

STM32通过I2C与BMP280通信
嵌入式设计应用
描述
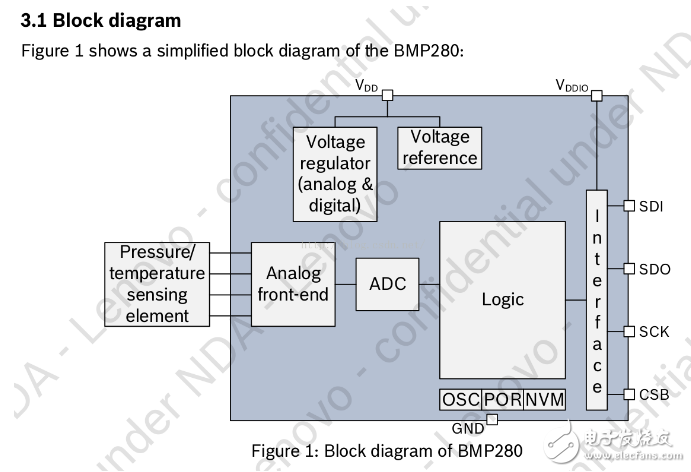
BMP280是博世最新推出的数字气压传感器,具有卓越的性能和低廉的价格,相对精度为±0.12 hPa(相当于±1米),传感器功耗仅有2.7μA。BMP280具有业界最小封装2.0 x 2.5 x 0.95 mm3,包括压力和温度测量功能。
该气压传感器支持SPI和IIC通信接口,相比上一代的BMP180,精度已有相当大的提升,非常适合应用于低成本的多旋翼飞行器飞行控制器上,价格仅有目前流行的MS5611的四分之一。
STM32通过I2C与BMP280通信
BMP280气压传感器(Digital Pressure sensor)
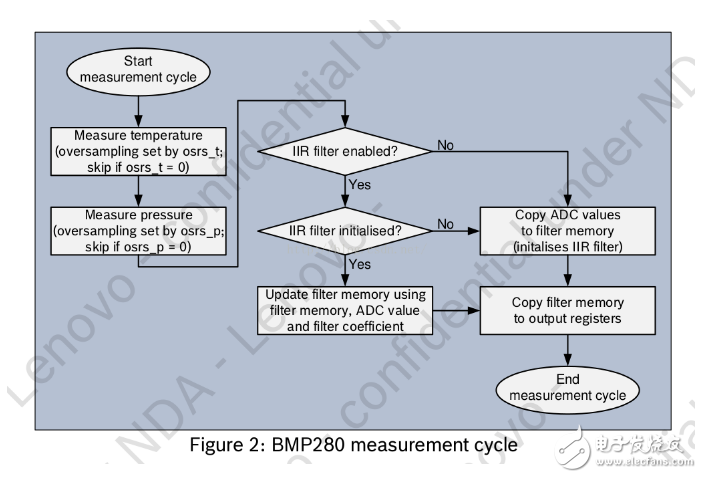
测试流程图:
项目中使用的是I2C通信,BMP280的作为slave的地址要确认好,它的地址根据硬件电路SDO接什么脚来决定:
1.BMP280的测试启动流程(注意它的datasheet中的status寄存器):
(1)读取BMP280的id,其值等于0x58。
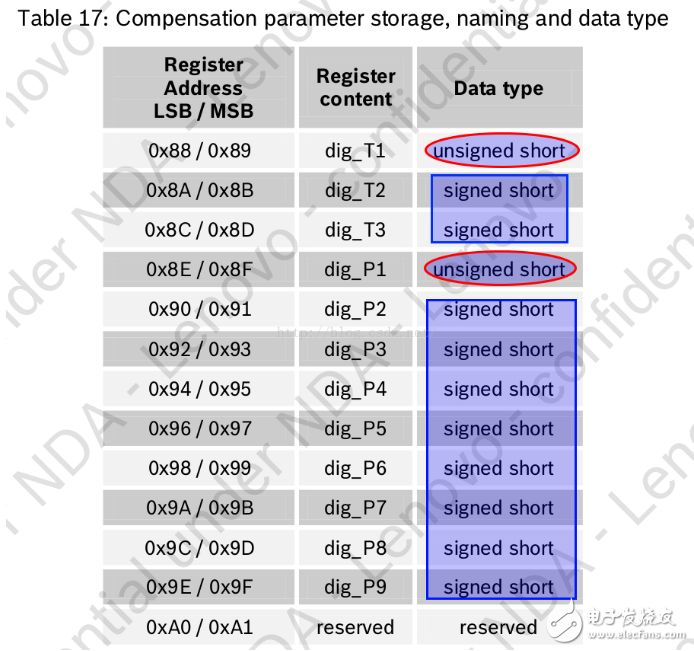
(2)把补偿寄存器的值都读出来。
(3)对BMP280进行reset。
(4)对BMP280的数据采集精度,模式。。。等进行配置。
(5)给点延时,等待数据采集完毕放入寄存器中。
(6)读取寄存器中的采集数据。
注意:BMP280对温度和气压的测量是通过一堆补偿数据然后根据自己的算法算出来的,要注意这些数据是什么类型的,刚开始我就因为粗心没看清楚,算出来的数据总是不正确。
下面把代码贴出来:
1.bmp280的驱动文件:
#include 《stdlib.h》
#include “stm32f4xx_hal.h”
#include “stm32f4xx_hal_i2c.h”
#include 《sensors/bmp280.h》
#define dig_T1 bmp280-》T1
#define dig_T2 bmp280-》T2
#define dig_T3 bmp280-》T3
#define dig_P1 bmp280-》P1
#define dig_P2 bmp280-》P2
#define dig_P3 bmp280-》P3
#define dig_P4 bmp280-》P4
#define dig_P5 bmp280-》P5
#define dig_P6 bmp280-》P6
#define dig_P7 bmp280-》P7
#define dig_P8 bmp280-》P8
#define dig_P9 bmp280-》P9
static uint8_t bmp280_read_register(I2C_HandleTypeDef Bmp280_I2cHandle, uint8_t reg_addr)
{
uint8_t reg_data;
while(HAL_I2C_Master_Transmit(&Bmp280_I2cHandle, BMP280_ADDRESS, ®_addr, 1, 10000) != HAL_OK) {
if(HAL_I2C_GetError(&Bmp280_I2cHandle) != HAL_I2C_ERROR_AF) {
printf(“Transmit slave address error!!! ”);
return -1;
}
}
while(HAL_I2C_Master_Receive(&Bmp280_I2cHandle, BMP280_ADDRESS, ®_data, 1, 10000) != HAL_OK) {
if(HAL_I2C_GetError(&Bmp280_I2cHandle) != HAL_I2C_ERROR_AF) {
printf(“Receive slave data error!!! ”);
return -1;
}
}
return reg_data;
}
static void bmp280_write_register(I2C_HandleTypeDef Bmp280_I2cHandle, uint8_t reg_addr, uint8_t reg_data)
{
uint8_t tx_data[2] = {reg_addr, reg_data};
while(HAL_I2C_Master_Transmit(&Bmp280_I2cHandle, BMP280_ADDRESS, tx_data, 2, 10000) != HAL_OK) {
if(HAL_I2C_GetError(&Bmp280_I2cHandle) != HAL_I2C_ERROR_AF) {
printf(“Transmit slave address error!!! ”);
}
}
}
/**
* 在bmp280_init()函数里默认初始化t_standby为0.5ms,
* 温度和气压的采样精度设为最低,
* 滤波器系数设为最低,
* 并且进入sleep mode。
*/
struct bmp280 *bmp280_init(I2C_HandleTypeDef I2cHandle)
{
uint8_t bmp280_id;
uint8_t lsb, msb;
uint8_t ctrlmeas_reg, config_reg;
struct bmp280 *bmp280;
bmp280_id = bmp280_read_register(I2cHandle, BMP280_CHIPID_REG);
