

STM32+MS5611测气压温度例程详解
嵌入式设计应用
描述
一、基础知识
首先,MS5611是什么
MS5611气压传感器是由MEAS(瑞士)推出的一款SPI和I²C总线接口的新一代高分辨率气压传感器,分辨率可达到10cm。该传感器模块包括一个高线性度的压力传感器和一个超低功耗的24位Σ模数转换器(工厂校准系数)。
计算温度:
D2 = MS5611_DO_Conversion(OSR_Temp);
delay_ms(10);
dT = D2 - (((u32)c5)*256) ;
Temperature = 2000 + dT*((float)c6)/8388608 ;
计算大气压:
D1 = MS5611_DO_Conversion(OSR_Pressure) ;
delay_ms(10) ;
OFF = (((int64_t)c2)*65536 + (((int64_t)c4*dT)/128)) ;
SENS = (((int64_t)c1)*32768) + (((int64_t)c3*dT)/256) ;
if(Temperature 《 2000) //µ±Î¶ÈÖµTEMPСÓÚ2000ʱÐèÒª×öζȲ¹³¥
{
T2 = (float)(dT*dT)/0x80000000 ;
Aux = (Temperature - 2000)*(Temperature - 2000) ;
OFF2 = 2.5f*Aux ;
SENS2 = 1.25f*Aux ;
if(Temperature 《 -1500) //µ±Î¶ÈÖµTEMPСÓÚ-1500ʱÐèÒª×öζȲ¹³¥
{
Aux = (Temperature+1500)*(Temperature+1500);
OFF2 = OFF2 + 7*Aux;
SENS2 = SENS2 + 5.5f*Aux;
}
}
else
{
T2 = 0 ;
OFF2 = 0 ;
SENS2= 0 ;
}
Temperature = Temperature - T2 ;
OFF = OFF - OFF2 ;
SENS = SENS - SENS2 ;
Pressure = ((D1*SENS)/2097152 - OFF)/32768 ;
海拔计算:
Altitude = (44330.0f*(1.0f - pow((float)Pressure/101325.0f, 0.190295f))) ;
MS5611主要用于智能手机、海拔高度测量和导航辅助,做四轴的朋友一般都了解。
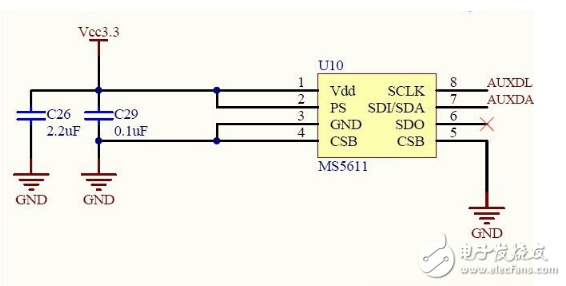
其次,对于飞行器的姿态控制,我们使用GY-86 10DOF 的模块,里面带有MS5611 + MPU6050 + HMC5883,通过IIC协议读取数据进行操作。MS5611挂在MPU5060的从I2C接口上。MS5611的I2C地址为0b111011Cx,其中C比特位由CSB引脚决定,为CSB引脚的补码值(取反)。GY-86上 MS5611的CSB引脚接地,所以CSB引脚值为0,8位I2C地址为0b1110111x(0xEE),7位I2C地址为 0b1110111(0x77)。
这里,0b表示二进制,0x表示十六进制,数字前加0表示八进制。例如:
‘\077’ //是8进制表示‘ ’,0可以省略,因为C,C++规定不允许使用斜杠加10进制数来表示字符;
‘\0x3F’ //是16进制表示。这些都是C语言中的基础
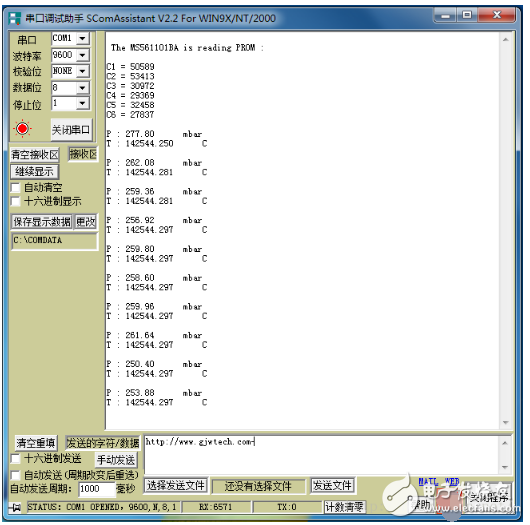
二、运行结果
三、相应模块
程序涉及的模块有:
RCC:复位及时钟控制模块,用于初始化STM32 USART外设时钟及IO口复用时钟;
IIC:模拟IIC 协议,好多人都说STM32的硬件IIC模块用不了,主要是因为STM32 的硬件 IIC 模块有个天生的 BUG,就是不能被中断,也就是IIC要处于中断的最高级,ST在自己后来的 DataSheet 中已经证实了这一点。
Delay:利用系统时钟SysTick,也号称“滴答”,写的延时模块;
USART:串口模块;
MS5611:MS5611模块配置。
