

基于SDSoC平台配置一个新的项目指南
FPGA/ASIC技术
描述
作为地球上最具性价比的嵌入式视觉应用开发平台,Digilent Zybo-Z7 去年一经推出,就凭借华丽丽升级的Zynq器件与各种板载外设接口,俘获了众多Zynq爱好者的芳心。这还不算这一业界标杆性的入门级Zynq-7000平台还免费附赠SDSoC Vochuer!
这一赠可谓激起千层浪,对于垂涎SDSoC已久的Digilent社区用户而言,识货者此等福利当然不会错过。然,作为版主,在下也因此收到了不少关于SDSoC开发的问题。继上一篇我们聊了聊“如何在Zynq开发板上入门SDSoC开发工具”,为响应Digilent开源社区用户的需求,今天我们就再来一发「SDSoC勾搭OpenCV指南」,教你如何用Zybo-Z7创建一个基于OpenCV的SDSoC项目。
在开篇之前提醒一下:
1. 在本教程中,使用的SDSoC版本是2015.4。
2. OpenCV要求Linux易于使用,因为它会使用到许多库,例如pthread.。。本文中不会介绍任何裸机配置方面的内容。
1. 软硬件清单
● SDSoC
● Zybo Z7
● 包含Linux内核+根文件系统的平台
● 装有Linux系统的计算机
2. 获取OpenCV
这一步你至少可以有两个选择,一种是下载并交叉编译库( docs.opencv.org/2.4/doc/tutorials/introduction/crosscompilation/arm_crosscompile_with_cmake );第二种是获取一个已经交叉编译好的库。在这一教程中,我们事先已经在SDSoC安装文件夹中建立好了OpenCV 2.4.5版本。
3. 修改平台
这里我们需要将编译好的库添加到你想要用于项目的SDSoC平台的根文件系统中。在这步操作之后,可执行文件(你的应用程序)将能够加载库。 在Zybo Z7平台中使用的文件系统镜像类型是initramfs。如果你手头的是另一种镜像类型,你可以在Xilinx wiki上得到更多的所需信息:+and+Modify+a+Rootfs
3.1 将根文件系统复制到临时文件夹中
