

一文解析特斯拉无人驾驶技术原理(最全解析)
智能驾驶
描述
美国当地时间10月19日,Tesla发布声明称,包括还未上市的Model 3在内,目前工厂在产的特斯拉汽车都将全部配备能够实现完全自动驾驶(full self-driving capability)的硬件。其中,包括8个车身周围的摄像头,12个最新的超声波传感器,1个增强版前向毫米波雷达以及处理能力将比上一代高40倍的车载计算设备NVIDIA’s Drive PX 2,其作用及安装位置如表1与图1所示。特斯拉想借此实现以下公司愿景:
为所有人提供比人类驾驶更高的行车安全;
为车主提供更低的交通成本;
为无车之人提供低价、按需的出行服务。
无人驾驶技术的几大层面

按照美国高速公路安全管理局(NHTSA)的分级,自动驾驶系统可以分为五个不同的等级:
第零级:车辆完全没有任何的自动驾驶,驾驶员对车辆完全掌控;
第一级:车辆具备至少一种基本的电子辅助系统;
第二级:车辆具备至少两种电子辅助系统,能够帮助驾驶员减轻驾驶工作;
第三级:车辆具备足够信赖的自动驾驶能力,但关键时刻驾驶员仍然对车辆具有操控权;
第四级:驾驶员对车辆不具有操控权力,仅需输入目的地或导航资料便能完成整个旅程。
目前,主流水平的无人驾驶处在第二与第三阶段之间,而特斯拉的无人驾驶技术则处在第三阶段,因为特斯拉并未达到第四阶段所说的车辆可以监控安全相关的驾驶功能。
特斯拉的无人驾驶原理
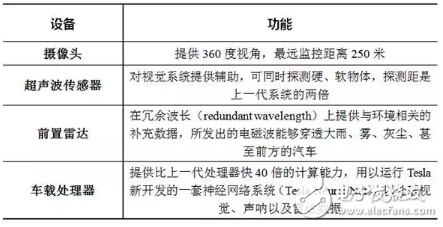
表1 Tesla所配硬件及其功能
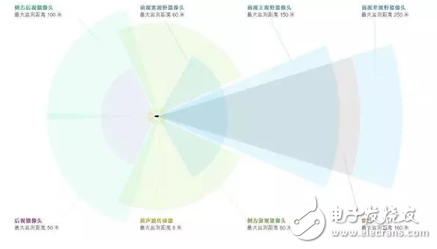
图1 Tesla所配硬件的安装位置
在Tesla创始人Elon Musk的看来,“每年交通事故造成全球死亡人数高达120万,其中美国人有3万多人。汽车实现全自动驾驶的基础已经具备,且其安全性至少是人类驾驶员的2倍以上,既然如此为什么不加速这个进程呢?”从理论上讲,这是有道理的,因为汽车上安装的传感器能够不知疲倦地实时捕捉汽车周围人类无法察觉到的大量信息,由车载计算设备及时处理后以人类无法触及的速度做出反应。但事实上,由于今年5月美国佛罗里达州的一位Tesla车主在使用Autopilot时发生车祸不幸生亡,普通民众对Tesla Autopilot系统并不十分信任。
一路既往地,Tesla全自动驾驶的这条新闻一经发布,便在全世界范围内引起热议。在Tesla的拥趸看来,Elon Musk是精明而有远见的企业家,而在批评家及竞争对手(主要是传统车企)眼中,Musk的部分决策过于冒险甚至有些胆大妄为(reckless):Elon Musk给自己设置的研制能够从洛杉矶自动行驶到纽约的无人驾驶汽车的最终期限是2017年年底之前,而福特、通用与Google都是2021年,百度则为2019年,由此可见Musk的雄心和激进。
如今该新闻已经过去近10多天,喧嚣已经过去大半。如果再仔细分析一下Tesla官方发布的文件及权威媒体的报道,我们就会发现其实Elon Musk所做出的每一个决策,其背后都是有科学依据和理性思考作为支撑的,而且正好都体现了硅谷IT企业所具有的典型思维方式和硅谷企业家改变世界的情怀。
Tesla硬件配置中为什么没有采用激光雷达?
