

京准科技:PTP网络时钟服务器过5跳交换数据测试
描述
京准科技:PTP网络时钟服务器过5跳交换数据测试
京准科技:PTP网络时钟服务器过5跳交换数据测试
京准电子官微——ahjzsz
一、IEEE1588PTPv2 授时技术简介
IEEE1588 协议的全称是“网络测量和控制系统的精密时钟同步协议标准”,是通用的提升网络系统定时同步能力的规范,是一个允许通信网络中的多个节点通过时钟报文的传播,从而达到与连在同一个网络中的主时钟参考达到精确同步的协议, 其特点为 :一个与介质无关 的协议,可实现有 线,无线,以太网, IP网,光网络的节点时钟同步。
IEEE1588 的基本构思是通过硬件和软件将网络设备(客户机)的内时钟与一个主时钟实 现精确时间同 步,目标 同步误差为微妙(μs) 级别的运用 ,与 NTP协议的 1000μs 精度相比,整个网络的定时同步指标有显著的改善。
IEEE1588 协议目前已发展到 v2 版本。1588v2 对 v1 进行了完善,进一步提高了同步的精度;引入透明时钟 TC 模式,包括 E2E 透明时钟和 P2P 透明时钟,计算中间网络设备引入的驻留时间,从而实现主从间精确时间同步,并新增端口间延时测量机制等,通过非对称校正减少了大型网络拓扑中的积聚错误。
在良好的网络环境下,IEEE1588v2 能达到 100 纳秒(ns) 的时钟同步精度。
IEEE1588v2的高精 度使得它被越来 越多地用作 普通时钟通过 网络远程实现 对高精度时钟的频率和相位锁定的协议。
相对于现有的授时技术(如原子钟, GPS, 北斗或 IRIG), IEEE1588v2授时系统的优点是:
o 不受地形限制:
1588v2时钟同步网络中只要保障时间源 (主时钟) 的设置不受地形影响,各从时钟 通过网络锁定主时钟,不受其所处的地形/位置或者卫星可见度的影响。
o 成本低:
只需要一个高精度的主时钟,以及连接在各个设备/终端的低成本从时钟,即可实现对整个网络的精确时钟同步。
o 覆盖面广:
整个IEEE1588v2 精确时钟分布网络的覆盖面可以随着其承载网络的扩展而扩展。通过一个 2 层或 3 层网络,一个主时钟理论上可以同步上千个从时钟。
o 综合成本低:
可重用现有的广域(IP)或局域网络 (Ethernet)作为承载, 大大降低了网络建设成本,并缩短了系统实施周期。
二、IEEE1588PTPv2 的工作原理
图一中展示了一个从时钟基于 IEEE1588v2 通过网络锁定高精度主时钟的原理:这个时钟同步网络包括一个支持 IEEE1588v2 协议的高精度主时钟,一个或多个精度较低的从时钟,以及连接这两个时钟以太网或 IP 网络。 主时钟与从时钟按1588v2 规定的流程进行频繁的消息交换. 为了让从时钟测量出相对 主时钟的时间漂移,主从时间之间信息交互的流程如下:
1) 主时钟发送一个 Sync 消息到从时钟并通过一个高精度的时间戳记录下
了这个消息的发送时刻 t1。
2) 从时钟收到Sync消息之后纪录下接收时间戳 t2.
3) 主时钟接着将时间戳 t1放在一个Follow_Up消息中并传给从时钟。
4) 从时钟接受Follow_Up 消息
5) 从时钟发送一个 Delay_Req 消息到主时钟,并利用一个高精度时间戳记录
下发送时间 t3
6) 主时钟接收 Delay_Req 消息 并记下接收时间 t4.
