

无人驾驶技术哪家厉害_美国无人驾驶技术领先中国多少?
智能驾驶
描述
无人驾驶汽车
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目标。
据汤森路透知识产权与科技最新报告显示,2010年到 2015年间,与汽车无人驾驶技术相关的发明专利超过22,000件,并且在此过程中,部分企业已崭露头角,成为该领域的行业领导者。
无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。
它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。
集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工业水平的一个重要标志,在国防和国民经济领域具有广阔的应用前景。
无人驾驶技术哪家强?
外媒最新公布的榜单显示,谷歌旗下的自动驾驶公司Waymo的综合评分位列第一。来自中国的百度排名第七,滴滴则成为17家公司中在无人驾驶领域评分最低的一家。6月13日,美国科技媒体The Information通过采访和调研对当今主要的17家发展L4级别及以上无人驾驶技术的公司进行了一次综合评估和排名。
其中,谷歌母公司Alphabet旗下的Waymo获得了接近满分的13分位列第一,Uber以1分之差名列第二,德国老牌汽车制造商戴姆勒和美国汽车零配件供应商德尔福则并列第三名。
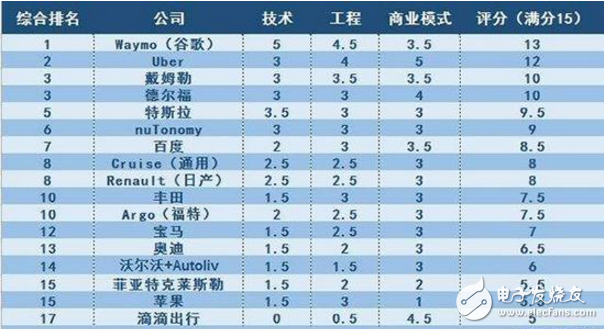
外媒排名自动驾驶技术:谷歌夺冠百度第7苹果倒数
The Information主要从技术、工程、商业模式三个指标对上述公司进行了打分。其中,Waymo是唯一个在技术上获得满分5分的公司,并且与第二名的3分拉开了较大距离,这意味着Waymo在技术上已经具有了较大的领先优势。同时,仅有Waymo与Uber在工程这一项中获得4分及以上的分数。
The Information分析认为,目前在无人驾驶的关键领域,像Waymo和Uber这样的科技公司已经建立了显著优势,将传统车企甩在身后。
Uber则是唯一一个在商业模式上获得满分的公司,被称为中国版Uber的滴滴出行也在该项中获得了4.5分。
目前业界普遍认为,在未来无人驾驶与共享出行的结合将带来较大的商业机会。而在此次上榜的公司中,大多数均在共享出行或乘车服务方面有所布局,譬如通用汽车拥有Maven并获得了Lyft的大量股权,宝马拥有DriveNow,戴姆勒拥有Car2Go等。
这份榜单也对两家中国公司进行了评价——百度以总分8.5分排名第七,在三项指标的打分中均表现平平。目前,自动驾驶在百度内部被提升到了较高的战略地位。该公司在今年4月提出了“阿波罗计划”,将把自动驾驶软件向全行业开源。
另一家中国公司是滴滴出行,但它在17家公司中名列最末,尤其在技术上获得了唯一的零分。不过,这或与滴滴在部署无人驾驶上起步较晚有关,该公司已经在加大对该领域的投入。据悉,滴滴出行目前聘请了Uber的自动驾驶项目的著名安全工程师查理·米勒(Charlie Miller),并且挖来了Waymo专门从事对象检测的工程师。
令人吃惊的是,科技巨头苹果公司却在这份名单中成了“吊车尾”——总分5.5,与菲亚特克莱斯勒并列15名。苹果公司是较早布局无人驾驶的科技公司之一,在两年前公司就启动了专门的无人车项目“Project Titan”,并为之成立了专门的部门。但可惜的是,该项目进展相当缓慢,并于去年裁撤了专门的汽车部门。外媒消息称,苹果或将放弃独立造车的计划,转而与成熟的汽车厂商合作开发。
综合来看,The Information的这份调研结果显示,在较高级别的自动驾驶领域,传统汽车制造商并不具备优势,这与此前另一家机构的排名有较大出入。
今年4月,市场调研机构Navigant Research公布的全球自动驾驶全球实力排名显示,传统车厂获得了压倒性的优势,福特汽车排名第一,紧随其后的是通用,前五名当中的另外三家分别为雷诺日产联盟、戴姆勒和大众。大众眼中的明星公司谷歌仅排第7位,而同为科技公司的Uber和百度甚至没能进入前十。
Navigant Research 的报告总共探讨了18家领先公司开发自动驾驶系统的策略和执行情况,目的是对全球自动驾驶系统市场的相对优势和劣势进行客观评估。其中包含10个评判标准,分别为:视力;市场策略;伙伴;生产策略;技术;销售;营销和分销;产品能力;产品质量可靠;产品介绍;持续活力。
该报告将自动驾驶公司分为引领者、竞争者、挑战者和跟随者四类,处于引领地位的三家公司——福特、通用、戴姆勒——事实上同时也是传统汽车行业的巨头。谷歌母公司的Waymo、特斯拉被归为竞争者一类,而百度和Uber则被放在第三梯队的挑战者中。
这份报告同时也指出,自动驾驶领域的竞争是一场旷日持久的军备竞赛,随着技术的发展和这些企业未来战略的发布,种种因素都会影响排名,很难出现常胜将军,这一领域的企业将呈现动态排名。
美国无人驾驶技术领先中国多少?