四:代码
RCC
#include “Rcc.h”
void RCC_Init(void)
{
ErrorStatus HSEStartUpStatus;
//定义枚举类型错误状态变量
RCC_DeInit();//复位系统时钟设置
RCC_HSEConfig(RCC_HSE_ON);
//打开外部高速时钟晶振,使能HSE
/*RCC_HSE_ON 开
_off 关 _bypass hse晶振被外部时钟旁路*/
HSEStartUpStatus = RCC_WaitForHSEStartUp();
/*RCC_WaitForHSEStartUp()返回一个ErrorStatus枚举值,
success好,error未好*/
if(HSEStartUpStatus == SUCCESS)//HES就绪
{
RCC_HCLKConfig(RCC_SYSCLK_Div1);
//AHB时钟(HCLK)=系统时钟
RCC_PCLK1Config(RCC_HCLK_Div2);
//设置低速AHB时钟(APB1)为HCLK的2分频
RCC_PCLK2Config(RCC_HCLK_Div1);
//设置高速AHB时钟(APB2)=HCLK时钟
FLASH_SetLatency(FLASH_Latency_2);
//设置FLASH延时周期数为2
//使能领取指缓存
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
//设置PLL时钟源及倍频系数,为HSE的9倍频 8MHz * 9 = 72MHz
/*void RCC_PLLConfig(u32 RCC_PLLSource, u32 RCC_PLLMul)
RCC_PLLSource_HSI_Div2 pll输入时钟=hsi/2;
RCC_PLLSource_HSE_Div1 pll输入时钟 =hse
RCC_PLLSource_HSE_Div2 pll输入时钟=hse/2
RCC_PLLMul_2 ------_16 pll输入时钟*2---16
pll输出时钟不得超过72MHZ*/
RCC_PLLCmd(ENABLE);
//ENABLE / DISABLE
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);//等待PLL输出稳定
/*FlagStatus RCC_GetFlagStatus(u8 RCC_FLAG) 检查指定RCC标志位
返回SET OR RESET
RCC_FLAG_HSIRDY HSI晶振就绪
RCC_FLAG_HSERDY
RCC_FLAG_PLLRDY
RCC_FLAG_LSERDY
RCC_FLAG_LSIRDY.。。。。。.*/
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
//设置PLL为系统时钟源
/*void RCC_SYSCLKConfig(u32 RCC_SYSCLKSource) 设置系统时钟
RCC_SYSCLKSource_HSI
RCC_SYSCLKSource_HSE
RCC_SYSCLKSource_PLLCLK 选HSI HSE PLL 作为系统时钟*/
while(RCC_GetSYSCLKSource() != 0x08);
//判断PLL是否是系统时钟
/*u8 RCC_GetSYSCLKSource(void) 返回用作系统时钟的时钟源
0x00:HSI 0x04:HSE 0x08:PLL */
}
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |
RCC_APB2Periph_AFIO |
RCC_APB2Periph_GPIOB , ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//U2 U3 时钟在APB1
//打开GPIO时钟,复用功能,串口1的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1时钟
//好奇怪,是因为官方的库函数更新?