if(bmp280_id == 0x58) {
bmp280 = malloc(sizeof(struct bmp280));
bmp280-》I2cHandle = I2cHandle;
bmp280-》mode = BMP280_SLEEP_MODE;
bmp280-》t_sb = BMP280_T_SB1;
bmp280-》p_oversampling = BMP280_P_MODE_1;
bmp280-》t_oversampling = BMP280_T_MODE_1;
bmp280-》filter_coefficient = BMP280_FILTER_MODE_1;
} else {
printf(“Read BMP280 id error! ”);
return NULL;
}
/* read the temperature calibration parameters */
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_T1_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_T1_MSB_REG);
dig_T1 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_T2_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_T2_MSB_REG);
dig_T2 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_T3_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_T3_MSB_REG);
dig_T3 = msb 《《 8 | lsb;
/* read the pressure calibration parameters */
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_P1_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_P1_MSB_REG);
dig_P1 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_P2_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_P2_MSB_REG);
dig_P2 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_P3_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_P3_MSB_REG);
dig_P3 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_P4_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_P4_MSB_REG);
dig_P4 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_P5_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_P5_MSB_REG);
dig_P5 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_P6_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_P6_MSB_REG);
dig_P6 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_P7_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_P7_MSB_REG);
dig_P7 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_P8_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_P8_MSB_REG);
dig_P8 = msb 《《 8 | lsb;
lsb = bmp280_read_register(I2cHandle, BMP280_DIG_P9_LSB_REG);
msb = bmp280_read_register(I2cHandle, BMP280_DIG_P9_MSB_REG);
dig_P9 = msb 《《 8 | lsb;
bmp280_reset(bmp280);
ctrlmeas_reg = bmp280-》t_oversampling 《《 5 | bmp280-》p_oversampling 《《 2 | bmp280-》mode;
config_reg = bmp280-》t_sb 《《 5 | bmp280-》filter_coefficient 《《 2;
bmp280_write_register(I2cHandle, BMP280_CTRLMEAS_REG, ctrlmeas_reg);
bmp280_write_register(I2cHandle, BMP280_CONFIG_REG, config_reg);
HAL_Delay(100);
return bmp280;
