

从蓝牙协议栈视角探索信道探测
描述
亲爱的蓝牙科技爱好者们,上期的“干货”希望大家看得过瘾!在本期节目中,主讲人蓝牙技术联盟技术与市场工程师鲁公羽会继续为您详解信道探测(Channel Sounding),从蓝牙协议栈的视角探索信道探测的技术细节!
节目已发布!不要错过本期精彩内容!
蓝牙技术专家带您从蓝牙协议栈视角探索信道探测!
本期亮点
信道探测技术细节
信道探测(Channel Sounding)是基于一对一已连接蓝牙设备间的测距方式,双方都需要支持信道探测的蓝牙特性。信道探测的发起者和反射者可任意选择,和蓝牙设备连接的主从模式没有相关性。
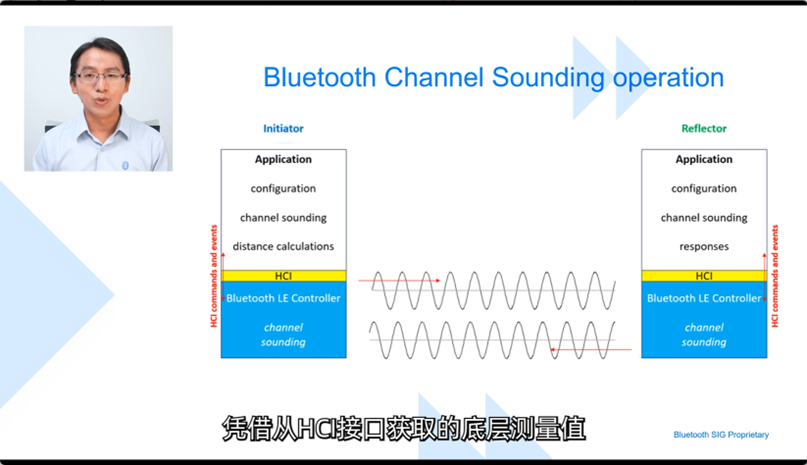
信道探测的核心功能主要集中于蓝牙controller部分。而host部分的应用层,凭借从HCI接口获取的底层测量值,通过算法优化并输出最终的测量结果。
信道探测工作流程
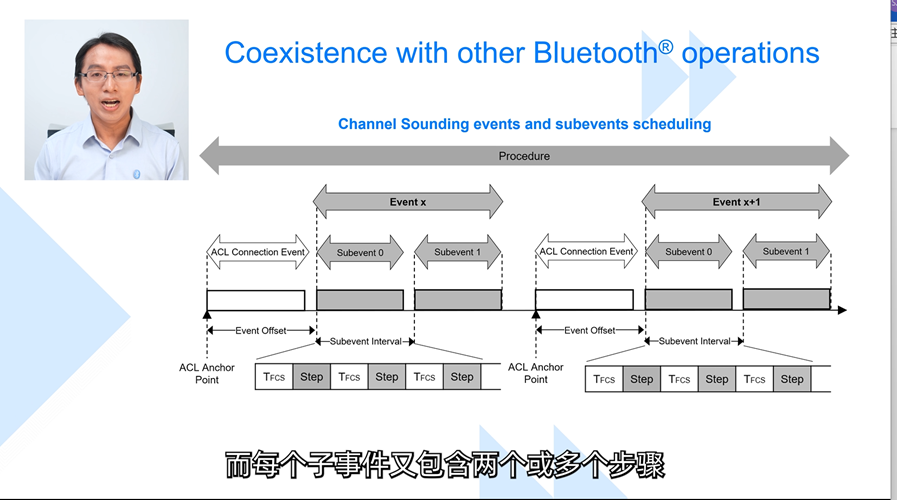
Channel Sounding测量,由流程(Procedure)、事件(Event)、子事件(Subevent)和步骤(Step)组成。ACL连接将继续充当信道探测链路层数据包交换的渠道,并为其调度提供时间参考。
信道探测事件总与ACL连接事件锚点相错开,且可包含一个或多个信道探测子事件。而每个子事件又包含两个或多个步骤。每个步骤又都会进行双向数据交换,由发起设备首先发送数据,反射设备随后进行一次或多次数据发送。
1道探测步骤里包含四种模式
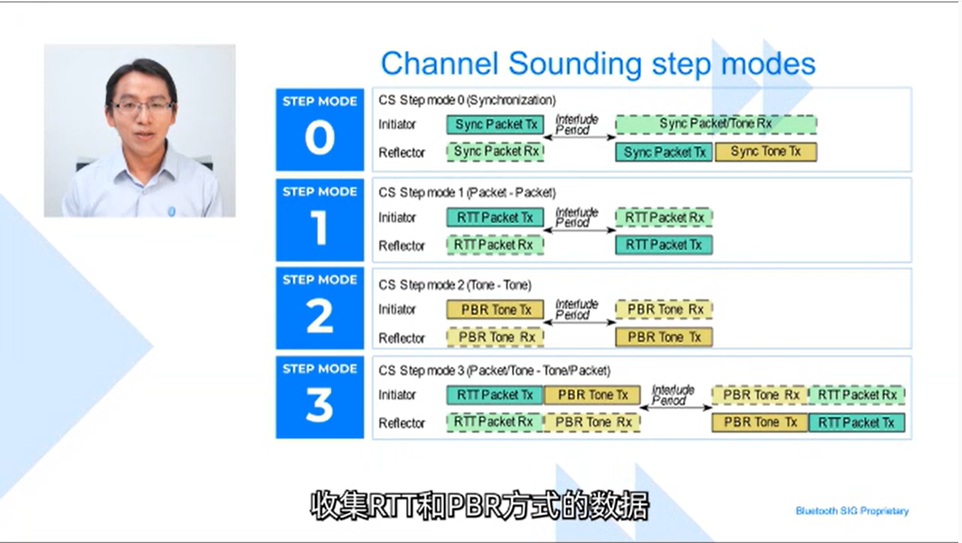
模式-0在频率和时间校准中应用, 采用CS SYNC数据包。
模式-1在往返时间(RTT)方法中应用, 采用CS SYNC数据包。
模式-2在相位测距(PBR)方法中应用,采用CS Tone数据包。
模式-3允许在单个步骤中收集RTT和PBR方式的数据。支持模式-3是可选的。
2信道探测初始化阶段
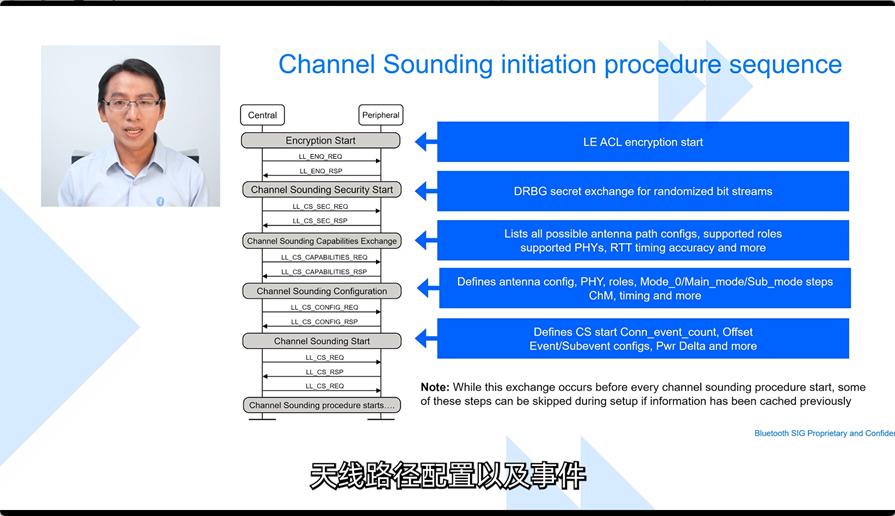
建立加密的ACL连接,用于之后的链路层数据交互。
