

Buck型数字变换器系统结构
变流、电压变换、逆变电路
描述
1、数字控制Buck型变换器系统结构
数字控制Buck型变换器的系统框图如图1所示。反馈控制回路中包含AD采样器、误差生成器、PID控制器以及PWM波形产生器等模块,所有模块均以数字处理芯片作为载体,通过编程方式实现。
图1 数字控制Buck型变换器系统框图
2、数字PID控制器设计
数字系统是离散系统,但如果采样周期足够小,则数字系统可近似于连续系统。采用频域补偿设计方法实现模拟PID控制器的参数整定,通过连续系统离散化处理,可最终实现数字PID控制器的参数设计。
2.1、模拟PID控制器的参数整定
连续导电模式(CCM)下,Buck型变换器控制对象的传递函数为:
直流增益:
ADC=nUi/Um,UM为PWM产生器的锯齿波峰峰值;极点角频率:
品质因数:Q=R√C/R。
Buck型变换器的典型频率特性曲线如图2所示。
由频率特性曲线可知:
(1)幅频特性的低频段曲线平坦,欲消除闭环系统的稳态误差,补偿网络的设计应至少含有一个积分环节;(2)主极点wp由LC输出滤波器产生,表现为一个双重极点,产生180°的滞后相移,系统相位裕量偏低。
图2 连续导电模式(CCM)下Buck型变换器频率特性曲线
模拟PID控制器的传递函数为:
式中:Kp=K(wz1+wz2)/(wz1wz2);Ki=K;Kd=K/(wz1wz2)。
模拟PID控制器的典型频率特性曲线如图3所示。补偿网络可提供一个原点处极点用以消除系统的静态误差,同时提供两个零点可补偿主极点造成的180°滞后相移,有效提高系统的相位裕量。
在分析了Buck型变换器及模拟PID控制器典型频率特性的基础上,采用频域补偿设计法配置补偿网络零极点,实现模拟PID控制器的参数整定。
模拟PID控制器零极点配置原则如下:
(1)选择补偿后系统开环传递函数的穿越角频率:
穿越角频率wc一般取1/10~1/5的开关角频率ws处,以在保证系统稳定性的前提下,使输出响应具有良好的动态特性;(2)确定补偿网络两零点角频率:补偿网络的两零点角频率wz1、wz2设计为控制对象主极点角频率wp的1/2左右,以补偿主极点产生的180°滞后相移,提高系统的相位裕量;(3)计算补偿网络的增益值:在穿越角频率wc处补偿后系统开环传递的增益为零,即|Gvdm(s)|s=jwc=1/|Gc(s)|s=jwc,据此计算补偿网络增益值K。
按照以上步骤即可完成模拟PID控制器参数(Kp、Ki、Kd)的整定。
图3 模拟PID控制器典型频率特性曲线
2.2、数字PID控制器的参数设计
数字PID控制器的控制算式为:
式中:Δup=e(k)-e(k-1);Δu1=e(k);ΔuD=e(k)-2e(k-1)+e(k-2)。
模拟PID控制器参数整定完成后,将模拟控制器离散化即可实现数字PID控制器的设计。本文选用后向差分法作为连续系统离散化方法。
后向差分公式为:
3、Buck型变换器数字PID控制器设计实例
仿真用Buck及全桥变换器的电路参数如表1所示,数字PWM脉冲产生器均按D=u(k)/M设计,其中M=4(M对应于模拟PWM产生器的锯齿波峰峰值Um)。
模拟PID控制器零极点均按照以下方式配置:wc=1/5ws,wz1=wz2=1/2wp,则模拟及数字PID控制器整定参数如表2所示,采样周期T=1×10-7s。
表1仿真用Buck及全桥变换器电路参数
表2仿真用Buck及全桥变换器模拟及数字PID控制器整定参数
根据图1所示的数字控制Buck变换器系统框图,依据电路参数及数字PID控制器整定参数,在MATLAB/SIMULINK仿真环境中建立数字控制Buck及全桥变换器仿真模型,仿真结果如下:
额定负载条件下,数字控制Buck及全桥变换器输出电压响应如图4所示。
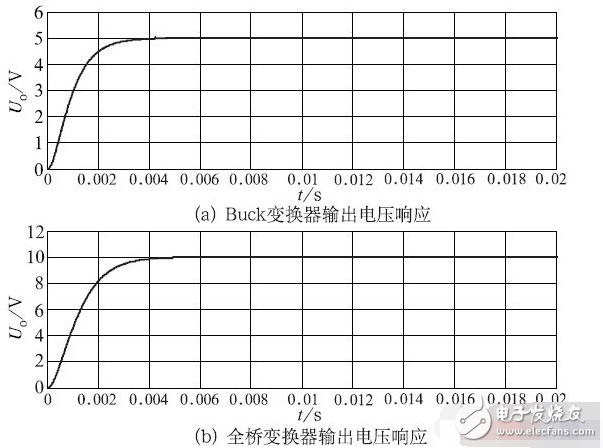
图4 额定负载条件下输出电压响应
额定负载突变至50%额定负载条件下,数字控制Buck及全桥变换器的输出电压响应如图5所示。
图5 负载突变情况下,输出电压响应
-
如何优化Buck-Boost型变换器的性能2024-08-14 2482
-
电压反馈型BUCK变换器的环路补偿设计2023-11-01 690
-
Buck变换器的工作原理结构及其过程分析2023-03-15 2003
-
BUCK变换器的DCM模式建模2021-12-30 2043
-
BUCK变换器设计2021-11-16 1856
-
DCDC降压型BUCK变换器应用于汽车电子系统中的设计技巧有哪些?2021-07-28 2424
-
BUCK型DC-DC变换器的建模与仿真相关资料分享2021-06-30 3085
-
基于Buck-Boost的双向DCDC变换器原理分析2021-03-01 27264
-
Buck变换器的工作原理与设计的学习课件免费下载2020-12-07 1631
-
buck变换器介绍_buck变换器设计2018-01-10 9899
-
【分享】Buck变换器的设计与仿真2015-05-25 11354
-
BUCK变换器2012-08-14 4221
全部0条评论

快来发表一下你的评论吧 !
