

智能化斑马线交通灯控制系统设计
控制/MCU
描述
1、引言
随着经济的发展,汽车数量增多,城市道路压力越大。人车密集的路上经常出现人车争道的现象,因此造成的交通事故经常发生。很多城市采用了斑马线交通灯以平衡行人和车辆的关系,但忽视了不同时段的实时交通状况,无法满足多变的交通需求,本文设计的智能化斑马线交通灯可根据行人数量与车流量及时调整交通灯控制结果,较好的应对相应问题。
2、系统总体方案设计
交通灯行人指示方向可显示红绿两色及时间,车辆指示方向显示红绿黄三色及时间,其中行人指示方向的红灯时间等于车辆指示方向绿灯和黄灯时间之和,行人指示方向的绿灯时间等于车辆指示方向红灯时间。双向通过近似采集车流量及等待过马路行人数量,实时调节双向通行时间,车辆高峰期间,行人积累到较高预设值时可开启过路计时,通行时间控制较短;车辆低峰时段相反,其中行人数量捕捉由计数器或压力传感器完成,此方案采用压力传感器完成。根据任务要求,所设计的系统主要由以下几个模块组成:①控制及扩展模块;②检测及转换模块;③复位及晶振模块;④显示模块。其结构框图如图1所示。
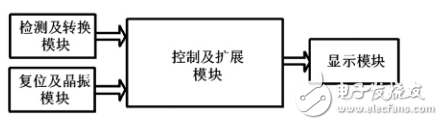
图1 系统的总体框图
在该系统中,控制及扩展模块用来完成系统的控制任务;检测及转换模块的作用是通过压力传感器测量道路的车流量与行人道等待通行的人数量,并将其转换为数字量以便单片进行处理;复位及晶振模块的作用是结合单片机内部电路产生单片机所需的时钟频率以及在不同需求下对电路进行复位;显示模块的作用是显示设定的通行或等待时间。
3、硬件设计
3.1、控制及扩展模块
(1)控制模块控制部分采用MCS-51系列单片机8051,其价格低廉,结构简单,易于开发,有较强的位处理功能,有全双工异步串行通信口。其中,每秒钟的设定采用计数器硬件软件相结合的方式延时。单片机的主脉冲频率经过12分频后,1s将超过计数器的最大定时时间,采用在主程序中设定一个初值为20的软件计数器使T0定时50ms。这样每当T0到50ms时CPU就响应溢出中断请求,进入中断服务子程序。在中断服务子程序中,CPU先使软件计数器减1,然后判断它是否为0,为0表示1s已到,可以返回输出时间显示程序。8051时钟频率可1.2~12MHz之间任意选择,在不影响系统总功率的前提下,时钟频率选择低一些可降低系统对其它元器件工作速度的要求,从而降低成本和提高系统的可靠性。本系统单片机器时钟频率采用6MHz。
(2)扩展模块MCS-51系列单片机共有4个8位并行I/O口,但这些I/O口并不能完全提供给用户使用。对于内有ROM/EPROM的单片机8051,在不使用外部扩展时,才允许这4个I/O口作为用户I/O使用,然而对于大多数8051需外部扩展时,MCS-51单片机可提供给用户使用的I/O口只有P1口和P3口,因此,在大部分的MCS-51单片机应用系统设计中都不可避免地要进行I/O口的扩展。
3.2、检测及转换模块
系统采用压力传感器可以测量某一时刻行人与车流量状况,将其转换为相应电流信号,经过放大和滤波,输入到A/D转换装置中,并形成数字信号输入到单片机中。单片机预设相应值与输入值进行对比,调整双向信号灯时间以控制通行时间。其中,设行人平均体重在40~100kg,车辆质量平均为200kg~10t,可采用PTH501压力传感器作为检测仪器,其量程为0~1~150(MPa),精度为±0.2%FS,响应时间为5ms。
检测及转换模块原理框图如图2所示。
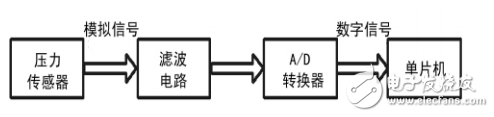
图2 检测及转换模块原理框图
3.3、复位及晶振模块
(1)复位模块
复位是单片机的初始化操作,其主要功能是把PC初始化为0000H,使CPU从0000H单元开始执行程序。除了进入系统的正常初始化之外,当由于程序运行出错或操作错误使系统处于死锁状态时,为摆脱困境,也需按复位键重新启动。此设计采用自动复位方式,为保证复位成功,只要复位端口保持足够时间(即两个周期以上)的高电平,就可以实现系统自动上电复位。
(2)晶振模块
8051内部有1个用于构成振荡器的高增益反相放大器。引脚XTAL1和XTAL2分别是此放大器的输出端和输入端。这个放大器与片图3时钟电路外石英晶体和陶瓷谐振器一起构成了一个自激振荡器,接线如图3所示。外接晶体时,C1和C2通常选择为30pF;外接陶瓷谐振器时,C1和C2的典型值约为47pF。它的振荡频率在1.2~12MHz。它采用12MHz晶振,与8051单片机的XTAL1和XTAL2相接,为CPU提供计时基准。
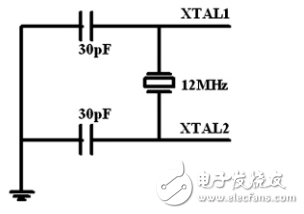
图3 时钟电路
3.4、显示模块
LED(Light-EmittingDiode)是发光二极管的简称,LED数码管结构简单,发光效率高,生产成本低,工作性能稳定高效,寿命长,颜色鲜艳,易于观察,经济实惠,性价比高,可减少接口数目,同时LED还有节能、安全和环保等优点。采用8段共阴数码管及动态驱动显示。
4、软件部分
软件设计是系统控制部分的核心,当系统启动并初始化以后,通过设置在不同位置的压力传感器收集到行人与道路的流量信息并分别进行处理,然后将输出进行模数转换,与单片机预先设定控制内容进行对照,并形成控制方案,最终进行显示以用来给予两向通行者的提示。系统主程序流程如图4所示。
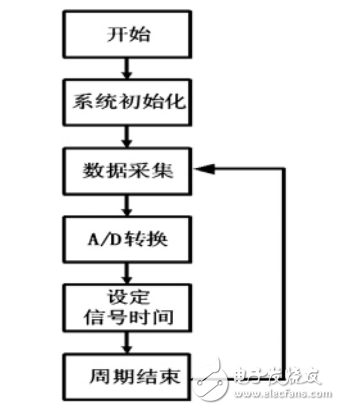
图4 主程序流程图
5、总结
本系统是以单片机8051芯片为核心控制部件,通过设在双向的压力传感器实现了根据实时交通状况调整双向红、绿灯燃亮时间,达到了较好的控制效果,具有适用性强、操作简单、扩展性强、可靠性高、设计周期短、维护方便等优点。
-
labview交通灯控制系统2023-04-20 1587
-
交通灯智能控制系统的设计2020-07-16 2785
-
交通灯定时控制系统的设计资料说明2020-06-28 1074
-
智能发光斑马线的原理分析2019-11-09 11957
-
以车流量为核心的智能交通灯自动控制系统2018-01-09 22513
-
基于FPGA技术的智能交通灯控制系统设计2018-01-08 8143
-
交通灯控制系统设计2017-09-21 1208
-
智能交通灯控制系统2013-03-26 2267
-
【labview课程设计】基于labview的交通灯模拟系统2011-12-31 157570
-
交通灯控制系统电路图2008-05-22 6155
全部0条评论

快来发表一下你的评论吧 !
