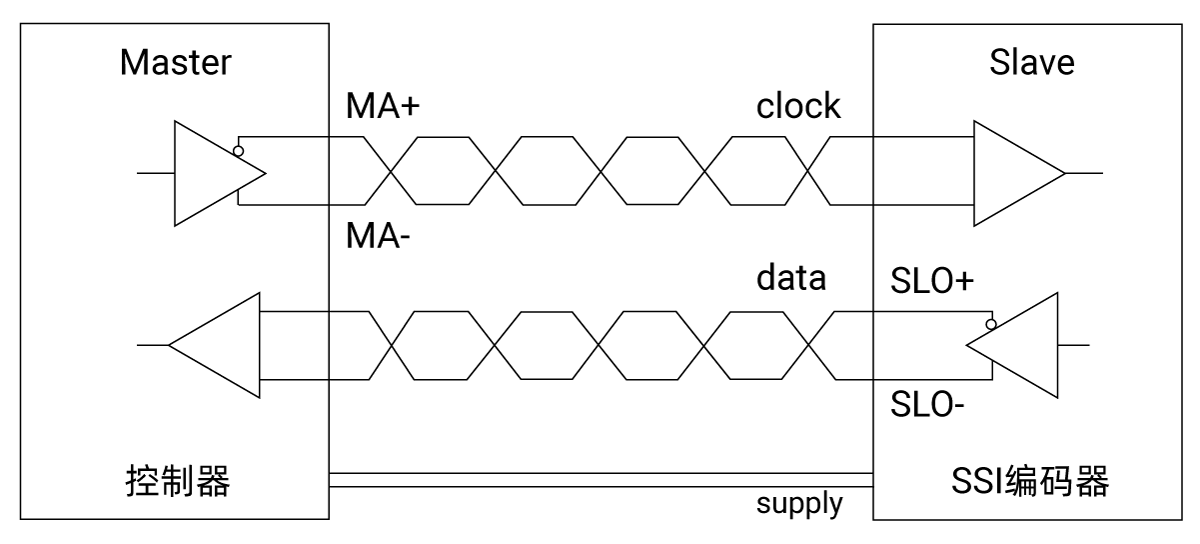
SSI接口示意图
▶▶▶ 控制器程序配置及应用
1.控制器参数说明
(1)ATYPE:设置轴类型,设为48是SSI绝对值编码器,设为49是BISS绝对值编码器。
(2)UNITS:设置脉冲当量,以SSI绝对值编码器为例,分辨率是16位,那么1圈脉冲数是65535,控制器需要参考这个参数去设置该轴的脉冲当量UNITS。
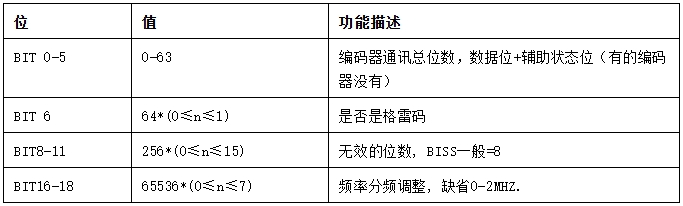
(3)ENCODER_BITS:设置SSI/BISS编码器绝对值位数,参考SSI绝对值编码器手册数据位。
(4)ENCODER_BITS指令参数设定说明:
2.程序配置
global CONST ENC_AxisStart = 4 '本地绝对值编码器轴起始轴号 global CONST ENC_AxisNum = 2 '本地绝对值编码器轴轴数量 '本地绝对值编码器轴配置 for i = 0 to ENC_AxisNum - 1 BASE(ENC_AxisStart + i) AXIS_ADDRESS=(-1< <16)+4+i '映射绝对值编码器轴4,5 ENCODER_BITS =26 '26位绝对值. ATYPE=48 'SSI绝对值编码器 Next
3.零点设置
(1)一般绝对值编码器通过信号去设置零点位置。
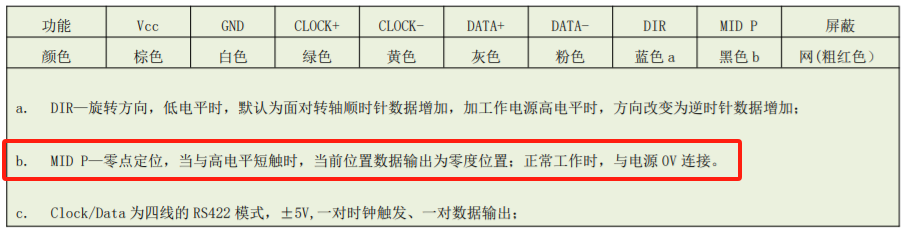
(2)其它方式去设置零点位置,咨询编码器厂家。
4.绝对值编码器位置读取
在零点位置进行编码器位置清零后,设置UNITS,读轴4/5的MPOS值就知道编码器的当前位置,需要编码器原始值就读轴4/5的ENCODER。SSI绝对值编码器位置具有断电保存功能。
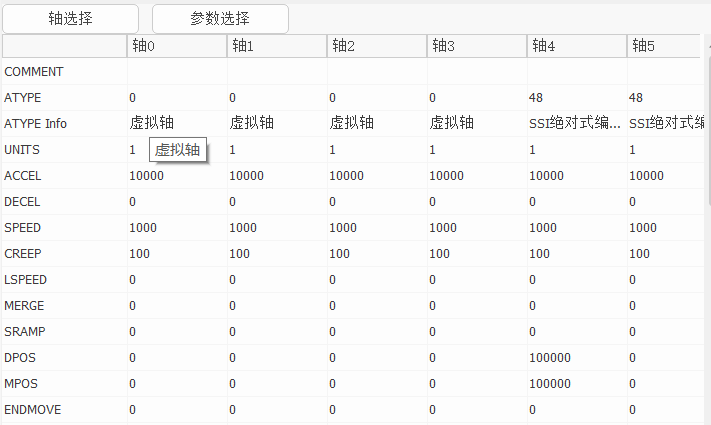
轴4SSI绝对值编码器位置MPOS
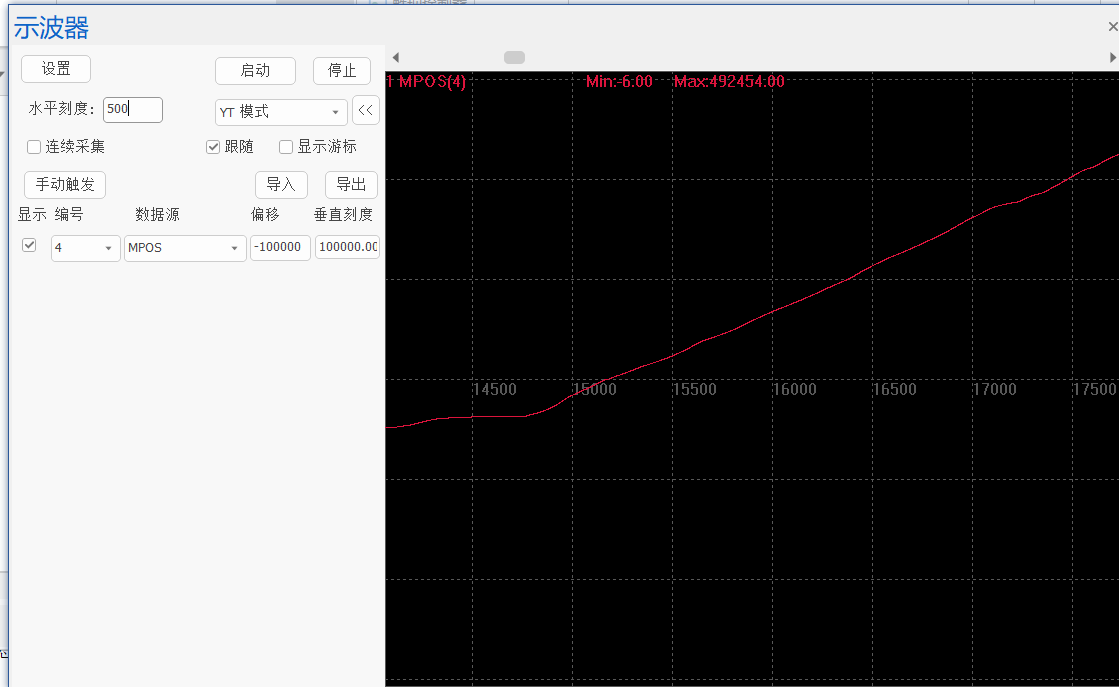