//不是说F10X系列只有一个CAN,而F4有CAN1 CAN2 吗?
//怎么他的系统配置文件里面是can1?????
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //时钟使能
/*void RCC_APB2PeriphClockCmd(u32 RCC_APB2Periph, FunctionalState NewState)
enable 或 disable apb2 外设时钟
RCC_APB2Periph_AFIO 功能复用IO 时钟
RCC_APB2Periph_GPIOA/B/C/D/E GPIOA/B/C/D/E 时钟
RCC_APB2Periph_ADC1/ADC2 ADC1/2 时钟
RCC_APB2Periph_TIM1
RCC_APB2Periph_SPI1
RCC_APB2Periph_USART1
RCC_APB2Periph_ALL 全部APB2外设时钟*/
}
IIC
#include “myIIC.h”
unsigned char I2C_ReadByte(unsigned char DeviceAddr,unsigned char address); //从24c02的地址address中读取一个字节数据
void I2C_WriteByte(unsigned char DeviceAddr,unsigned char address,unsigned char info);
void I2C_NoAddr_WriteByte(unsigned char DeviceAddr,unsigned char info);
void I2C_Read_MultiBytes(unsigned char DeviceAddr,unsigned char address,unsigned char BytesNum,unsigned char * OutDate );
uint16_t I2C_Read_2Bytes(unsigned char DeviceAddr,unsigned char address);
uint32_t I2C_Read_3Bytes(unsigned char DeviceAddr,unsigned char address);
void delay_nop(void);
void delay2(unsigned int x);
void iic_start(void);
void iic_stop(void);
void iic_writex(unsigned char j);
unsigned char iic_readx(void);
void iic_check_ACK(void);
void iic_SDA_Set_Dir(unsigned char io_set);
void I2C_GPIO_Configuration(void);
void delay2(unsigned int x)
{
unsigned int i;
for(i=0;i《x;i++);
}
void delay_nop(void)
{
unsigned int i=10; //i=10延时1.5us//这里可以优化速度 ,经测试最低到5还能写入
while(i--);
}
void iic_start(void)
{
//SDA=1;
GPIO_SetBits(GPIOB,SDA);
delay_nop();
//SCL=1;
GPIO_SetBits(GPIOB,SCL);
delay_nop();
//SDA=0;
GPIO_ResetBits(GPIOB, SDA);
delay_nop();
//SCL=0;
GPIO_ResetBits(GPIOB, SCL);
delay_nop();
}
void iic_stop(void)
{
//SDA=0;
GPIO_ResetBits(GPIOB, SDA);
delay_nop();
//SCL=1;
GPIO_SetBits(GPIOB,SCL);
delay_nop();
//SDA=1;
GPIO_SetBits(GPIOB,SDA);
delay_nop();
}
void iic_writex(unsigned char j)
{
unsigned char i,temp,temp1;
temp=j;
//iic_SDA_Set_Dir(0);
for (i=0;i《8;i++)
{
temp1=temp & 0x80;
temp=temp《《1;
//SCL=0;
GPIO_ResetBits(GPIOB, SCL);
delay_nop();
//SDA=CY;
if(temp1==0x80)
{GPIO_SetBits(GPIOB, SDA);}
else
{GPIO_ResetBits(GPIOB, SDA);}
delay_nop();
// SCL=1;
GPIO_SetBits(GPIOB,SCL);
delay_nop();
}
//iic_SDA_Set_Dir(0);
//SCL=0;
GPIO_ResetBits(GPIOB, SCL);
delay_nop();
//SDA=1;
GPIO_SetBits(GPIOB,SDA);
delay_nop();
}
unsigned char iic_readx(void)
{
unsigned char i,j,k=0;
//SCL=0;
GPIO_ResetBits(GPIOB, SCL);
delay_nop();
//SDA=1;
GPIO_SetBits(GPIOB,SDA);
iic_SDA_Set_Dir(1);
for (i=0;i《8;i++)
{
delay_nop();
//SCL=1;
GPIO_SetBits(GPIOB,SCL);
delay_nop();
//if (SDA==1) j=1;
if( GPIO_ReadInputDataBit(GPIOB,SDA)==1 )
{j=1;}
else
{j=0;}
k=(k《《1)|j;
//SCL=0;
GPIO_ResetBits(GPIOB, SCL);
}
iic_SDA_Set_Dir(0);
delay_nop();
return(k);
}
void iic_check_ACK(void)//检测从机应答信号
{
unsigned int i=0;
iic_SDA_Set_Dir(1);
//SCL=1;
GPIO_SetBits(GPIOB,SCL);
delay_nop();