两个设备各自生成初始化向量(CS_IV),实例化随机数(CS_IN)和个性化向量(CS_PV),通过交互,两个设备各自都拥有对方生成的数据,这将用于构建DRBG(确定性随机比特生成器)。DRBG的相关参数仅这两个建立连接的设备知晓。DRBG为Channel Sounding的测距安全性提供了保障,它用于决定信道跳频、步骤模式的使用、恒音调制、多天线路径时的传输次序、存取地址及RTT数据包的有效载荷内容等。
两个设备交互各自所支持的配置选项。如支持的天线路径,物理层,RTT时间精度,测量角色等。
由发起设备来确定测量时会选择的参数信息,并请求反射设备同意。这些参数除了包含上一步里列举的部分内容,还包括跳频所对应的Channel Map,算法选择,以及信道探测步骤里用到的模式0/主模式/子模式的构成等相关信息。
确认信道探测测量流程开始的时间偏移点,天线路径配置以及事件、子事件具体的数目和时序等信息。
-
蓝牙信道探测(Bluetooth® Channel Sounding)2026-04-16 395
-
蓝牙信道探测工作原理及开发套件2026-03-12 733
-
Nordic Android版nRF Toolbox新增蓝牙信道探测2025-12-15 1105
-
蓝牙信道探测的核心优势2025-07-24 2123
-
蓝牙信道探测,精准简易的无线测距方案2025-07-08 2856
-
蓝牙信道探测,简单可靠的无线测距方案2025-07-07 709
-
芯科科技新型蓝牙信道探测开发板的设计示例2025-04-11 1779
-
蓝牙信道探测概念、应用及发展趋势2024-12-23 1960
-
蓝牙信道探测技术与应用论坛顺利举办2024-11-01 1611
-
芯科科技专家分享信道探测新应用2024-10-21 1435
-
恩智浦受邀出席蓝牙信道探测技术与应用论坛2024-10-11 1876
-
为什么蓝牙信道探测将引领高精度定位服务?2024-04-03 2108
-
低功耗蓝牙协议栈介绍2023-02-03 771
-
关于蓝牙协议栈的应用2019-08-01 2288
全部0条评论

快来发表一下你的评论吧 !