在硅谷有一个明确的做事原则,即要最大限度地采用便宜的资源,尽可能节省宝贵的资源,该做法最初是受由香农第一定律引出的霍夫曼编码(即)的启发得来的,在经济学上被称为“吉尔德定律”(Gilder’s Law)。例如,由于摩尔定律的作用,集成电路芯片上所集成的晶体管的数目每隔18个月翻一倍(如图2所示),反过来看便是相同性能微处理器的成本每隔18个月降一半,这是一种较便宜的资源。因此,类似于Google和Facebook这样的IT巨头必然将越来越多原本由工程师这种较昂贵的资源来完成的工作交给计算机来完成,以降低总的办公成本。
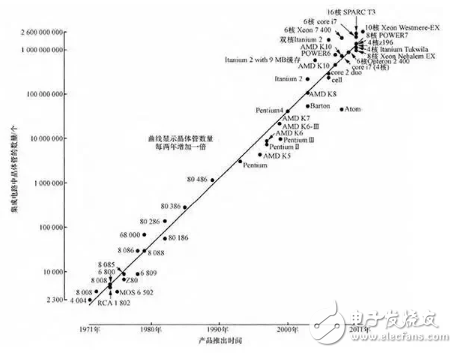
图2 微处理器中晶体管数量变化与摩尔定律
具体到Tesla全自动驾驶系统采用“摄像头+40倍计算能力”的方案而不是像Google、Uber那样使用激光雷达(Light Detection And Ranging,LiDAR)而言,亦可用“吉尔德定律”来解释。如图3所示,在摩尔定律的作用下,计算能力的成本随时间以较陡的曲线下降,而机械旋转式激光雷达和机械制造部件的成本对时间并不敏感,几乎只能由于大规模生产所产生的规模效应而降低。
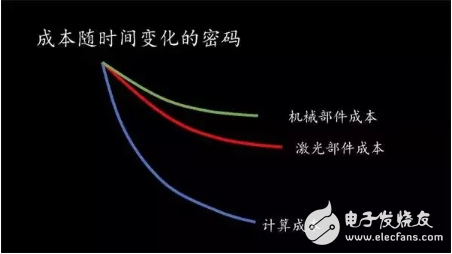
图3 无人驾驶汽车各部件的成本随时间的变化(取自驭势科技)
由于Tesla的汽车已经量产,成本的控制对销量的提升便是至关重要的。相对应地,Google与Uber的无人驾驶汽车目前还只是处于测试阶段,几百辆的规模即便全部配置8万美元的激光雷达也花不了多少钱。所以,Tesla “低成本感知+高性能计算”的选择是对于Tesla短期控制整车成本是十分合理的。
虽然Elon Musk在多个场合表示:“I‘m not a big fan of LiDAR, and I don’t think it makes sense in this context.(我不是激光雷达的支持者,我并不认为它对于无人驾驶汽车是绝对必要的)”,但考虑到当年比尔-盖茨在微软的DOS系统与苹果公司的“视窗+鼠标”系统竞争时也表达过类似的态度却在背地里偷偷地研发Windows 3.0系统的行为,我们可以将Musk的话理解为对媒体和用户的洗脑,用自己的个人威信给Tesla解决方案的安全性背书,目的是为激光雷达价格地下降争取时间,因为包括Velodyne和Quanergy等公司成熟的固态激光雷达产品正在研制中,据这两家公司的公开信息,其成本可降低到250美元以下。
但是,激光雷达对于保证无人驾驶汽车99.9999%+的行车安全依然是十分必要的,按照普林斯顿大学肖建雄博士的说法:“我非常怀疑,Tesla有一种不使用激光雷达的安全解决方案,激光雷达是唯一一种能实现100%安全的解决方案。”所以,我们有理由相信,等到固态激光雷达的成本降低到100~200美元,Elon Musk的态度会来一个180度大转变,在Tesla的无人驾驶汽车上配置激光雷达。据网友在Twitter上曝光的、在加州道路上拍摄到的车顶装有激光雷达Tesla正在道路上测试的照片,由此可以一窥Musk的真实想法。
另外,值得一提的时,在PC时代有所谓的基于“安迪-比尔定律”构成的Win-Tel体系,用以概括PC时代“比尔-盖茨的Windows操作系统与各软件厂商一起升级软件,致使Intel CEO安迪-格鲁夫生产的上一代处理器性能不够用,逼迫用户购买配置了新一代Intel处理器的计算机”的现象。类似地,智能手机时代有类似的“谷歌安卓系统-高通手机芯片”构成的Android-Qualcomm体系。汽车工业目前并没有类似的规律作支撑,但考虑到汽车的平均使用寿命一般为10年左右,是PC与智能手机的5倍,所以,Tesla选择比上一代性能强大40倍(2^5=32)的车载计算设备,似乎在预示着Elon Musk有意缔造无人驾驶汽车时代的Tesla-NVIDIA体系?
