

自适应模糊神经网络的交通灯控制系统的设计
控制/MCU
描述
针对我国城市交通的现状,机动车辆数量越来越多,而传统的交通信号灯控制模式采用的是定时控制,本文将模糊控制技术引入交通信号控制,实现交通灯的自适应控制,对整个区域的信号系统进行全局优化调度,实现交通灯控制的智能化。
1、系统结构
整个系统分为管理层、优化调度层、数据采集层。管理层为最高指挥层,它能在交通管制等紧急情况下进行宏观调度。基础数据采集主要采集各车辆计数仪的实时数据,通过通信网将数据传输到交通管控中心,管控中心利用专家系统和神经网络等技术对全局交通进行优化调度,在此基础上形成调度指令,通过通信网反馈至各交叉口,各交叉口结合调度指令和该交叉口的实时交通流信息,利用模糊控制的策略对该交叉口的信号进行控制。
2、单个交叉口红绿灯的模糊控制
经研究,对单个交叉口而言,当交通需求较小时,信号周期T应短一些,但一般不能少于Px15s(P为相位数)以免某一相位的绿灯时间tgi小于15s使车辆来不及通过路口影响交通安全;当交通需求较大时,信号周期T则应长一些,但一般不能超过120s,否则某一方向的红灯时间将超过60s,驾驶员心理上不能忍受。当交通需求很小时,一般按最小周期运行;当交通需求很大时,只能按最大周期控制,此时,车辆堵塞现象已不可避免。根据专家的经验,单个交叉路口的模糊控制算法可描述为图1所示。
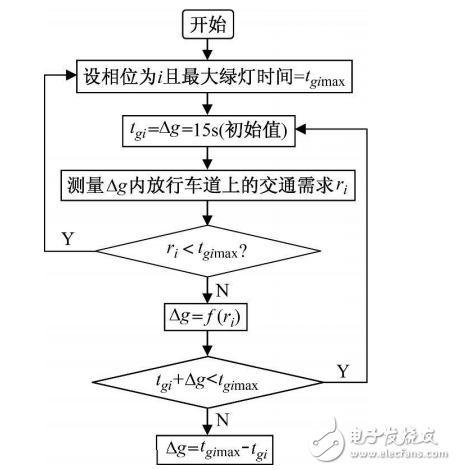
图1 单个交叉路口的模糊控制算法
算法中的交通需求通常用两种方法描述,一是用交叉口停止线前的排队长度即停止线前相隔一定距离(通常为80~100m)的两检测器之间的车辆数来表示交通需求;另一种方法是:当占有率不低于某一基准占有率时,用占有率表示交通需求;当占有率小于某一基准占有率且交通量不低于某一基准交通量,则用交通量表示交通需求。检测器在指定的时间内(通常为5min)测得的计数值(方波数)为交通量;检测器在指定的时间内(通常为5min)测得的方波宽度总和与该时间值的比为占有率。建立模糊表如表1和表2所示,根据日常控制经验可得如表3所示模糊控制规则表。表中L表示车辆排队长度,G表示绿灯时间。
表1 车辆排队长度变化模糊表
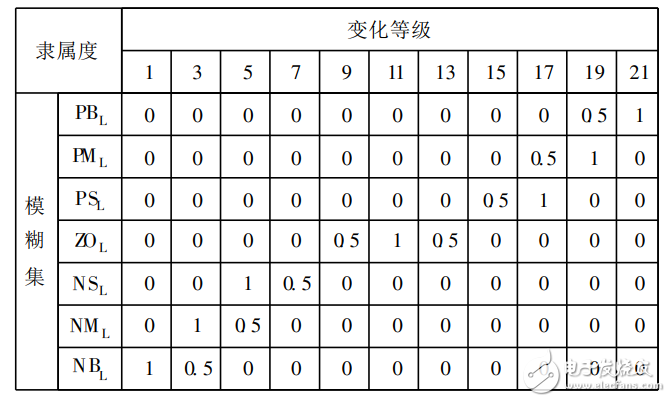
表2 第i相位绿灯时间变化模糊表
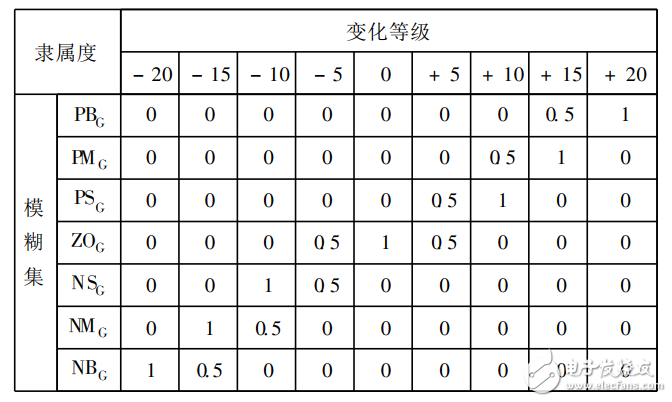
表3 模糊控制规则表

