

基于ARM9嵌入式的RS485总线接口设计,自动控制IO口实现通信方向控制
描述
随着ARM处理器应用的范围的不断深入,根据需求的不同ARM提供的外设也越来越丰富,常用的通信接口有RS232、RS485、CAN、以太网等。RS485总线凭其传输距离远、抗干扰能力强、价格低廉等优点在各种工业场合得到广泛的应用。设计使用ARM9处理器S3C2440内部集成的UART外设和RSM485模块构建具有电源隔离、电气隔离、总线保护的RS485总线接口,通过对嵌入式Linux系统RS232驱动程序的修改,使的在通过该修改后的串口驱动程序发送数据时,自动控制IO来实现RS485通信的方向控制,从而简化了RS485通信的控制流程,Linux下RS485通信程序通过对该串口的读写,实现与RS485总线上的其他设备通信。
1.通信接口的硬件设计
S3C2440处理器片内集成了丰富的外设资源,可以方便的实现嵌入式应用中的各种接口通信。设计中用到了Samsung-ARM9-S3C2440,其片内集成的3个UART,在设计中UART0用于嵌入式Linux操作系统的控制台(console)接口,UART1作为RS232接口与其他RS232接口设备通信,UART3用作RS485的数据通信接口。由于ARM9处理器的IO电平与RS485的电气标准不同,RS485采用差分信号负逻辑,+2~+6V表示“0”,-6~-2V表示“1”。为了达到RS485总线的电气特性标准,所以必须要外接电平转换芯片[1,3-5],同时考虑工业应用环境恶劣等因素,需要考虑RS485总线的电源隔离、电气隔离、总线保护等因素,设计中用到广州周立功的RSM485模块。
RSM485隔离收发器模块,是集成电源隔离、电气隔离、RS485接口芯片,总线保护器件于一身。该模块采用灌封工艺,具有很好的隔离特性,隔离电压高达2500VDC,最多支持400个节点,最高通信波特率115200。
图1为系统中利用S3C2440中的UART2实现半双工的RS485总线的原理图,在同一时刻里数据只能往一个方向传输。其中的引脚CON为接收、发送控制脚,现在将其与S3C2440的IO引脚相连,由该引脚的电平控制芯片数据的方向。要发送数据时将其置0,接收数据时将其置1。
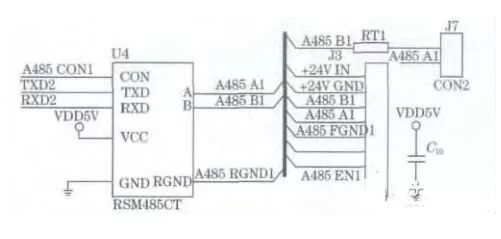
图1S3C2440-485接口
2.软件设计
2.1RS485通信设计
图2中首先打开驱动部分针对RS485通信修改过的串口2,设置其串口参数,此时串口2处于RS485总线接收模式,然后向总线上第一个设备节点发送数据读取指令,完成select函数调用图1S3C2440-485接口初始化后,select函数根据用户设定的超时时间,等待设备返回数据,若select函数返回异常,则重新进行初始化,若在设定时间内,未接受到从设备的数据,select函数返回超时,则重设下一从设备节点等待超时时间,并发送下一设备数据读取指令,重新进入select等待设备返回数据;若在设定时间内,接到从设备返回数据,则从串口接收缓冲读取数据,并完成用户协议数据解析,完成一次主从设备的数据通信,然后轮询到下一设备。
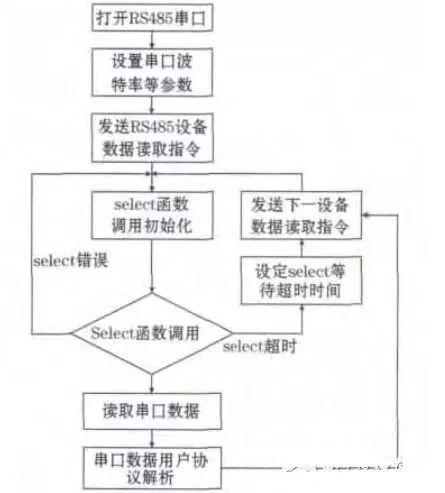
图2RS485通信软件流程
2.2RS485驱动设计
设计中使用ARM9处理器S3C2440内部集成的UART外设和RSM485模块构建而成,其驱动程序与RS232驱动程序相比多了一个通信方向控制引脚的控制,所以在Linux操作系统中,完全可以借助内核的串口驱动添加方向控制IO相关代码即可实现[4,6,7]。在linux2.6.32内核源码中,串口驱动相关代码在文件linux-2.6.32.2/drivers/seria/samsung.c中,为了实现RS485的通信,修改部分主要包括3个部分:
(1)在串口驱动的初始化代码中加入RS485通信方向控制IO口设备的初始化工作,关键代码片段为:
if(port-》line==2){//如果初始化的是串口2
s3c2410_gpio_cfgpin(S3C2410_GPH0,S3C2410_GPH0_OUTP);//将GPG2,设为输出功能
s3c2410_gpio_setpin(S3C2410_GPH0,0);//设为高电平,使串口启动时处于接收数据状态。
RS485方向控制IO口初始化使用到了2个内核函数(在arch/arm/plat-s3c24xx/gpio.c),其函数原型为:
voids3c2410_gpio_cfgpin(unsignedintpin,unsignedintfunc-TIon)
此函数的功能是设置引脚的功能,参数pin是要设置的引脚,对应着是GPH0也即是S3C2410_GPH0引脚,参数funcTIon是要设置引脚的功能,设置中用到的是输出功能,所以该值是S3C2410_GPH0_OUTP.
voids3c2410_gpio_setpin(unsignedintpin,unsignedintx)
此函数的功能是设置引脚的输出值,参数pin是要设置的引脚,参数x是要设置引脚的输出值0或者1.