while ((GPIO_ReadInputDataBit(GPIOB,SDA)==1)&&(i《5000))i++;
//SCL=0;
GPIO_ResetBits(GPIOB, SCL);
delay_nop();
iic_SDA_Set_Dir(0);
}
void I2C_Ack(void)
{
GPIO_ResetBits(GPIOB,SCL);
delay_nop();
GPIO_ResetBits(GPIOB,SDA);
delay_nop();
GPIO_SetBits(GPIOB,SCL);
delay_nop();
GPIO_ResetBits(GPIOB,SCL);
delay_nop();
}
void I2C_NoAck(void)
{
GPIO_ResetBits(GPIOB,SCL);
delay_nop();
GPIO_SetBits(GPIOB,SDA);
delay_nop();
GPIO_SetBits(GPIOB,SCL);
delay_nop();
GPIO_ResetBits(GPIOB,SCL);
delay_nop();
}
unsigned char I2C_ReadByte(unsigned char DeviceAddr,unsigned char address)
{
unsigned char i;
iic_start();
iic_writex(DeviceAddr);
iic_check_ACK();
iic_writex(address);
iic_check_ACK();
iic_start();
iic_writex(DeviceAddr+1);
iic_check_ACK();
i=iic_readx();
iic_stop();
//delay2(10);
delay2(50);
return(i);
}
void I2C_WriteByte(unsigned char DeviceAddr,unsigned char address,unsigned char info)
{
iic_start();
iic_writex(DeviceAddr);
iic_check_ACK();
iic_writex(address);
iic_check_ACK();
iic_writex(info);
iic_check_ACK();
iic_stop();
//delay2(50);
delay2(250);
}
void I2C_NoAddr_WriteByte(unsigned char DeviceAddr,unsigned char info)
{
iic_start();
iic_writex(DeviceAddr);
iic_check_ACK();
iic_writex(info);
iic_check_ACK();
iic_stop();
//delay2(50);
delay2(250);
}
void I2C_Read_MultiBytes(unsigned char DeviceAddr,unsigned char address,unsigned char BytesNum,unsigned char * OutDate )
{
unsigned char i;
iic_start();
iic_writex(DeviceAddr);
iic_check_ACK();
iic_writex(address);
iic_check_ACK();
iic_start();
iic_writex(DeviceAddr+1);
iic_check_ACK();
for(i=0;i《BytesNum;i++)
{
OutDate[i]=iic_readx();
if(i+1《BytesNum) I2C_Ack();else I2C_NoAck();//最后一个字节无需应答
}
iic_stop();
delay2(250);
}
uint16_t I2C_Read_2Bytes(unsigned char DeviceAddr,unsigned char address)
{
unsigned char i,data_temp1,data_temp2;
uint16_t data16;
iic_start();
iic_writex(DeviceAddr);
iic_check_ACK();
iic_writex(address);
iic_check_ACK();
iic_start();
iic_writex(DeviceAddr+1);
iic_check_ACK();
data_temp1=iic_readx();
I2C_Ack();
data_temp2=iic_readx();
I2C_NoAck();//最后一个字节无需应答
iic_stop();
//delay2(10);
delay2(250);
data16=(data_temp1《《8)|data_temp2;
return data16;}
uint32_t I2C_Read_3Bytes(unsigned char DeviceAddr,unsigned char address)
{
unsigned char i,data_temp1,data_temp2,data_temp3;
uint32_t data32;
iic_start();
iic_writex(DeviceAddr);
iic_check_ACK();
iic_writex(address);
iic_check_ACK();
iic_start();
iic_writex(DeviceAddr+1);
iic_check_ACK();
data_temp1=iic_readx();
I2C_Ack();
data_temp2=iic_readx();
I2C_Ack();
data_temp3=iic_readx();
I2C_NoAck();//最后一个字节无需应答
iic_stop();
//delay2(10);
delay2(250);
data32=data_temp1*65535+data_temp2*256+data_temp3;
return data32;}
void I2C_GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB , ENABLE);
GPIO_InitStructure.GPIO_Pin = SCL; //24C02 SCL