3、基于专家系统与神经网络的全局优化调度
单个交叉口的控制要服从全局的调度,局部的最优要服从全局的最优。在实现交通全局优化调度主要有两方面的工作要做:一是要取得路网中当前的和过去若干时段内的交通信息,二是逐步推测未来若干时段内路网各交叉口和各路段的交通流状态。整个调度过程不断滚动循环进行。目前,动态交通信息的获得可采用适当的接口技术,通过自适应式的交通面控系统实现。在交通全局优化调度中,尚未解决的是全局优化调度的依据问题,即如何调度才能起到避免拥挤和堵塞、提高路网使用效率的目的。人工神经网络技术具有非线性描述、大规模并行分布处理能力、高度鲁棒性和学习与联想等特点,适用于非线性时变大系统的模拟与在线控制。
通常情况下,城市交通网络在一定时期(一年或几个月)内几何结构不会发生大的变化,而且交通需求情况较稳定(或变化缓慢),可以认为日交通流的时空分布是稳定的。由于日交通流的时空分布具有高度时变和非线性的特点,因此,采用高阶神经网络技术建立模型,以达到快速准确预测的目的。在城市交通网络中,各路段的流入、流出交通量是网络交通需求量、道路与交叉口通行能力、信号配时以及交通管制措施等因素综合作用的结果,因而在预测时无需单独考虑这些因素对交通流量的影响。
4、模糊神经网络的调度算法
模糊逻辑控制的特长在于能以一定的规则数来表达知识,具有逻辑推理能力,不仅能处理精确信息,也能处理模糊信息或其他不明确信息;其缺点是完全依赖专家制定的大量控制规则,不具备学习功能。而神经网络具有自学习能力和大规模并行处理能力,在认知处理、模式识别方面有很强的优势;主要缺点是结构难以确定,训练样本要求多且准确,训练周期长,而且不能提供一个明确的用于网络知识表达的框架。模糊神经网络是为发挥各自的优势把神经网络和模糊逻辑有机结合起来,采取神经网络技术来进行模糊信息处理,使得模糊规则的自动提取及模糊隶属函数的自动生成成为可能,进而克服神经网络结构难以确定以及模糊逻辑元自学习功能的缺点,使模糊系统成为一种自适应模糊系统。
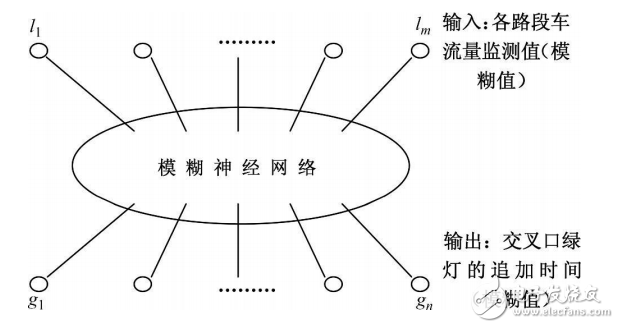
图2 模糊神经网络模型
采用神经网络技术来进行模糊信息处理有多种做法,其中,构造各类模糊神经元及模糊神经网络作为信息处理单元以实现模糊信息的自动处理是最主要的一种。所谓模糊神经元是指可实施模糊信息处理或模糊逻辑运算的人工神经元,而模糊神经网络则是全部或部分采用各类模糊神经元所构成的可处理模糊信息的神经网络系统。在本系统中,如图2,整个神经网络的建立和使用分以下几步完成:
(1)利用专家的知识粗略地形成模糊模型(包括一些模糊规则和模糊推理方法)。
(2)基于这一模糊模型构成模糊神经网络。
(3)训练神经网络。通过系统仿真来训练神经网络,对每一种输入值(l1,...,lm),选择一种输出值(g1,...,gn),利用系统仿真来模拟系统在给定的时间内所有车辆的平均等待时间;系统的能量函数选为所有车辆的平均等待时间;神经网络训练的目标在于使能量函数最小。
(4)网络的应用。神经网络的输入数据是在统计数据和实时数据的基础上进行预测得到的,这就要求实时地采集数据,周期性地统计和存储数据,预测到神经网络的输入后,经过网络的计算,再较精确地辩识出交通模式,对不同的模式采取适合其特点的相应控制算法,选出红绿灯控制方案。
5、结束语
本文研究了一种利用模糊控制、神经网络等技术对交通系统进行全局优化调度的交通灯控制系统。该模糊控制策略是一种复合策略,它能在管控中心的控制下进行调整。通过大量的模糊数据输入,对神经网络进行训练,以达到全局优化的调度。虽然在全局调控与局部模糊控制的配合使用仍有许多问题有待以解决,但随着研究的继续进行,该方法将会成为解决我国中等城市交通控制问题的一个好办法。
-
labview交通灯控制系统2023-04-20 1737
-
基于模糊神经网络的微型涡喷发动机控制系统2021-06-23 1012
-
神经网络自适应控制及其发展应用2021-05-31 1368
-
基于模糊控制的智能交通灯监控系统的毕业设计2018-01-09 6470
-
交通灯控制系统设计2017-09-21 1254
-
智能交通灯控制系统2014-05-07 23350
-
路口交通灯实时模糊控制系统设计2011-12-14 810
-
粒子群优化模糊神经网络在语音识别中的应用2010-05-06 2531
-
基于自适应神经网络模糊推理的负荷预测2009-12-18 797
-
基于模糊神经网络的双吊点闸门同步控制的研究2009-06-09 513
-
自适应模糊神经网络研究2009-06-06 711
-
三容系统的自适应-模糊神经网络解耦及液位控制2009-01-17 1040
全部0条评论

快来发表一下你的评论吧 !