}
void bmp280_reset(struct bmp280 *bmp280)
{
bmp280_write_register(bmp280-》I2cHandle, BMP280_RESET_REG, BMP280_RESET_VALUE);
}
void bmp280_set_standby_time(struct bmp280 *bmp280, BMP280_T_SB t_standby)
{
uint8_t config_reg;
bmp280-》t_sb = t_standby;
config_reg = bmp280-》t_sb 《《 5 | bmp280-》filter_coefficient 《《 2;
bmp280_write_register(bmp280-》I2cHandle, BMP280_CONFIG_REG, config_reg);
}
void bmp280_set_work_mode(struct bmp280 *bmp280, BMP280_WORK_MODE mode)
{
uint8_t ctrlmeas_reg;
bmp280-》mode = mode;
ctrlmeas_reg = bmp280-》t_oversampling 《《 5 | bmp280-》p_oversampling 《《 2 | bmp280-》mode;
bmp280_write_register(bmp280-》I2cHandle, BMP280_CTRLMEAS_REG, ctrlmeas_reg);
}
void bmp280_set_temperature_oversampling_mode(struct bmp280 *bmp280, BMP280_T_OVERSAMPLING t_osl)
{
uint8_t ctrlmeas_reg;
bmp280-》t_oversampling = t_osl;
ctrlmeas_reg = bmp280-》t_oversampling 《《 5 | bmp280-》p_oversampling 《《 2 | bmp280-》mode;
bmp280_write_register(bmp280-》I2cHandle, BMP280_CTRLMEAS_REG, ctrlmeas_reg);
}
void bmp280_set_pressure_oversampling_mode(struct bmp280 *bmp280, BMP280_P_OVERSAMPLING p_osl)
{
uint8_t ctrlmeas_reg;
bmp280-》t_oversampling = p_osl;
ctrlmeas_reg = bmp280-》t_oversampling 《《 5 | bmp280-》p_oversampling 《《 2 | bmp280-》mode;
bmp280_write_register(bmp280-》I2cHandle, BMP280_CTRLMEAS_REG, ctrlmeas_reg);
}
void bmp280_set_filter_mode(struct bmp280 *bmp280, BMP280_FILTER_COEFFICIENT f_coefficient)
{
uint8_t config_reg;
bmp280-》filter_coefficient = f_coefficient;
config_reg = bmp280-》t_sb 《《 5 | bmp280-》filter_coefficient 《《 2;
bmp280_write_register(bmp280-》I2cHandle, BMP280_CONFIG_REG, config_reg);
}
/* Returns temperature in DegC, double precision. Output value of “51.23” equals 51.23 DegC. */
static double bmp280_compensate_temperature_double(struct bmp280 *bmp280, int32_t adc_T)
{
double var1, var2, temperature;
var1 = (((double) adc_T) / 16384.0 - ((double) dig_T1) / 1024.0)
* ((double) dig_T2);
var2 = ((((double) adc_T) / 131072.0 - ((double) dig_T1) / 8192.0)
* (((double) adc_T) / 131072.0 - ((double) dig_T1) / 8192.0))
* ((double) dig_T3);
bmp280-》t_fine = (int32_t) (var1 + var2);
temperature = (var1 + var2) / 5120.0;
return temperature;
}
/* Returns pressure in Pa as double. Output value of “96386.2” equals 96386.2 Pa = 963.862 hPa */
static double bmp280_compensate_pressure_double(struct bmp280 *bmp280, int32_t adc_P)
{
double var1, var2, pressure;
