

简单的介绍人机协作机器人UR
描述
在这几年,各大工业机器人制造商,目前都热衷与人机协作,ABB的“玉米”,FANUC的“绿手臂”,KUKA的“伊娃”等等,在人机协作走的比较前的也就数UR了,我们来简单介绍下UR的黑科技,来看下如何用手来教训机器人。
UR5 机器人自重很轻(仅 18.4 kg ),可以方 便地在生产场地移动,而且不需要繁琐的安装与 设置就可以迅速地融入到生产线中,与员工交互合作。编程过程可通过教学编程模式实现,用户可以扶住 UR 机械臂,手动引导机械臂,按所需的 路径及移动模式运行机械臂一次, UR 机器人就能 自动记住移动路径和模式。机器人通过一套独特 的、友好的图形用户界面操作,在触摸屏幕上, 有一系列范围广泛的功能让用户选择。任何重复性的生产过程,都能够使用它并从中受益。
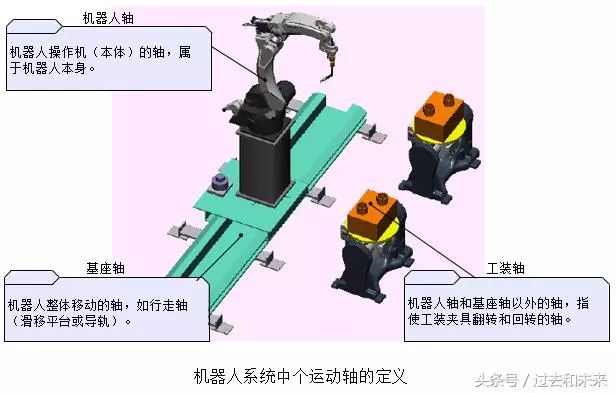
1、机器人运动轴的名称
通常机器人运动轴按其功能可划分为机器人轴 、基座轴和工装轴 ,基座轴和工装轴统称外部轴 。
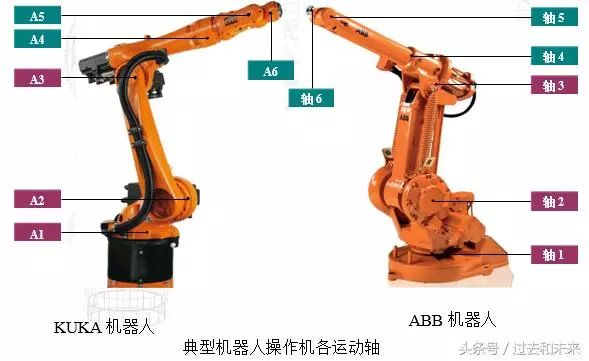
A1 、A2 和 A3 三轴(轴 1 、轴 2 和轴 3 )称为基本轴或主轴, 用以保证末端执行器达到工作空间的任意位置。A4 、A5 和 A6 三轴(轴 4 、轴 5 和轴 6 )称为腕部轴或次轴, 用以返回实现末端执行器的任意空间姿态。
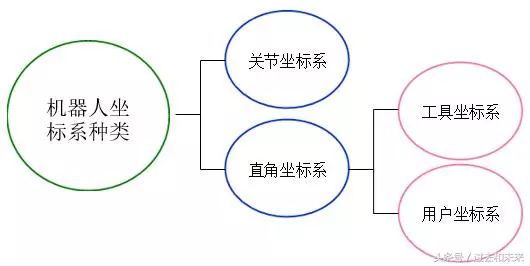
2、机器人坐标系的种类
目前,大部分商用工业机器人系统中,均可使用关节坐标系、直角坐标系、工具坐标系和用户坐标系, 而工具坐标系和用户坐标系同属于直角坐标系范畴 。
TCP 为机器人系统控制点,出厂是默认位于最后一个运动轴或安装法兰的返回中心,安装工具后 TCP 点将发生改变。
(1) 关节坐标系
在关节坐标系下,机器人各轴均可实现单独正向或反向运动。对大范围运动,且不要求 TCP 姿态的,可选择关节坐标系。

