

设计仿真 | 基于VTD的智能大灯仿真测试方案
描述
随着汽车行业智能化的发展,车灯系统从基础的功能化照明发展为智能化的视觉交互系统。从2020年开始,车灯开始向智能化、像素化、激光化、感知、决策、规划、控制、交互体验等方向发展。例如,智能车灯在基础照明的基础上,会根据车辆的环境状态对投射灯光进行自动调整,避免影响周围行人/车辆的正常交通行为;狭窄道路通行状态下,智能大灯支持地面投射示宽灯,从而向驾驶员提供高可靠性保障;恶劣天气形势,智能车灯可以投射天气标识,增强行车安全性。智能车灯的开发和测试,亟需高效安全的测试方法。以虚拟场景为基础的仿真测试为智能大灯的开发和测试提供了有效解决方案。
以场景仿真工具VTD为基础,构建面向智能灯光的SIL/HIL解决方案。方案的整体流程如下:
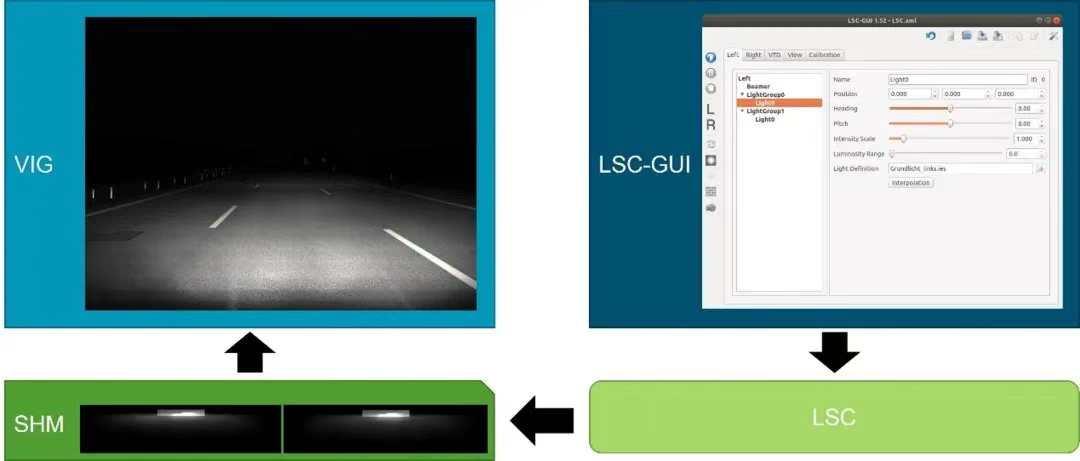
通过VTD构建多种测试场景,并通过LSC工具完成车辆大灯的分布和控制设置,以及光强传感器模型;
被测对象通过软件或硬件的方式集成到测试系统中;
VTD的摄像头传感器模型采集虚拟场景的图像信息,转发至智能大灯接口以接收画面,软件根据画面做出决策输出灯光效果,向VTD端发送;
VTD接收到控制器的输出灯管,投射到VTD的实时场景渲染图像中;其中,被控车辆由驾驶员模型和车辆动力学软件联合仿真输出;
VTD生成的新的图像再次发送至控制中枢的算法接口,完成中枢控制系统的闭环测试;
整个测试环境的各个节点通过自动化测试软件管理,从而完成自动化测试,自动生成测试报告。
基于VTD的智能大灯仿真测试具有多项优势:
01 高效快速测试验证,且测试受限因素少;
02 测试场景多样化,提高了测试广度、深度和覆盖度;
03 多LED灯组独立控制位置、亮度与色温,支持工业对标;
04 多Beamer融合投影,支持时变素材;
05 支持导入ies文件对LED光分布进行设置;
06 自定义光源设置与多物理光源仿真;
07 配置参数多元化,支持二次开发。
*本文源自海克斯康
-
5月22日技术直播分享 | 智能底盘电控产品仿真测试解决方案2025-05-20 400
-
智能座舱HIL仿真测试解决方案2024-12-24 1444
-
智能驾驶HIL仿真测试解决方案2024-12-23 1633
-
12月19日在线研讨会 智能座舱仿真测试解决方案2024-12-17 903
-
设计仿真 | 基于VTD的V2X仿真应用2024-10-14 2277
-
设计仿真 基于VTD的AR-HUD仿真测试解决方案2024-10-09 2041
-
智能网联汽车虚拟仿真测试平台2023-11-20 3814
-
自动驾驶仿真:Carsim、NI和VTD联合仿真2023-06-06 1554
-
自动驾驶仿真工具2023-06-01 723
-
智能座舱仿真测试解决方案2021-12-14 1626
-
基于数字孪生的智能车间系统仿真加速测试2021-06-29 1033
-
卫星通讯的通道仿真和测试解决方案2010-03-05 1100
全部0条评论

快来发表一下你的评论吧 !