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = SDA; //24C02 SDA 作为输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
void iic_SDA_Set_Dir(unsigned char io_set) //SDA引脚输入输出设置
{
GPIO_InitTypeDef GPIO_InitStructure;
if(io_set==0)
{
GPIO_InitStructure.GPIO_Pin = SDA; //24C02 SDA 作为输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
else if(io_set==1)
{
GPIO_InitStructure.GPIO_Pin = SDA; //24C02 SDA 作为输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
else
{;}
}
DELAY
#include “delay.h”
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数,在ucos下,代表每个节拍的ms数
//初始化延迟函数
//SYSTICK的时钟固定为HCLK时钟的1/8
//SYSCLK:系统时钟
void delay_init()
{
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //选择外部时钟 HCLK/8
fac_us=SystemCoreClock/8000000; //为系统时钟的1/8
fac_ms=(u16)fac_us*1000; //非OS下,代表每个ms需要的systick时钟数
}
//延时nus
//nus为要延时的us数。
void delay_us(u32 nus)
{
u32 temp;
SysTick-》LOAD=nus*fac_us; //时间加载
SysTick-》VAL=0x00; //清空计数器
SysTick-》CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do
{
temp=SysTick-》CTRL;
}while((temp&0x01)&&!(temp&(1《《16))); //等待时间到达
SysTick-》CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick-》VAL =0X00; //清空计数器
}
//延时nms
//注意nms的范围
//SysTick-》LOAD为24位寄存器,所以,最大延时为:
//nms《=0xffffff*8*1000/SYSCLK
//SYSCLK单位为Hz,nms单位为ms
//对72M条件下,nms《=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick-》LOAD=(u32)nms*fac_ms; //时间加载(SysTick-》LOAD为24bit)
SysTick-》VAL =0x00; //清空计数器
SysTick-》CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do
{
temp=SysTick-》CTRL;
}while((temp&0x01)&&!(temp&(1《《16))); //等待时间到达
SysTick-》CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick-》VAL =0X00; //清空计数器
}
MS5611
#include “MS5611.h”
/*宏定义------------------------------------------------------------------*/
//定义器件在IIC总线中的从地址,根据CSB引脚不同修改
//#define MS561101BA_ADDR 0xec //CBR=1 0x76 I2C address when CSB is connected to HIGH (VCC)
#define MS561101BA_ADDR 0xee //CBR=0 0x77 I2C address when CSB is connected to LOW (GND)
// 定义MS561101BA内部地址
// registers of the device
#define MS561101BA_D1 0x40
#define MS561101BA_D2 0x50
#define MS561101BA_RESET 0x1E
// D1 and D2 result size (bytes)
#define MS561101BA_D1D2_SIZE 3
// OSR (Over Sampling Ratio) constants
#define MS561101BA_OSR_256 0x00
#define MS561101BA_OSR_512 0x02
#define MS561101BA_OSR_1024 0x04
#define MS561101BA_OSR_2048 0x06
#define MS561101BA_OSR_4096 0x08
//#define MS561101BA_D1_OSR_256 0x40
//#define MS561101BA_D1_OSR_512 0x42
//#define MS561101BA_D1_OSR_1024 0x44
//#define MS561101BA_D1_OSR_2048 0x46
#define MS561101BA_D1_OSR_4096 0x48
//#define MS561101BA_D2_OSR_256 0x50
//#define MS561101BA_D2_OSR_512 0x52
//#define MS561101BA_D2_OSR_1024 0x54
//#define MS561101BA_D2_OSR_2048 0x56
#define MS561101BA_D2_OSR_4096 0x58
#define MS561101BA_PROM_BASE_ADDR 0xA0 // by adding ints from 0 to 6 we can read all the prom configuration values.