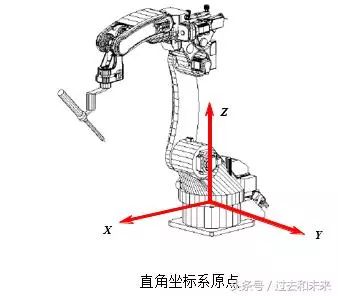
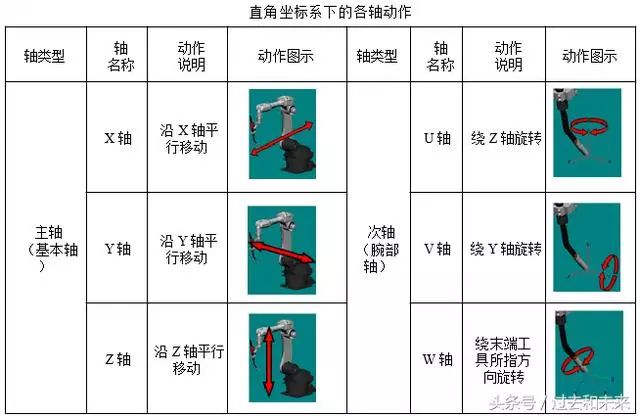
(2) 直角坐标系(世界坐标系、大地坐标系)
机器人示教与编程时经常使用的坐标系之一 ,原点定义在机器人安装面与第一转动轴的交点处, X 轴向前, Z轴向上, Y 轴按右手法则确定。
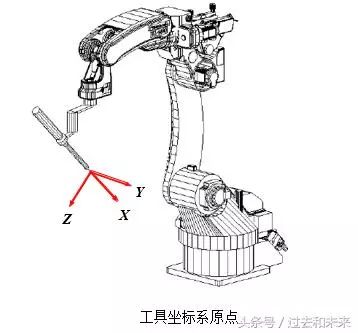
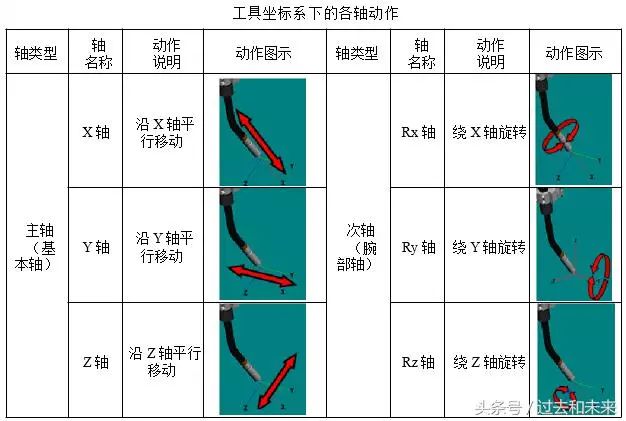
(3) 工具坐标系
原点定义在 TCP 点,并且假定工具的有效方向为 X 轴(有些机器人厂商将工具的有效方向定义为 Z 轴),而 Y 轴、 Z 轴由右手法则确定。 在进行相对于工件不改变工具姿态的平移操作时选用该坐标系最为适宜。
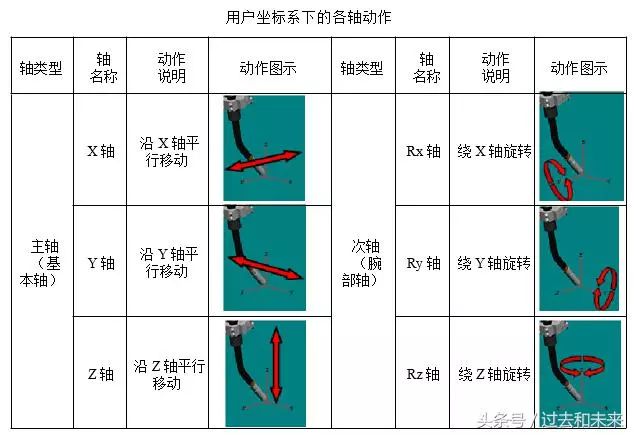
(4) 用户坐标系
可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。

不同的机器人坐标系功能等同,即机器人在关节坐标系下完成的动作,同样可在直角坐标系下实现。
机器人在关节坐标系下的动作是单轴运动,而在直角坐标系下则是多轴联动。除关节坐标系以外,其他坐标系均可实现控制点不变动作(只改变工具姿态而不改变 TCP 位置)在进行机器人 TCP 标定时经常用到。

3、认识示教器

- 相关推荐
- 机器人
-
智能制造时代来临 工业机器人发展迎来新趋势2017-08-17 0
-
机器人VS人:替代还是协作?2018-09-20 0
-
协作机器人伺服和传感器核心器件揭秘2018-10-12 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
协作型机器人的应用类型2020-12-01 0
-
机器人圈专访:对新品人机协作Sawyer机器人都有什么看法?2016-12-07 984
-
值得关注的十大人机协作机器人的简单介绍2018-01-17 16461
-
协作机器人的起源_为什么需要协作机器人2019-07-07 8303
-
优傲机器人宣布交付其第50000台UR协作机器人2020-12-21 2413
-
什么是协作机器人?协作机器人如何选择2020-12-29 7412
-
ABB的协作机器人强势登场2021-03-06 5793
-
优傲协作机器人e系列的简单介绍2022-05-08 657
-
人机协作机器人在工业的应用2022-09-26 979
-
交互的艺术:协作机器人如何定义新一代的人机关系?2023-11-29 1031
-
优傲机器人升级高负载协作机器人,助力客户生产效率飞跃2024-10-25 403
全部0条评论

快来发表一下你的评论吧 !