自动驾驶是早晚的事,现在看来,自动驾驶的普及速度比预想的还要快。
自动驾驶一旦大规模普及,很多功能将会成为现实,比如:车辆可以像动车一样编组运行以实现同步高速度的交通,车与车之间的通讯和交互可以实现高效的通行效率和极低的事故率,甚至不需要红绿灯及各种复杂的交通标志标线系统,总体的交通效率和安全性将大大提高,是革命性的。
用不了多久,就会有人说:“开车这么危险的事情,以前竟然让人去做,这简直太吓人了,不可想象。”,当然“女司机”这个说法可能也要退出历史舞台了。
很多朋友担心交通基础设施以及法律责任等问题,我觉得这点不用太担心,自动驾驶普及的过程,也是相关的交通技术设施和法律不断完善的过程。
今天主要分析一下自动驾驶的技术层面,其他相关的道路设施及法律责任等问题在这里不讨论了。
首先简单说一下自动驾驶的原理。
所有的控制系统都是由传感器、控制器和执行器组成的,从这个角度上讲,自动驾驶原理其实和人工驾驶是一样的,我们用眼睛观察路况,而自动驾驶则是使用激光雷达、超声波雷达、摄像头、GPS等传感器来观察路况确定位置。我们用大脑做判断,自动驾驶当然就是用电脑作为控制器来判断。然后我们通过手脚控制车辆方向盘、加速和刹车,自动驾驶也是根据电脑的输出直接去控制车辆。
看上去很简单,但是要深入分析的话,特别是汽车这么危险的东西,要想保证自动驾驶的可靠性的话,其实非常复杂。
传感器方面,激光雷达和超声波雷达当然都是用来测距的,理想状态下车辆可以探测到周围所有的障碍物并算出这些障碍物的距离,但是实际上,这些障碍物很可能会被误判,比如风中飞舞的塑料袋会被判断为障碍物,甚至雨滴有可能被认为是障碍物。摄像头更不用说了,单目或多目摄像头利用计算机视觉让自动驾驶汽车实时识别交通信号灯、交通标志、车道线、近距离低速障碍物等,同时加上与道路基础设施以及云端数据库的通信,实现诸多功能。但是,今年特斯拉自动驾驶出现的死亡事故很大程度上与摄像头有关系。在逆光和大光比的情况下,摄像头的分辨能力就降低了,当然还有低照度情况,这个受限于当前的图像传感器技术,懂摄影的朋友都会知道,机器视觉本来就是一个复杂的东西,同时摄像头有可能被灰尘、眩光等各种不利因素影响,所有从可靠性上讲,依然存在很多问题。当然除了这些判断路况的传感器,汽车还有车速、加速度、转角度等各种传感器。
控制中心方面,接收这么多传感器的信息,进行分析处理,得出控制策略,下达控制指令,并且这个过程必须实时,所以控制中心必须具备高性能的实时运算能力。就硬件来说,自动驾驶的过程可容不得死机,所以一般硬件都要用满足高可靠性高性能的实时运算。就软件来说,算法就太重要了,自动驾驶的软件算法必须实现路径规划、躲避障碍物、加速度控制、姿态控制等等多种功能,但是目前并没有哪种控制方式能实现完美的无人驾驶,很多时候厂家都会采用多种方式共同处理,比如模糊控制配合遗传算法、深度学习等等。作为也写了好多控制软件的答主来说,感觉这句话说的真是太对了:“99%的情况使用1%的代码就可以应付,而剩下的1%的情况需要用99%的代码去处理。”
执行器方面,一旦得到了控制指令,让汽车去执行,这一部分就目前来说还算是不错的,特别是电动车。电动机极高的效率、优良的调速性能、宽泛的调速区间决定了电动车更容易实现自动驾驶,而普通汽车经过多年的发展,其发动机自动控制系统、自动变速箱、电子制动等系统的控制也已成熟,ESP、TCS、定速巡航、自适应巡航等系统也已经广泛使用,与自动控制系统对接并不麻烦。
下面说说我国的无人驾驶研究情况和美国的研究进展情况,然后看看差距。
国内