Tesla为什么采用OTA的方法升级软件?
在不久前举行2016中国汽车工程学会年会(SAECCE 2016)的分会讨论中,地平线机器人科技创始人余凯博士提到,“Tesla先把硬件系统装上去,然后逐步升级软件的做法,已经在上一代Autopilot中实践过了【注:如图4所示,特斯拉定期通过无线网络更新其汽车软件,以提高性能和修复安全漏洞。多年来,它一直在使用这些所谓的无线软件更新(Over-The-Air Software Update,OTA)。之前这种巧妙的设计能使特斯拉即使在汽车出厂之后依然能够依据反馈到云端的数据,即时做出反应,不断提升性能和用户体验】。但是,这种做法对于传统车企来说,依然是不可想象的。”与余凯博士持类似观点,Fortune杂志也评论道:“Loading cars with hardware that might not be used for years—and requires a software download to unlock the features—is unprecedented in the industry.(在汽车上预先搭载可能多年都不会使用的硬件,并且需要通过更新软件来解锁新功能,这在汽车行业是前所未有的)。”

图4 Tesla OTA升级历史(取自汽车之家)
正如上汽集团总工程师程惊雷在SAECCE 2016评价车企与IT企业的不同之处时说到的,“汽车企业都是牛顿的学生,而IT企业都是香农的学生”,传统车企的做法的科学基础是由起始于17世纪的牛顿力学经过300多年演化而来的“机械思维”。基于机械思维的一切决策都是以确定性或还原论为前提的,具体的做法是要做到算无遗策,所有可能的情形都要提前预料到并做好应对措施,争取一次做成功,如果一个环节没有想到,后果就是灾难性的。最典型的例子便是基于泰勒科学管理的流水线生产模式,20世纪初,亨利-福特便是用此大批量制造生产汽车的:
首先将复杂的产品分解成简单的部分,分别加以设计与制造,即2=1+1;
一个过程的结果是可预测的,在生产线的起点放入相应的零件,经过这个流水线的组装,一定可以得到所想要的产品,即1+1=2;
上述过程,类似于将初始参数带入牛顿力学方程后,一定可以计算出物体的运动轨迹,一切都是确定的、可还原分解的。
但是随着科学的发展,科学家们发现,这个世界并不是确定的。不论是有法国数学家庞加莱(Henri Poincaré)在三体问题、美国气象学家洛伦兹(Edward Lorenz)在天气预报等宏观世界中发现的混沌现象,还是有物理学家海森堡(Werner Heisenberg)在微观世界中发现的测不准原理,都表明:这个世界在大部分情况下是不可预测的(即1+1≠2)。
基于这个世界是不确定的前提,在第二次世界大战中,美国数学家维纳(Norbert Wiener)和香农(Claude Shannon)各自逐步发明了一套新的方法论,即控制论和信息论。而直到第二次世界大战结束才真正开始发展的硅谷和以色列则跳过了指导了前两次工业革命的牛顿力学和机械思维,直接接受了这套新的方法论,避免了历史包袱,从而成为了全世界IT创新创业最活跃的地区。
香农的信息论,可以简单地理解为利用信息消除不确定性(即信息熵),现在提的比较多的“大数据思维”本质上是香农的信息论。而维纳的控制论,可以简单地理解为根据反馈不断进行调整输出,而放弃对未来做过多的预测,因为随机性无处不在。在Google内部,产品经理们都遵循这样一个规则:在没有数据之前,不要给出任何结论。这正好体现了信息论与控制论的思维方式。吴军博士在《智能时代》中提到:“人类在机器智能领域的成就,其实就是不断地把各种智能问题转化成消除不确定性的问题,然后再找到能够消除相应不确定性的信息,如此而已。”不论是Google在线广告与用户的高度匹配,还是Nate Siliver准确预测出2012年美国大选所有50个州及华盛顿特区的结果,皆是如此。