var1 = ((double) bmp280-》t_fine / 2.0) - 64000.0;
var2 = var1 * var1 * ((double) dig_P6) / 32768.0;
var2 = var2 + var1 * ((double) dig_P5) * 2.0;
var2 = (var2 / 4.0) + (((double) dig_P4) * 65536.0);
var1 = (((double) dig_P3) * var1 * var1 / 524288.0
+ ((double) dig_P2) * var1) / 524288.0;
var1 = (1.0 + var1 / 32768.0) * ((double) dig_P1);
if (var1 == 0.0) {
return 0; // avoid exception caused by division by zero
}
pressure = 1048576.0 - (double) adc_P;
pressure = (pressure - (var2 / 4096.0)) * 6250.0 / var1;
var1 = ((double) dig_P9) * pressure * pressure / 2147483648.0;
var2 = pressure * ((double) dig_P8) / 32768.0;
pressure = pressure + (var1 + var2 + ((double) dig_P7)) / 16.0;
return pressure;
}
#if 0
static int32_t bmp280_compensate_temperature_int32(struct bmp280 *bmp280, int32_t adc_T)
{
int32_t var1, var2, temperature;
var1 = ((((adc_T》》3) - ((int32_t)dig_T1《《1))) * ((int32_t)dig_T2)) 》》 11;
var2 = (((((adc_T》》4) - ((int32_t)dig_T1)) * ((adc_T》》4) - ((int32_t)dig_T1))) 》》 12) * ((int32_t)dig_T3)) 》》 14;
bmp280-》t_fine = var1 + var2;
temperature = (bmp280-》t_fine * 5 + 128) 》》 8;
return temperature;
}
static uint32_t bmp280_compensate_pressure_int64(struct bmp280 *bmp280, int32_t adc_P)
{
int64_t var1, var2, pressure;
var1 = ((int64_t)bmp280-》t_fine) - 128000;
var2 = var1 * var1 * (int64_t)dig_P6;
var2 = var2 + ((var1*(int64_t)dig_P5)《《17);
var2 = var2 + (((int64_t)dig_P4)《《35);
var1 = ((var1 * var1 * (int64_t)dig_P3)》》8) + ((var1 * (int64_t)dig_P2)《《12);
var1 = (((((int64_t)1)《《47)+var1))*((int64_t)dig_P1)》》33;
if (var1 == 0)
{
return 0; // avoid exception caused by division by zero
}
pressure = 1048576-adc_P;
pressure = (((pressure《《31)-var2)*3125)/var1;
var1 = (((int64_t)dig_P9) * (pressure》》13) * (pressure》》13)) 》》 25;
var2 = (((int64_t)dig_P8) * pressure) 》》 19;
pressure = ((pressure + var1 + var2) 》》 8) + (((int64_t)dig_P7)《《4);
return (uint32_t)pressure;
}
#endif
/* Returns temperature in DegC, double precision. Output value of “51.23” equals 51.23 DegC. */
double bmp280_get_temperature(struct bmp280 *bmp280)
{
uint8_t lsb, msb, xlsb;
int32_t adc_T;
double temperature;
xlsb = bmp280_read_register(bmp280-》I2cHandle, BMP280_TEMPERATURE_XLSB_REG);
lsb = bmp280_read_register(bmp280-》I2cHandle, BMP280_TEMPERATURE_LSB_REG);
msb = bmp280_read_register(bmp280-》I2cHandle, BMP280_TEMPERATURE_MSB_REG);
adc_T = (msb 《《 12) | (lsb 《《 4) | (xlsb 》》 4);
temperature = bmp280_compensate_temperature_double(bmp280, adc_T);