国防科大早在1992年成功研制出中国第一辆真正意义上的无人驾驶汽车。2007年,与一汽共同研发红旗无人驾驶车,该车主要使用CCD图像传感器和激光雷达作为传感器,实现了高速路的无人驾驶。2011年国防科大自行研发的HQ3,实现了从长沙到武汉286公里的路试。
吉林大学研发了JLUIV-1型无人驾驶车,使用的是模糊控制加遗传算法修正的方式。
上海交大在2005年就与欧盟合作Cyber C3项目,研究面向城市环境的区域交通智能车辆。
2012年,军事交通学院的“猛狮三号”,配备5个雷达,3个CCD图像传感器,1个GPS,以无人驾驶状态行驶114公里,最高时速105km/h。
2016年,北京理工大学设计了一款无人驾驶赛车,使用了双目摄像头用于行人侦测、避障这样的局部路线规划。有意思的是,这车百公里加速仅3秒。
2013年,百度也开始搞自动驾驶汽车,2015年12月初,百度无人驾驶汽车在北京进行全程自动驾驶测跑,实现多次跟车减速、变道、超车、上下匝道、调头等复杂驾驶动作,完成了进入高速到驶出高速不同道路场景的切换,最高时速达100km/h。下图就是百度的无人驾驶车。
今年9月1日,百度宣布其获得美国加州第15张无人驾驶测试牌照。百度在无人驾驶方面投入可谓巨大,包括建立硅谷研发中心,联合福特公司投资激光雷达厂商Velodyne (为谷歌提供激光雷达),早前百度还公布了其“三年商用”、“五年量产”的目标。
国内刚刚起步的无人驾驶技术研究是成为很多高端人才的关注点,前面说的北理工搞无人驾驶车的负责人姜岩,和原Intel中国研究院院长吴甘沙一起成立的驭势科技,就是一家专门从事自动驾驶研究的公司,在双目视觉方面有着深厚的技术积累,提供低成本纯视觉的自动驾驶解决方案,在限制性环境的自动驾驶技术方面取得了相当的进展。当然类似的小公司还有很多,从不同的层面对自动驾驶技术展开研究。
以上使用的技术基本上都是以CCD图像传感器、雷达测距等技术,简单的高速路况下,几乎都已经可以实现不错的自动驾驶性能,但是城市道路路况,问题还是非常多,毕竟总体来看,国内的自动驾驶依然处于起步阶段,还处于研发的原型验证阶段,与美国差距不小(不光自动驾驶,很多方面都是)。百度在这方面算是国内的领头羊的,与NVIDIA合作,同时也和政府联手推动自动驾驶技术。但是从路试距离上来说,百度相比谷歌也差得远。类似驭势科技这种专业公司的出现,也为国内的自动驾驶研究增添了一支强劲的力量。
美国
当然最牛最有代表性的就是谷歌和特斯拉。
谷歌在软件方面一直就是世界最顶尖的,虽然微软和苹果可能表示不服气,但是我是这么认为的。
所以谷歌的强大优势就是软件和算法。下面就是谷歌的自动驾驶汽车。
谷歌的自动驾驶汽车具有GPS、摄像头、雷达和激光传感器,可以以一个360度的视角从周围环境中获取信息,从2009年开始,谷歌自动驾驶汽车在自主模式下已经行驶了120多万英里,软件已经知道了许多如何去应对不同情况的方法。下图就是谷歌自动驾驶汽车眼中的世界。
从图中可以看出车身的各种传感器可以检测到最远达两个足球场那样范围内的物体,包括人员,车辆,建筑区,鸟类,自行车等,这辆车可以看到其他的车辆,这些车辆在图里用紫色的图形来表示,骑自行车的人会用红色标出,左上角转角的地方会用橙色的圆锥来表示。它甚至可以识别交警的手势,这是非常了不起的,也是谷歌强大的软件算法能力的体现。虽然谷歌的自动驾驶汽车可以根据收集到的数据来预测很多事情,比国内的强大许多倍,但是仍然会出现以前从来没有发生过的情况。有一次,一辆测试中的自动驾驶汽车正行驶在山景城地带,出现了一个坐着电动轮椅的女人在路上转圈圈地追赶一只鸭子,但是这辆车却只能不断试探并且降速来躲避这个女人。
