

安信可Ai-WB2+舵机控制(SG90)
描述
以下作品由安信可社区用户
King6688制作
01、SG90舵机介绍
首先介绍说一下什么是舵机。舵机是一种位置(角度)伺服的驱动器。适用于一些需要角度不断变化的,可以保持的控制系统。SG90就是舵机的一种。
舵机内部有一个基准电压,单片机产生的PWM信号通过信号线进入舵机,与舵机内部的基准电压作比较,获得电压差输出。电压差的正负输出到电机驱动芯片上,从而决定正反转。开始旋转的时候,舵机内部通过级联减速齿轮带动电位器旋转,使得电压差为零,电机停止转动。
SG90舵机的工作电压一般为4.8V~ 6V,通常使用5V供电,最大扭矩为1.6kg/cm。控制信号采用50Hz PWM脉冲。分为180度版本和360度版本,外观上看180度的内部带挡板,360度的则没有。其有三个引脚,分别是红线(VCC),棕线(GND)和橙线(信号线)。

SG90舵机的注意事项:
使用SG90舵机时需要注意以下事项:
1. 确保使用的电源符合舵机的工作电压要求。
2. 确保舵机的接线正确,避免接反或短路等情况。
3. 在使用过程中,避免超过舵机的工作角度范围,以免损坏舵机。
4. 在使用过程中,避免过度负载,以免损坏舵机。
5. 在使用过程中,避免过度震动,以免影响舵机的正常工作。
02、移植过程
PWM驱动规则
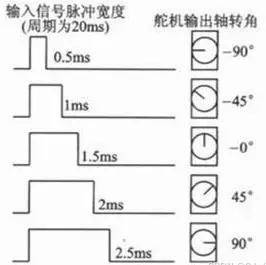
SG90舵机采用50Hz的PWM波驱动,需要的PWM高电平在0.5ms~2.5ms之间,脉冲宽度为20ms:
180度和360度的区别:
180度的舵机可以控制角度
360度的舵机只能控制正反转和速度
驱动逻辑
180度:
t = 0.5ms————转动 0 °
t = 1.0ms————转动 45°
t = 1.5ms————转动 90°
t = 2.0ms————转动 135°
t = 2.5ms————转动180°
360度:
t = 0.5ms————正转最大转速
t = 1.5ms————不转
t = 2.5ms————反转最大转速
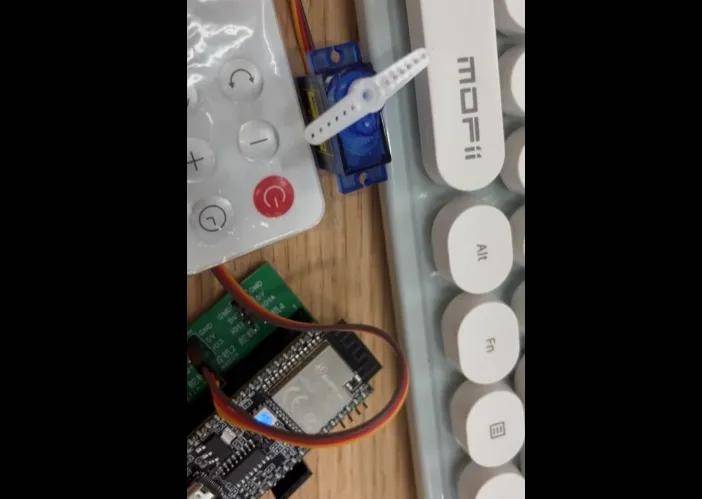
03、接线

04、算法简介
PWM 频率 = WB2的BCLK频率80MHz ÷ 分频Divider ÷ 周期Period ,即:80000000 ÷ 80 ÷ 20000 = 50Hz
// 根据图上的时间,计算出对应的threshold
/** 占空比,占空比是指高电平在一个周期之内所占的时间比率:
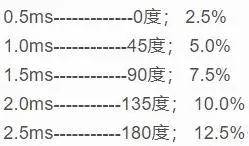
* 转动0度(-90度)需要的占空比为: 0.5/20 = 2.5%
* 转动45度(-45度)需要的占空比为: 1.0/20 = 5%
* 转动90度(-0度)需要的占空比为: 1.5/20 = 7.5%
* 转动135度(45度)需要的占空比为:2.0/20 = 10%
* 转动180度(90度)需要的占空比为:2.5/20 = 12.5%
* Period为20000时,带入以上公式,得出对应的高电平时间分别为:
* 20000 * 0.025 = 500
* 20000 * 0.05 = 1000
* 20000 * 0.075 = 1500
* 20000 * 0.1 = 2000
* 20000 * 0.125 = 2500
05、关键代码
PWM_Smart_Configure2(PWM_IO4, 80, 20000, 500); PWM_Channel_Enable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000)); PWM_Channel_Disable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000)); PWM_Smart_Configure2(PWM_IO4, 80, 20000, 1000); PWM_Channel_Enable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000)); PWM_Channel_Disable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000)); PWM_Smart_Configure2(PWM_IO4, 80, 20000, 1500); PWM_Channel_Enable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000)); PWM_Channel_Disable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000)); PWM_Smart_Configure2(PWM_IO4, 80, 20000, 2000); PWM_Channel_Enable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000)); PWM_Channel_Disable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000)); PWM_Smart_Configure2(PWM_IO4, 80, 20000, 2500); PWM_Channel_Enable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000)); PWM_Channel_Disable(PWM_IO4); vTaskDelay(pdMS_TO_TICKS(2000));
06、效果视频
(用的IO3,凑合看吧~~)
【Ai-WB2-32S驱动SG90舵机-哔哩哔哩】 https://b23.tv/5VUodni
审核编辑 黄宇
-
pwm控制SG90舵机资料分享2022-07-10 1527
-
STM32驱动SG90舵机的方法2022-02-21 1784
-
如何使用stm32Cubemx软件配置PWM来控制SG90舵机角度2022-01-21 1398
-
SG90舵机+超声波简介2022-01-05 2005
-
STM32驱动SG90舵机2021-12-24 4140
-
如何利用STM32F103控制SG90舵机?2021-12-14 2076
-
请问51单片机如何控制SG90舵机?2021-11-08 1761
-
51单片机如何控制SG90舵机?2021-10-26 3650
-
控制舵机SG90的教程2021-08-10 3632
-
如何利用51单片机去控制SG90舵机?2021-07-29 1957
-
微雪电子SG90舵机简介2019-12-30 33277
-
舵机SG902017-08-07 4257
-
51控制SG90舵机的电源问题2017-04-14 7631
全部0条评论

快来发表一下你的评论吧 !