return temperature;
}
/* Returns pressure in Pa as double. Output value of “96386.2” equals 96386.2 Pa = 963.862 hPa */
double bmp280_get_pressure(struct bmp280 *bmp280)
{
uint8_t lsb, msb, xlsb;
int32_t adc_P;
double pressure;
xlsb = bmp280_read_register(bmp280-》I2cHandle, BMP280_PRESSURE_XLSB_REG);
lsb = bmp280_read_register(bmp280-》I2cHandle, BMP280_PRESSURE_LSB_REG);
msb = bmp280_read_register(bmp280-》I2cHandle, BMP280_PRESSURE_MSB_REG);
adc_P = (msb 《《 12) | (lsb 《《 4) | (xlsb 》》 4);
pressure = bmp280_compensate_pressure_double(bmp280, adc_P);
return pressure;
}
/**
* 仅在BMP280被设置为normal mode后,
* 可使用该接口直接读取温度和气压。
*/
void bmp280_get_temperature_and_pressure(struct bmp280 *bmp280, double *temperature, double *pressure)
{
*temperature = bmp280_get_temperature(bmp280);
*pressure = bmp280_get_pressure(bmp280);
}
/**
* 当BMP280被设置为forced mode后,
* 可使用该接口直接读取温度和气压。
*/
void bmp280_forced_mode_get_temperature_and_pressure(struct bmp280 *bmp280, double *temperature, double *pressure)
{
bmp280_set_work_mode(bmp280, BMP280_FORCED_MODE);
HAL_Delay(100);
bmp280_get_temperature_and_pressure(bmp280, temperature, pressure);
}
/**
* 此demo使用forced mode以1s为周期,
* 对温度和气压进行数据采集并打印。
*/
void bmp280_demo(I2C_HandleTypeDef I2cHandle, double *temperature, double *pressure)
{
struct bmp280 *bmp280;
bmp280 = bmp280_init(I2cHandle);
if(bmp280 != NULL) {
while(1) {
bmp280_forced_mode_get_temperature_and_pressure(bmp280, temperature, pressure);
printf(“temperature=%ld pressure=%ld ”, (int32_t)*temperature, (uint32_t)*pressure);
HAL_Delay(1000);
}
} else
printf(“create bmp280 error! ”);
}
2.头文件:
#ifndef __BMP280_H__
#define __BMP280_H__
#define BMP280_ADDRESS 0xEC
#define BMP280_RESET_VALUE 0xB6
/*calibration parameters */
#define BMP280_DIG_T1_LSB_REG 0x88
#define BMP280_DIG_T1_MSB_REG 0x89
#define BMP280_DIG_T2_LSB_REG 0x8A
#define BMP280_DIG_T2_MSB_REG 0x8B
#define BMP280_DIG_T3_LSB_REG 0x8C
#define BMP280_DIG_T3_MSB_REG 0x8D
#define BMP280_DIG_P1_LSB_REG 0x8E
#define BMP280_DIG_P1_MSB_REG 0x8F
#define BMP280_DIG_P2_LSB_REG 0x90
#define BMP280_DIG_P2_MSB_REG 0x91
#define BMP280_DIG_P3_LSB_REG 0x92
#define BMP280_DIG_P3_MSB_REG 0x93
#define BMP280_DIG_P4_LSB_REG 0x94
#define BMP280_DIG_P4_MSB_REG 0x95
#define BMP280_DIG_P5_LSB_REG 0x96
#define BMP280_DIG_P5_MSB_REG 0x97
#define BMP280_DIG_P6_LSB_REG 0x98
#define BMP280_DIG_P6_MSB_REG 0x99
#define BMP280_DIG_P7_LSB_REG 0x9A