特斯拉强大在别人还在研究试验的时候,它已经量产并大规模投入使用了。
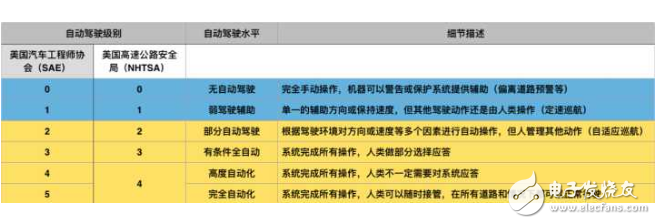
作为纯电动,特斯拉在自动驾驶方便本来就具有优势,同时特斯拉又特别执着于自动驾驶技术。目前跑在路上的特斯拉车型,实现 Autopilot 辅助驾驶使用了围绕在车身周围的 12 个超声波传感器识别周围环境、一个前置摄像头辨别前方物体、一个前置雷达也对前方物体进行识别,还有就是长时间路试积累来的高精度卫星地图。这样实现了下表中的“部分自动驾驶”功能。
而特斯拉在今年10月20日非常激动的宣布:从今天开始,所有在工厂生产的特斯拉车型 -- 包括Model 3--- 将配备具有全自动驾驶功能的硬件,相比人工驾驶,新硬件将从根本上提高车辆行驶的安全性。该系统将包含8个摄像头,覆盖360度可视范围,对周围环境的监控距离最远可达 250 米。除此之外,车辆配备的12 个超声波传感器完善了视觉系统,探测和传感硬、软物体的距离接近上一代系统的两倍。增强版前置雷达通过冗余波长提供周围更丰富的数据,雷达波可以穿越大雨、雾、灰尘,甚至前方车辆。为了更好的使用这些数据,车辆搭载了比上一代运算能力快40倍的处理器,运行特斯拉基于深度神经网络研发的视觉系统、声纳与雷达系统软件。综上所述,该系统提供了一幅驾驶员用眼睛无法触及的世界影像,通过波段同步检测车辆周边每一个方向,这一切远远超越了人类的感官。
特斯拉把传感器布满了全车。8 个摄像头提供 360 度的视觉监控,最远能够监控 250 米范围内的物体,12 个超声波传感器覆盖的范围是之前 Autopilot 系统的两倍。一个加强版雷达用来在雨雪大雾天气下探测前方车辆。这些硬件使特斯拉的自动驾驶可以达到“高度自动化”的程度。
另外,特斯拉路上跑的车型,都用自己的各种传感器为特斯拉的高精度卫星地图在做贡献,这一点是谷歌也比不上的,毕竟谷歌就那么几辆测试车跑来跑去,而特斯拉量产的车型都一定程度上是测试车。目前特斯拉 Autopilot 辅助驾驶的行驶里程已经达到了 2.22 亿英里(约合 3.57 亿公里)。
所以总体来看,不论是谷歌还是特斯拉,其自动驾驶技术都要比国内先进,国内要追上,还需要时日。
有时候,差距就是,看着很小,觉得一使劲就可以追上,然后就使劲,可刚要追上的时候,目标也加速了,差距反而更大了。
-
介绍无人驾驶硬件平台设计2021-09-09 2713
-
无人驾驶汽车的工作原理是什么?2021-06-28 5554
-
无人驾驶分级及关键技术2021-01-21 3129
-
无人驾驶汽车的关键技术是什么?2020-03-18 4715
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 6768
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 6788
-
无人驾驶与自动驾驶的差别性2017-09-28 6403
-
无人驾驶电子与安全2017-02-22 4703
-
【话题】无人驾驶汽车,真的要来了么?2016-06-24 9948
-
中国无人驾驶汽车市场将具有更大优势2016-06-13 3311
-
谷歌欲在英国首推无人驾驶汽车2015-12-14 3018
-
百度无人驾驶车北京完成路测2015-12-12 2677
-
无人驾驶导航平台2014-11-11 9483
全部0条评论

快来发表一下你的评论吧 !