// C1 will be at 0xA2 and all the subsequent are multiples of 2
#define MS561101BA_PROM_REG_COUNT 6 // number of registers in the PROM
#define MS561101BA_PROM_REG_SIZE 2 // size in bytes of a prom registry.
/*变量声明----------------------------------------------------------------*/
uint16_t Cal_C[7]; //用于存放PROM中的6组数据
uint32_t D1_Pres,D2_Temp; // 存放数字压力和温度
float Pressure; //温度补偿大气压
float dT,Temperature,Temperature2;//实际和参考温度之间的差异,实际温度,中间值
double OFF,SENS; //实际温度抵消,实际温度灵敏度
float Aux,OFF2,SENS2; //温度校验值
uint32_t ex_Pressure; //串口读数转换值
uint8_t exchange_num[8];
/*函数声明----------------------------------------------------------------*/
void MS561101BA_Reset(void);
void MS561101BA_readPROM(void);
uint32_t MS561101BA_DO_CONVERSION(u8 command);
void MS561101BA_GetTemperature(u8 OSR_Temp);
void MS561101BA_GetPressure(u8 OSR_Pres);
void MS561101BA_Init(void);
void SampleANDExchange(void);
/************************************************************
* 函数名:MS561101BA_Reset
* 描述 : 复位
* 输入 :无
* 输出 :无
*/
void MS561101BA_Reset(void)
{
I2C_NoAddr_WriteByte(MS561101BA_ADDR,MS561101BA_RESET);
}
/************************************************************
* 函数名:MS561101BA_readPROM
* 描述 : 从PROM读取出厂校准数据
* 输入 :无
* 输出 :无
*/
void MS561101BA_readPROM(void)
{ uint16_t value=0;u8 temp1[2]={0};
u8 i;
for (i=0;i《=MS561101BA_PROM_REG_COUNT;i++)
{
// I2C_Read_MultiBytes(MS561101BA_ADDR,MS561101BA_PROM_BASE_ADDR + (i * MS561101BA_PROM_REG_SIZE),2,temp1);
//value=temp1[0]《《8|temp1[1];
//Cal_C[i]=value;
Cal_C[i]=I2C_Read_2Bytes(MS561101BA_ADDR,MS561101BA_PROM_BASE_ADDR + (i * MS561101BA_PROM_REG_SIZE));
}
printf(“\n The MS561101BA is reading PROM : \r\n”);
printf(“\r\nC1 = %d\r\nC2 = %d\r\nC3 = %d\r\nC4 = %d\r\nC5 = %d\r\nC6 = %d\r\n”,Cal_C[1],Cal_C[2],Cal_C[3],Cal_C[4],Cal_C[5],Cal_C[6]);
}
/************************************************************
* 函数名:MS561101BA_DO_CONVERSION
* 描述 :
* 输入 :无
* 输出 :无
*/
uint32_t MS561101BA_DO_CONVERSION(uint8_t command)
{
uint32_t conversion;
I2C_NoAddr_WriteByte(MS561101BA_ADDR,command);
delay_ms(10);//延时,去掉数据错误
conversion=I2C_Read_3Bytes(MS561101BA_ADDR,0);
return conversion;
}
/************************************************************
* 函数名:MS561101BA_GetTemperature
* 描述 : 读取数字温度
* 输入 :过采样率
* 输出 :无
*/
void MS561101BA_GetTemperature(u8 OSR_Temp)
{
D2_Temp= MS561101BA_DO_CONVERSION(OSR_Temp);
delay_ms(100);
dT=D2_Temp - (((uint32_t)Cal_C[5])《《8);
Temperature=2000+dT*((uint32_t)Cal_C[6])/8388608; //算出温度值的100倍,2001表示20.01°
}
/************************************************************
* 函数名:MS561101BA_GetPressure
* 描述 : 读取数字气压
* 输入 :过采样率
* 输出 :无
*/
void MS561101BA_GetPressure(u8 OSR_Pres)