#define BMP280_DIG_P7_MSB_REG 0x9B
#define BMP280_DIG_P8_LSB_REG 0x9C
#define BMP280_DIG_P8_MSB_REG 0x9D
#define BMP280_DIG_P9_LSB_REG 0x9E
#define BMP280_DIG_P9_MSB_REG 0x9F
#define BMP280_CHIPID_REG 0xD0 /*Chip ID Register */
#define BMP280_RESET_REG 0xE0 /*Softreset Register */
#define BMP280_STATUS_REG 0xF3 /*Status Register */
#define BMP280_CTRLMEAS_REG 0xF4 /*Ctrl Measure Register */
#define BMP280_CONFIG_REG 0xF5 /*Configuration Register */
#define BMP280_PRESSURE_MSB_REG 0xF7 /*Pressure MSB Register */
#define BMP280_PRESSURE_LSB_REG 0xF8 /*Pressure LSB Register */
#define BMP280_PRESSURE_XLSB_REG 0xF9 /*Pressure XLSB Register */
#define BMP280_TEMPERATURE_MSB_REG 0xFA /*Temperature MSB Reg */
#define BMP280_TEMPERATURE_LSB_REG 0xFB /*Temperature LSB Reg */
#define BMP280_TEMPERATURE_XLSB_REG 0xFC /*Temperature XLSB Reg */
/* 在foreced mode下,1s的采样周期,温度和气压使用最低的精度采集并且使用最小的滤波器系数,
* 数据的采集时间大概在6ms,平均功率为3.27uA。
* */
/* 在foreced mode下,1s的采样周期, 温度和气压使用最高的精度采集并且使用最大的滤波器系数,
* 数据的采集时间大概在70ms,平均功率为30uA。
* */
typedef enum {
BMP280_T_MODE_SKIP = 0x0, /*skipped*/
BMP280_T_MODE_1, /*x1*/
BMP280_T_MODE_2, /*x2*/
BMP280_T_MODE_3, /*x4*/
BMP280_T_MODE_4, /*x8*/
BMP280_T_MODE_5 /*x16*/
} BMP280_T_OVERSAMPLING;
typedef enum {
BMP280_SLEEP_MODE = 0x0,
BMP280_FORCED_MODE,
BMP280_NORMAL_MODE
} BMP280_WORK_MODE;
typedef enum {
BMP280_P_MODE_SKIP = 0x0, /*skipped*/
BMP280_P_MODE_1, /*x1*/
BMP280_P_MODE_2, /*x2*/
BMP280_P_MODE_3, /*x4*/
BMP280_P_MODE_4, /*x8*/
BMP280_P_MODE_5 /*x16*/
} BMP280_P_OVERSAMPLING;
typedef enum {
BMP280_FILTER_OFF = 0x0, /*filter off*/
BMP280_FILTER_MODE_1, /*0.223*ODR*/
BMP280_FILTER_MODE_2, /*0.092*ODR*/
BMP280_FILTER_MODE_3, /*0.042*ODR*/
BMP280_FILTER_MODE_4 /*0.021*ODR*/
} BMP280_FILTER_COEFFICIENT;
typedef enum {
BMP280_T_SB1 = 0x0, /*0.5ms*/
BMP280_T_SB2, /*62.5ms*/
BMP280_T_SB3, /*125ms*/
BMP280_T_SB4, /*250ms*/
BMP280_T_SB5, /*500ms*/
BMP280_T_SB6, /*1000ms*/
BMP280_T_SB7, /*2000ms*/
BMP280_T_SB8, /*4000ms*/
} BMP280_T_SB;
struct bmp280 {
I2C_HandleTypeDef I2cHandle;
/* T1~P9 为补偿系数 */
uint16_t T1;
int16_t T2;
int16_t T3;
uint16_t P1;
int16_t P2;
int16_t P3;
int16_t P4;
int16_t P5;
int16_t P6;
int16_t P7;
int16_t P8;
int16_t P9;
int32_t t_fine;
uint8_t t_sb;
uint8_t mode;
uint8_t t_oversampling;
uint8_t p_oversampling;
uint8_t filter_coefficient;
};
extern struct bmp280 *bmp280_init(I2C_HandleTypeDef I2cHandle);
extern void bmp280_reset(struct bmp280 *bmp280);