具体到无人驾驶汽车而言,最先研制出的Google的做法也体现了“利用信息消除不确定性”并在此基础上“根据反馈不断进行调整输出”的原则——Google无人车是Google街景项目的延伸,只能在街景车扫过的、具有大量数据积累的地方行驶,Google工程师根据测试的结果离线调整程序。而当Google的无人驾驶大数据具有了完备性,即覆盖了所有可能的情况时,不确定性就被完全消除了,无人驾驶汽车就实现了100%的安全。但事实上,这对Google而言比较困难,因为其在测的无人车数量比较少,只有几百台。据华尔街日报美国当地时间10月5日报道,Google宣布自己的无人驾驶汽车刚刚完成200万英里道路行驶里程。从2010年纽约时报曝光Google无人车算起,时间经过了6年。而由于搭载Tesla Autopilot的汽车数量大了两个量级,Elon Musk几天后在个人Twitter上宣布:Tesla Autopilot发布后的1年中累计行驶里程已达到2.22亿英里。因此,Tesla更有机会先达到大数据的完备性。
当然,实现大数据完备性不可能是一蹴而就的。如果汽车工况也如自然界和社会中的许多现象一样,遵循帕累托分布(即幂律),则图4中绿色部分表示的经常发生的少数工况占所有工况发生次数的绝对比重(如80%以上),而不经常发生的大量工况则分布在图中黄色的长尾中。但由于汽车保有量的基础达到亿辆级别,长尾中的小概率工况乘以10^9后,发生的次数也是惊人的。而要覆盖长尾中的小概率工况,需要积累比80%经常发生的工况多得多的行驶里程,比如后者需要积累100万公里,前者可能需要积累100亿公里里程,相似的例子可以在搜索引擎中找到。细心的用户可能会发现,对于常见的关键词搜索,比如“人工智能”,Google和微软Bing搜索的结果差不多,但是遇到偏僻的关键词,如“伦勃朗早期作品”,由于Google长期积累的数据足够训练出这些“长尾搜索”的点击模型,它的结果要比Bing要准确的多。
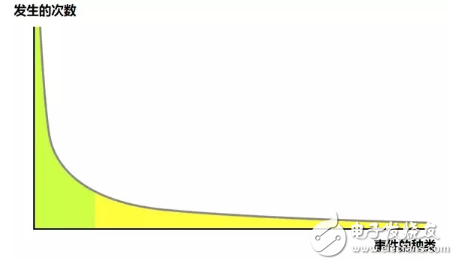
图5 帕累托分布
Tesla作为一家诞生于硅谷并自诩为“IT公司”的汽车企业,自然深谙上述道理——产品在达到一定水准后,只有通过先上线,得到反馈,然后再修改,才能完善,那种一次性设计开发一个完美的产品的做法,在未知因素过多的情况下,几乎不可能做到。其OTA(Over-The-Air)升级软件系统的做法,即Tesla官方文件中声称的“Before activating the features enabled by the new hardware, we will further calibrate the system using millions of miles of real-world driving to ensure significant improvements to safety and convenience.(在启用由新硬件激活的新功能之前,我们将使用数百万英里的真实驾驶里程进一步校准系统,以确保显著提高安全性和便利性)”,体现了“利用信息消除不确定性”及“根据反馈不断调整输出”的思维方式:Tesla会针对出现的小概率新工况,做出相应的反应,及时制定应对措施,这完全不同于传统车企的做法。
通常情况下,车企试图在研发阶段就提前预测到一切可能的情形,然后在开发的过程中予以解决。对传统车企而言,在汽车离开流水线的一刹那,两者之间的联系就被切断了,车企对于汽车的运行状况其实是一无所知的。汽车厂商对数据并不关注,并不会像通用电气那样认真地收集航空发动机每次飞行所产生的数据,将提炼出的宝贵信息用于下一代产品的开发。例如,在汽车出厂之后,根据每一个车主的不同驾驶习惯和形式工况的数据,汽车厂商能够做到修改标定过的内燃机MAP图以提升经济性或动力性吗?并不能!因为传统车企本质上是基于牛顿力学的,并不关注不确定性和个性化。
就研发无人驾驶汽车而言,传统车企那种想保证完全安全之后再发布新车的做法是行不通的,因为长尾中的小概率工况只有通过收集大量的数据,以OTA的方式才能逐步覆盖,正如Tesla所做的那样。值得一提的是,只要汽车的被动安全技术做到位,Tesla这种看似比较激进的做法并不会导致无法挽回的结果,但却可以实实在在地在整体上提升行车的安全性。
Tesla全自动驾驶系统的商业模式是什么?