将位于平台的启动文件夹中名为“uramdisk.image.gz”的存档复制黏贴到一个临时文件夹中。打开终端,并进入该文件夹。
3.2 去掉U-BOOT头文件以获得CPIO存档
dd if=uramdisk.image.gz bs=64 skip=1 of=ramdisk.gz
3.3 将新的CPIO存档压缩到一个新创建的文件夹中
mkdir my_root
gunzip -c ramdisk.gz | sh -c ‘cd my_root/ && sudo cpio -i’
3.4 复制库与头文件(-P保存链接)
sudo cp -p /opt/Xilinx/SDSoC/2015.4/SDK/2015.4/data/embeddedsw/ThirdParty/opencv/lib/* my_root/lib/
sudo cp -r /opt/Xilinx/SDSoC/2015.4/SDK/2015.4/data/embeddedsw/ThirdParty/opencv/include/* my_root/usr/include/
3.5 压缩到CPIO和GUNZIP
sudo sh -c ‘cd my_root/ && find 。 | cpio -H newc -o’ | gzip -9 》 my_ramdisk.image.gz
3.6 添加U-BOOT头文件
mkimage -A arm -T ramdisk -C gzip -d my_ramdisk.image.gz my_uramdisk.image.gz
这里需要确保文件的权限设置为755:
sudo chmod 755 。/my_uramdisk.image.gz
3.7 在平台中更换新创建的镜像
cp 。/my_uramdisk.image.gz /pathToZyboPlatform/boot/uramdisk.image.gz
4. 在SDSoC中创建并配置一个新项目
在SDSoC中创建并配置一个新项目
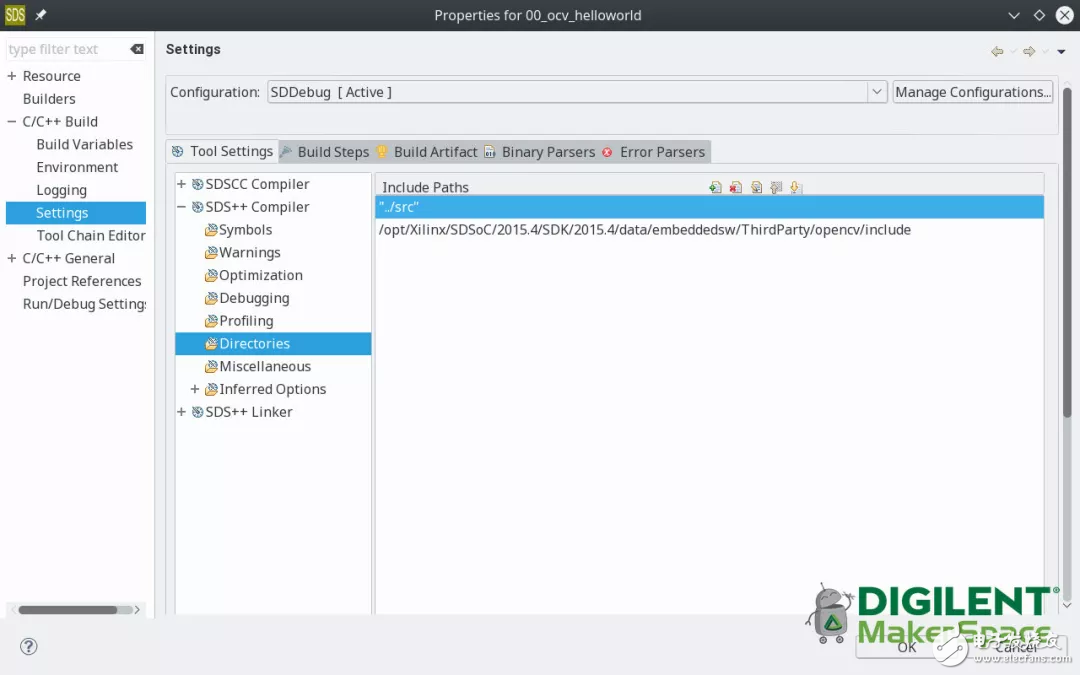
4.1 添加包含路径