extern void bmp280_set_standby_time(struct bmp280 *bmp280, BMP280_T_SB t_standby);
extern void bmp280_set_work_mode(struct bmp280 *bmp280, BMP280_WORK_MODE mode);
extern void bmp280_set_temperature_oversampling_mode(struct bmp280 *bmp280, BMP280_T_OVERSAMPLING t_osl);
extern void bmp280_set_pressure_oversampling_mode(struct bmp280 *bmp280, BMP280_P_OVERSAMPLING p_osl);
extern void bmp280_set_filter_mode(struct bmp280 *bmp280, BMP280_FILTER_COEFFICIENT f_coefficient);
extern double bmp280_get_temperature(struct bmp280 *bmp280);
extern double bmp280_get_pressure(struct bmp280 *bmp280);
extern void bmp280_get_temperature_and_pressure(struct bmp280 *bmp280, double *temperature, double *pressure);
extern void bmp280_forced_mode_get_temperature_and_pressure(struct bmp280 *bmp280, double *temperature, double *pressure);
extern void bmp280_demo(I2C_HandleTypeDef I2cHandle, double *temperature, double *pressure);
#endif
3.主函数相关代码:
uint8_t bmp280_id = 0;
uint8_t ctr_reg = 0;
uint8_t status_reg = 0;
int32_t tem = 0;
uint32_t pressure = 0;
bmp280_id = bmp280_init(&I2cHandle);
if(bmp280_id == 0x58) {
bmp280_reset(&I2cHandle);
ctr_reg = bmp280_read_register(&I2cHandle, 0xF4);
printf(“ctr_reg1111===0x%x ”, ctr_reg);
bmp280_write_register(&I2cHandle, 0xF4, 0xFF);
bmp280_write_register(&I2cHandle, 0xF5, 0x14);
HAL_Delay(100);
while(1) {
ctr_reg = bmp280_read_register(&I2cHandle, 0xF4);
printf(“ctr_reg2222===0x%x ”, ctr_reg);
status_reg = bmp280_read_register(&I2cHandle, 0xF3);
printf(“status == 0x%x ”, status_reg);
tem = bmp280_get_temperature(&I2cHandle);
pressure = bmp280_get_pressure(&I2cHandle);
printf(“bmp280_id = 0x%x tem=%ld pressure=%ld ”, bmp280_id, tem, pressure/256);
HAL_Delay(2000);
}
}
-
【核桃派ZeroW开发板体验连载】小小气象站 03 aht10、bmp280测试2024-08-10 1504
-
【TI SimpleLink SensorTag试用体验】8.数字气压计BMP2802016-05-15 13384
-
ARM®mbed OS入门开发(五A)通过SPI与BMP280通信(mbed应用)2016-10-10 4769
-
BMP280该怎样去使用呢2022-01-06 1776
-
基于STM32/51与BMP280模块的K026测试2022-02-18 1676
-
让BMP280温度和压力传感器在NodeMCU ESP8266板上工作,无法从BMP280获得任何输出是怎么回事?2023-05-30 894
-
BOSCH气压传感器BMP280数据手册2016-01-19 7463
-
STM32F2—通信接口I2C2017-09-03 1887
-
气压传感器bmp280与ms5611哪个好2018-03-08 27555
-
博世大气压计BME280和BMP280资源下载2021-04-25 1594
-
K026 基于STM32/51 BMP280模块测试 串口打印温度与气压值2021-12-23 1552
-
使用BMP280测量温度、压力和高度2022-10-26 1673
-
Kniwwelino通过I2C控制BME2802023-01-04 703
-
BMP280气压传感器使用指南2023-04-17 19513
-
bmp280气压传感器模块例程2023-12-18 4287
全部0条评论

快来发表一下你的评论吧 !