无人驾驶汽车可算是一种新技术,而一种新技术想要对整个社会产生积极正面的影响,需要有相应的商业模式配合。就之前的汽车行业而言,传统车企的商业模式百年来基本没有大改,大致可以归纳为:由零部件厂商供应零部件给整车制造商,再由后者向销售网络中的经销商提供汽车产品,经销商从事卖车、维修等服务,再配以金融服务商提供如车贷、车险之类的汽车金融服务。
这从图6所示的传统车企与像Tesla这样的科技公司在资本性支出与企业人才的结构分布上就可见一斑。前者较注重硬件开发与制造这种对生产资料和金融资本要求很高但边际成本也很高的生产活动,这也符合第二次工业革命中诞生的企业的特点;后者更偏重软件开发这种对人力资本要求很高同时边际成本很低的研发工作,同样这也符合信息革命中诞生的企业的特点。由此造成的结果便是:汽车企业中毛利润率最高分丰田也不过15%,而硅谷的科技公司的毛利率普遍在60%~70%以上。

图6 汽车制造商与科技公司在资本性支出与企业人才的结构分布上的比较
或许是看出上述传统汽车工业的“阿基里斯之踵”,Elon Musk为Tesla无人驾驶汽车设计的商业模式,除了传统的汽车销售之外,还有交通出行服务提供商,即Tesla Network,而后者与Uber的主营业务是重叠的。在Tesla的官方文件中是这样表述的:
“…Please note also that using a self-driving Tesla for car sharing and ride hailing for friends and family is fine, but doing so for revenue purposes will only be permissible on the Tesla Network, details of which will be released next year.”【也请注意,使用无人驾驶Tesla进行汽车共享或为朋友和家人提供专车服务当然是可以的,但想借此盈利的话,将只被允许通过特斯拉网络(Tesla Network)来实现,其相关细节将在明年发布。】
如果关注一下行业内其它专业人士在公开场合表达过的观点,就会发现持有类似看法——对用户而言,重要的不是拥有汽车的产权,而是使用权;对企业而言,相比于直接拥有大量固定资产,在当下掌控事物之间的连接关系或许更易成功——并不只有Musk一人。
汽车租赁行业鼻祖Zipcar的创始人罗宾-蔡斯(Robin Chase)于8月10日在Medium上发文《Self-Driving Cars Will Improve Our Cities. If They Don’t Ruin Them》,指出汽车共享将给交通与就业带来巨变,政府应提前做好预案;
进入汽车共享领域比Uber更早的Lyft的联合创始人大卫-齐默(David Zimmer)于9月18日在Medium上发文《The Third Transportation Revolution》,描绘了无人驾驶汽车共享这种商业模式将带来的“正外部性”;
Google无人车之父塞巴斯蒂安-特龙(Sebastian Thrun)在10月29日的知乎Live中再次表达了“Transportation as a Service”(出行及服务)的观点,即按需使用出行服务但并不购买汽车。
McKinsey与Bloomberg New Energy Finance在10月初发布的《An Integrated Perspective on the Future of Mobility》报告中,也将共享无人驾驶汽车作为主要的交通方式之一,如图6所示。
图6 麦肯锡眼中的城市交通模式之一:无缝交通系统(Seamless Mobility)
如果Tesla Network真将得到有力执行,那么Tesla与Uber之间早晚会有一战,且双方的优势都来源于目前各自手中所掌握的大数据——Tesla拥有更多道路行驶里程数据,Uber拥有更多用户出行习惯数据——并正在或有意图把手升到对方的地盘中——Tesla有意开展汽车出行服务,而Uber正致力于开发Level 4以上的无人驾驶汽车——争夺出行网络中的枢纽节点的地位(如同Google之于互联网、Facebook之于社交网络),以此垄断万亿美元的出行市场,孰胜孰负远未明了。
-
无人驾驶导航平台2014-11-11 0
-
百度无人驾驶车北京完成路测2015-12-12 0
-
谷歌欲在英国首推无人驾驶汽车2015-12-14 0
-
【话题】无人驾驶汽车,真的要来了么?2016-06-24 0
-
福特CEO曾扬言无人驾驶将会在2020年实现商用,你们同意吗?2017-02-07 0
-
无人驾驶电子与安全2017-02-22 0
-
2017全球无人驾驶汽车展2017-02-22 0
-
无人驾驶与自动驾驶的差别性2017-09-28 0
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 0
-
无人驾驶汽车的关键技术是什么?2020-03-18 0
-
无人驾驶分级及关键技术2021-01-21 0
-
无人驾驶汽车的工作原理是什么?2021-06-28 0
-
介绍无人驾驶硬件平台设计2021-09-09 0
-
无人驾驶硬件系统主要包括哪些2021-09-09 0
-
特斯拉无人驾驶都有哪些功能_特斯拉怎么实现无人驾驶的?2018-01-05 19808
全部0条评论

快来发表一下你的评论吧 !