创建一个新项目,选择你修改后的平台,然后选择你想要使用Linux。在project explorer(左侧面板)中右键单击项目,然后点击属性。 进入“C/C ++ build” - 》“设置” - 》 “SDS ++编译器” - 》“目录”,为所选的“build/debug/estimate配置”添加OpenCV的包含路径(/opt/Xilinx/SDSoC/2015.4/SDK/2015.4/data/embeddedsw/ThirdParty/opencv/include),如下图所示:
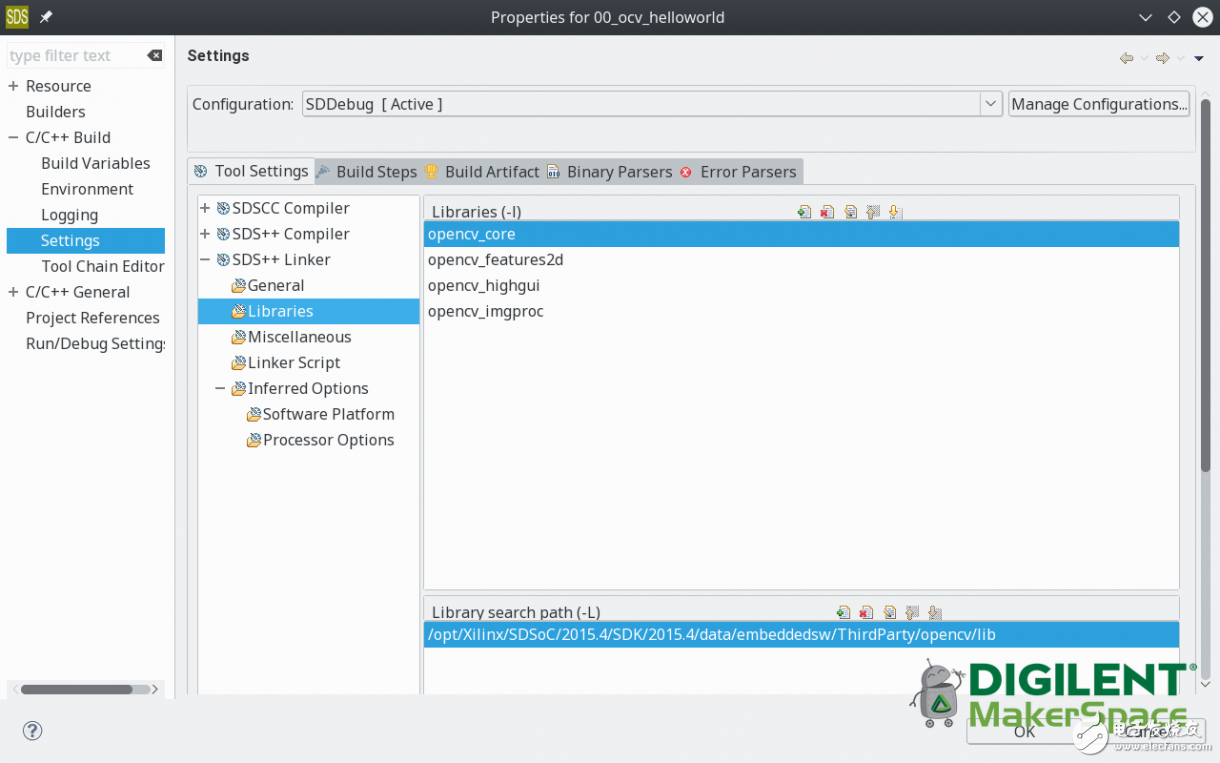
4.2 链接库
完成后,转到SDS ++ linker‘s configuration,在“库”下,添加要在项目中使用的库及其所在的路径(我这里是: /opt/Xilinx/SDSoC/2015.4/SDK/2015.4/data/embeddedsw/ThirdParty/opencv/lib )
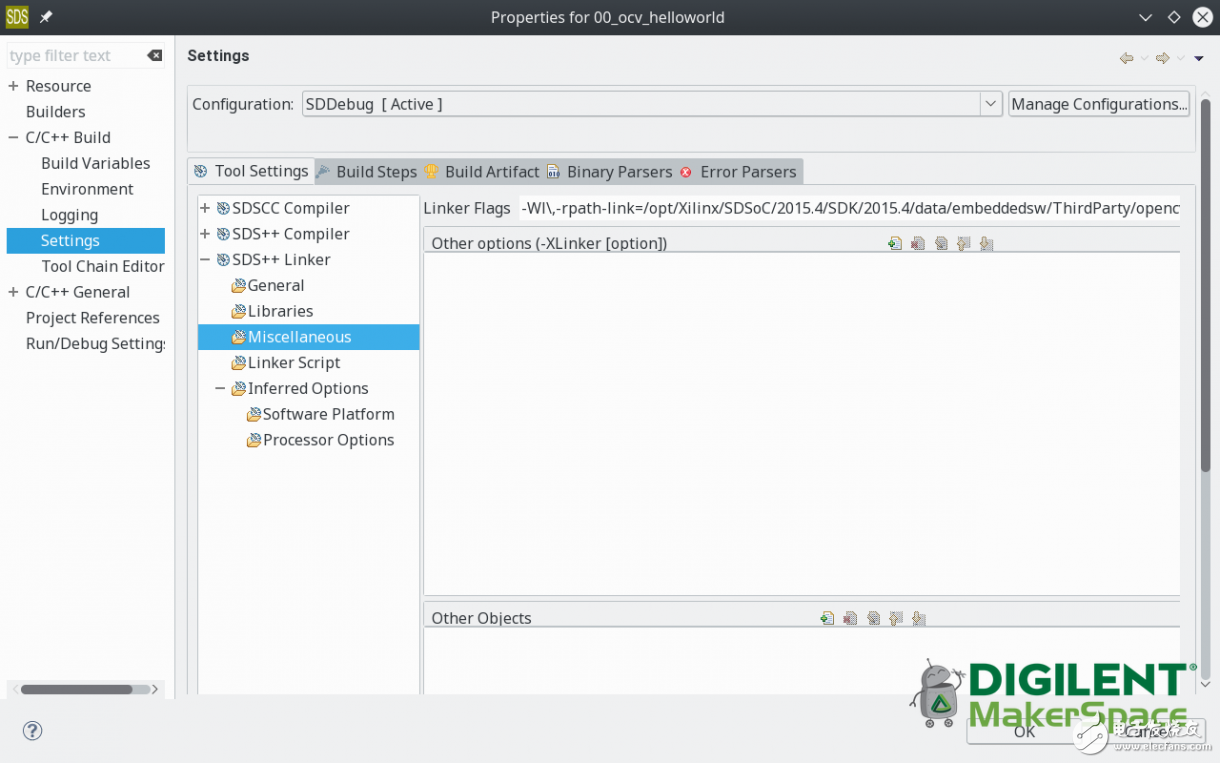
4.3 添加-RPATH-LINK
最后,你需要指定路径,使得链接器能够搜索OpenCV所需的依赖关系(libs)。 转到SDS ++linker configuration,在“Miscellaneous” - 》“Linker Flag”下添加以下行(-Wl,-rpath-link = / opt / Xilinx / SDSoC / 2015.4 / SDK / 2015.4 / data / embeddedsw / ThirdParty / opencv /LIB)。 -Wl选项向工具链表明选项-rpath-link = 。。.将被提供给链接器。
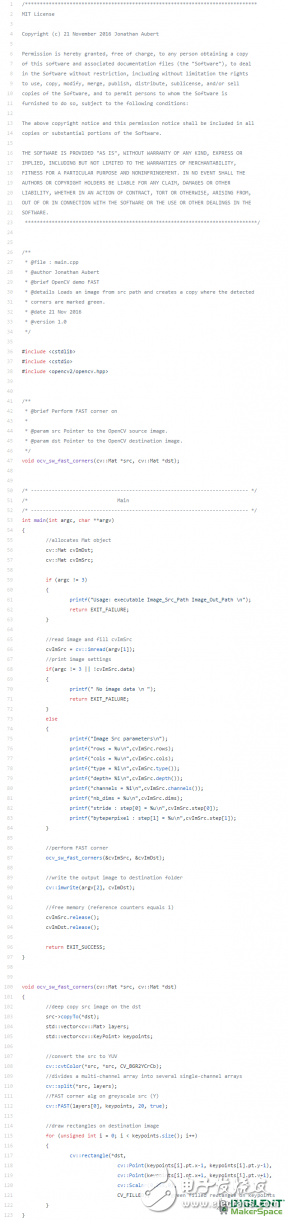
5.进行测试
到这里,我们就要进行本文中最令人兴奋的部分:测试! 以下代码将对一张图像进行FAST特征点检测:
创建你的程序,完成之后将“sd_card”文件夹中的内容复制到目标SD卡中,这里不要忘记在根目录下添加一个测试图像(有兴趣尝试的朋友,可以点击本帖附件,获取本教程所使用的图像源文件)。