手动旋转SSI绝对值编码器示波器抓取位置曲线
常见问题
1.下载程序提示轴4/5报设置atype48错误
检查控制器固件版本支不支持ssi/biss绝对值编码器,固件版本20190305以后才支持ssi/biss绝对值编码器。
2.轴4/5的MPOS没有值,或值不对
检测接线问题。encoder_bits参数设置问题。在线命令?* encoder_bits,检查该参数是否设置有效。
本次,正运动技术SSI绝对值编码器在EtherCAT运动控制器中的应用,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。
审核编辑 黄宇
- 相关推荐
- 热点推荐
- 运动控制器
- EtherCAT总线
- 正运动技术
-
绝对值编码器是什么?有哪些特点呢2024-12-17 2973
-
增量编码器与绝对值编码器的区别2024-11-18 4475
-
BissC绝对值编码器在EtherCAT运动控制器中的应用2024-07-24 2966
-
绝对值编码器的工作原理及其在电机控制中的应用2024-05-21 3058
-
EtherCAT信号绝对值编码器的定义和应用2023-11-08 2425
-
一体式伺服中的编码器起什么作用?什么时候使用多圈绝对值编码器?2023-10-23 3158
-
绝对值编码器:输出信号与误差分析2023-10-07 3885
-
增量式编码器和绝对值编码器有哪些区别?2023-07-05 6278
-
单圈绝对值编码器2023-04-25 5111
-
什么是绝对值编码器?2023-03-24 6591
-
增量式编码器和绝对值编码器选哪个?2023-03-19 5579
-
为什么伺服厂家都爱选绝对值编码器?2023-03-13 2756
-
绝对式编码器的特点_绝对值编码器应用2019-11-06 14480
-
绝对值编码器安装2018-12-06 14411
全部0条评论

快来发表一下你的评论吧 !