(2)在串口数据开始发送前,将方向控制IO置0,使的RSM485处于发送状态,关键代码片段如下:
if(port-》line==2){s3c2410_gpio_setpin(S3C2410_GPH0,1);//设为低电平,使串口启动时处于接收数据状态。
udelay(30);//等待方向IO控制脚状态稳定}
在设置方向控制IO口状态后,加入一定延时,等待方向IO控制脚状态稳定,避免出现由于方向控制状态不稳定导致发送数据出错。
(3)在串口数据发送完成后,自动进入到数据接收模式,关键代码片段为:
if(port-》line==2){
while(!(rd_regl(port,S3C2410_UTRSTAT)&0x04));//等待串口发送完成,这句千万不能少
s3c2410_gpio_setpin(S3C2410_GPH0,0);}
由于S3C2440处理器自带串口带有硬件缓冲区,串口驱动中,数据发送完成是指数据已有驱动程序全部写入到发送缓冲中,但此时串口数据并为正在发送出去,所以必须等待数据完全发送完成后,再将方向控制IO口置1。
2.3Linux下RS485通信编程
RS485驱动程序修改完成后,可以像操作串口一样操作RS485接口。在嵌入式Linux系统下,串口的设备文件位于/dev目录下,可以使用文件打开、读写函数[2,8,9]直接操作RS485设备。设备打开和读写部分关键代码片段为:
intfd=open(Dev,O_RDWR|O_NOCTTY);//打开设备……
nread=read(fd,s1_buf,64);//读取设备数据……
write(fd,send_buff,6);//写入发送数据
在设计中,ARM9作为RS485通信的主控设备与个从设备进行通信,主控设备从每个从设备读取数据时,主设备先向该设备发送数据读取命令,然后设备等待从设备返回数据。所以在实际应用中,因合理设置等待从设备返回数据的等待时间。在设计中使用select函数来实现等待延时,关键代码为:
switch(select(max_fd,&fds,NULL,NULL,&TImeout))//select使用
{case-1:break;//select错误,退出程序
case0:Find_endp(&pth_endp_line1);
send_buff[1]=pth_endp_line1.index+1;
send_buff[4]=send_buff[1]+1;
write(fd1,send_buff,6);
TImeout.tv_sec=time1;
timeout.tv_usec=time2;break;//超时,再次轮询
default:if(FD_ISSET(fd1,&fds))//串口1数据
{nread=read(fd1,s1_buf,64);
if(nread》=20)
{i2c_led_set(8,1);
Value_t=myrount(Value_t,100);
Value_h=myrount(Value_h,100);
Value_p=myrount(Value_p,100);
Value_pt=myrount(Value_pt,100);
}}}//endswitch
3实验结果及应用
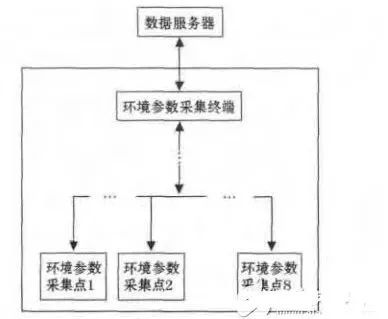
图3RS485接口应用
设计成功应用到环境参数采集系统中,系统中主要有采集节点、采集终端、数据服务器组成,如图3所示。采集节点负责完成气压、温度、湿度参数的采集;采集终端通过RS485总线从分个采集节点读取采集数据,并通过以太网将采集数据上报到数据服务器;数据服务器完成数据的存储,并为其他形式的应用提供应用接口。在设计中主设备循环轮询RS485总线上所有设备,每间隔1s主控设备ARM发送1次数据读取指令,读取指令中包含了从设备识别码,符合识别码的从设备立即返回采集数据。如果数据出错主设备将丢弃该数据包,等待下一次轮询,所以在通信程序设计时未考虑数据包错误重发机制。设计达到预期目标。尽管偶尔有误码出现,但设计中避免了涉及linux内核复杂代码的的修改,仍不失为有实用价值的设计方法。
-
嵌入式系统应用中实现RS485的方向切换2015-08-02 4083
-
基于ARM9的嵌入式PLC系统的设计与实现2021-07-30 1943
-
ARM9微控制器与嵌入式无线网络实战2011-03-04 2173
-
基于ARM9的测控系统通信接口设计方法和过程2019-06-05 1791
-
嵌入式系统应用中如何实现RS485的方向切换?2021-05-24 2078
-
基于嵌入式Linux的RS485通信协议2009-04-22 702
-
基于ARM9的嵌入式控制系统设计与实现2009-08-13 554
-
基于ARM9的悬浮转子的自动控制系统2009-12-16 520
-
ARM9嵌入式技术及Linux实验指导2010-02-09 1064
-
RS485总线接口电路2009-05-13 4117
-
基于CAN总线与RS485的DSP通信接口设计2010-02-08 3623
-
嵌入式ARM9的USB设计与实现2010-05-11 1871
-
分布式控制系统的主从式RS485多机通信2011-11-04 1918
-
基于ARM9与LINUX的RS485总线的通信接口设计2017-12-07 12076
-
基于ARM9的嵌入式SIP电话终端的设计与实现2023-10-13 692
全部0条评论

快来发表一下你的评论吧 !