boot操作完成后,使用以下命令在目标上运行可执行文件:
cd /mnt
。/00_ocv_helloworld.elf Buildings.jpg ocv.jpg
如果一切顺利的话,则可执行文件会生成一个输出图像“ocv.jpg”,如下所示:
6. 总结
我们将构建的库添加到SDSoC平台中使用的Linux根文件系统中。然后,我们基于这个新的SDSoC平台配置了一个新的项目,其中包含正确的包含路径和链接。
到这里,你就可以随意使用OpenCV啦!
- 相关推荐
- 热点推荐
- 嵌入式
-
什么是正确的HLS Webpack和SDSoC节点锁定许可证安装过程2018-12-26 2117
-
下载SDSoC,获得SDx2018-12-27 4173
-
SDSoC试用许可证弹出一条错误消息2019-01-02 2200
-
启动sdx时没有平台可用2019-01-03 2048
-
【PYNQ-Z2试用体验】caffe框架移植 一 ,为Z2 创建sdsoc custorm platform2019-01-22 3354
-
启动SDSoC 2016.1时,SDSoC无法找到清单文件错误2019-04-26 1897
-
Zybo dev如何创建一个自定义平台2020-05-25 917
-
EEJournal的“用软件来定义一切”涉及了新的SDSoC设计环节2017-02-09 385
-
什么是SDSoC平台?SDSoC的开发工作2018-06-04 8611
-
一个SDSoC设计开发流程需要哪些步骤呢?2018-06-14 2147
-
SDSoc入门例子-使用MIO驱动LED2018-08-04 2722
-
利用SDSoC创建自定义硬件2018-11-26 3204
-
赛灵思SDSoC 开发教程2019-08-01 2574
-
Xilinx SDSoC开发环境的特色功能和应用演示2020-07-02 3285
-
面向SDSoC的DNNDK用户指南2023-09-15 386
全部0条评论

快来发表一下你的评论吧 !