{
D1_Pres= MS561101BA_DO_CONVERSION(OSR_Pres);
delay_ms(100);
OFF=(uint32_t)(Cal_C[2]《《16)+((uint32_t)Cal_C[4]*dT)/128.0;
SENS=(uint32_t)(Cal_C[1]《《15)+((uint32_t)Cal_C[3]*dT)/256.0;
//温度补偿
if(Temperature 《 2000)// second order temperature compensation when under 20 degrees C
{
Temperature2 = (dT*dT) / 0x80000000;
Aux = (Temperature-2000)*(Temperature-2000);
OFF2 = 2.5*Aux;
SENS2 = 1.25*Aux;
if(Temperature 《 -1500)
{
Aux = (Temperature+1500)*(Temperature+1500);
OFF2 = OFF2 + 7*Aux;
SENS2 = SENS + 5.5*Aux;
}
}else //(Temperature 》 2000)
{
Temperature2 = 0;
OFF2 = 0;
SENS2 = 0;
}
Temperature = Temperature - Temperature2;
OFF = OFF - OFF2;
SENS = SENS - SENS2;
Pressure=(D1_Pres*SENS/2097152.0-OFF)/32768.0;
}
/************************************************************
* 函数名:MS561101BA_Init
* 描述 : MS561101BA初始化
* 输入 :无
* 输出 :无
*/
void MS561101BA_Init(void)
{
MS561101BA_Reset();
delay_ms(100);
MS561101BA_readPROM();
delay_ms(100);
}
/************************************************************
* 函数名:SampleANDExchange
* 描述 : 读取数据并转换串口发送
* 输入 :无
* 输出 :无
*/
void SampleANDExchange(void)
{
uint8_t i=0;
MS561101BA_GetTemperature(MS561101BA_D2_OSR_4096);//0x58
MS561101BA_GetPressure(MS561101BA_D1_OSR_4096); //0x48
ex_Pressure=(long)(Pressure);
if(Pressure《0)
{
ex_Pressure=-ex_Pressure;
exchange_num[0]=‘-’;
}
else exchange_num[0]=‘\0’;
exchange_num[1]=ex_Pressure/100000+0x30;
ex_Pressure=ex_Pressure%100000;
exchange_num[2]=ex_Pressure/10000+0x30;
ex_Pressure=ex_Pressure%10000;
exchange_num[3]=ex_Pressure/1000+0x30;
ex_Pressure=ex_Pressure%1000;
exchange_num[4]=ex_Pressure/100+0x30;
ex_Pressure=ex_Pressure%100;
exchange_num[5]=‘。’;
exchange_num[6]=ex_Pressure/10+0x30;
ex_Pressure=ex_Pressure%10;
exchange_num[7]=ex_Pressure+0x30;
printf(“\nP : %c%c%c%c%c%c%c%c mbar \r\n”,exchange_num[0],exchange_num[1],exchange_num[2],exchange_num[3],exchange_num[4],exchange_num[5],exchange_num[6],exchange_num[7]);
// for(i=0;i《8;i++)
// {
// printf(“%c”,exchange_num[i]);
// }
// printf(“ mbar \r\n”);
printf(“T : %4.3f °C\r\n ”,Temperature/100);
}
-
基于STM32F103驱动MS5611读取气压与温度数据2026-05-30 4729
-
气压计MS5611读出来的数据不准是为什么?2023-11-02 535
-
MS5607与MS5611气压传感器怎么选择2023-05-09 2085
-
STM32F0+MPU9250(with MS5611)的姿态解析算法移植(MahonyAHRS)2021-12-06 899
-
使用stm32的IIC库函数开发MS5611气压计2021-11-23 1815
-
MS5611气压计 I2C驱动代码 STM322021-11-15 1154
-
stm32f407使用SPI读取气压计MS5611的数据2021-08-17 2056
-
MS5611气压计读取气压值总是跳变2018-10-24 4466
-
气压传感器bmp280与ms5611哪个好2018-03-08 27557
-
气压传感器MS5611使用SPI接口的程序2018-01-12 13473
-
STM32F10X + MS5611 + JLink 测气压温度例程详解2017-08-18 4345
-
【经验交流】使用MS5611高精度气压计之后的感想2015-02-06 33810
全部0条评论

快来发表一下你的评论吧 !