7) 主时钟将时间戳t4 放在一个 Delay_Resp 消息中传给从时钟。
主时钟为每一个从时钟的消息交互分别一个会话。以上消息交互过程在主从时钟
之间进行周期性的重复,帮助从时钟维护对主时钟的时间同步并不断的尝试提高精度。
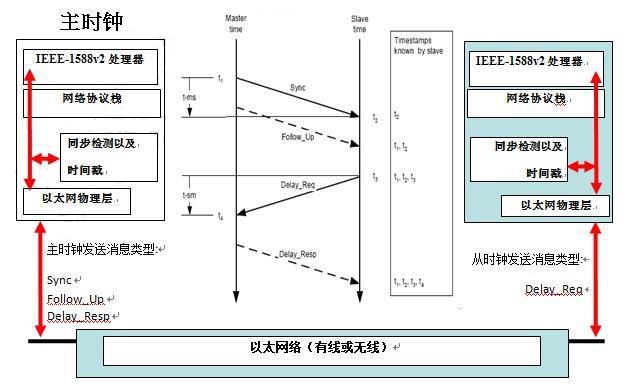
在上述消息交互之后, 从时钟将 得到t1 – t4 四个相关的时间 戳. 这些时间戳将被用来 计算从主 从时钟间 的平均消息 传输时间 以及从时 钟相对于主 时钟的时间漂移。从时间戳 t1 – t4 计算出主从时钟间的平均消息传输时间以及时间漂移过程如下:
t2-t1= Clock_Offset+ T_MS (1)
t4-t3= - Clock_Offset+ T_SM (2)
其中:
Clock_Offset 代表从时钟相对于主时钟的时间误差
T_MS 代表主时钟往从时钟的传输路径时延
T_SM 代表从时钟往主时钟的传输路径时延
如果主从时钟间上下行传输路径时延对称,即 T_MS = T_SM , 主从时间误差可估算为:
Clock_Offset = [(t2-t1)-(t4-t3)]/2 (3)
上行或下行传输路径时延按下式估算:
T_MS = T_SM = [(t2-t1)+(t4-t3)]/2 (4)
如果主从时钟间上下行传输路径时延是非对称的,按上述方法估算的主从时间漂移以及传输路径时延将会存在误差. 假设原本对称的上下行传 输时延现分别存在记为 e_ms, e_sm 的时延修正变量 (通常为正数)。表达式(1) 和 (2) 可改写为:
t2-t1= Clock_Offset + T_MS + e_ms (5)
t4-t3= - Clock_Offset + T_SM + e_sm (6)
主从时间漂移可估算成:
Clock_Offset = [(t2-t1)-(t4-t3)]/2 – (e_ms-e_sm)/2 (7)
上或下行传输路径时延按下式估算:
T_MS = T_SM = [(t2-t1)+(t4-t3)]/2 + (e_ms+e_sm)/2 (8)
由(7)式可以看出,影响 IEEE1588v2 时钟同步方法的精度的主要因素并不是上行或下行传输时延的误差(或修正变量)的绝对值,而是上下行传输时延误差间的相对值。或者说在一个传输时延误差很大的环境里,只要保证上下行传输时延误差对称,IEEE1588v2 时钟同步仍然可以达到一个很高的精度。
从时钟可以根据估算得到的本地时钟相对于主时钟的时间漂移对本地时钟进行校正,从而达到主从时钟同步. 为了使从时钟的时间同步达到很 高的精度,从时钟的 IEEE1588v2同步算法必须对上下行的传输时延差别,抖动以及其它可能引入误差的因素进行补偿。
测试设备
我们搭建了一个千兆(普通交换机)以太网以进行我司 PTP 时钟产品的功能,同步精度的测试。该网络的的基本拓扑框图如下图所示 (以五跳局域网为例 )。
测试方案实施
具体测试方案实施包括以下要点:
§ 测试网络拓扑:
场景:千兆以太网络,链式拓扑, 5 跳。
§ 测量设备: 高分辨率的示波器。
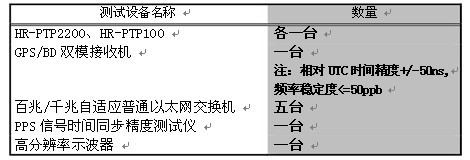
§ 测试设备: HR-PTP2200 设备(0722 版本)做主时钟,HR-PTP100设备作为从时钟,5 个千兆思科交换机,示波器。
§ 配置参数:组播,E2E,一步,UDP,sync 为-3,announce 为 0,delay_req为-3。
§ 测试内容:HR-PTP2200 做主(接 GPS 天线一段时间后拔掉),HR-PTP100做从,过 5 跳交换机,不加流量,使用示波器查看主从 PPS 偏差。
§ 测试结果统计方法: 系统稳定后观察 1 个小时。
测试结果
五跳,链式拓扑,以太网络中主从时钟同步精度测试示意图:
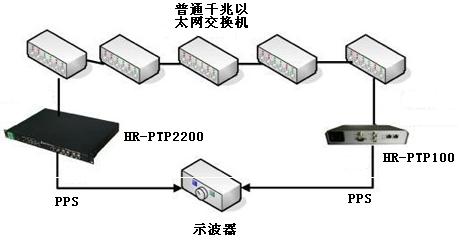
测试结果:测试时间 1 小时,主从对时偏差为(-240,50)ns;
审核编辑 黄宇
-
京准电钟:GPS时钟服务器(NTP授时服务器)资料详细介绍书2024-06-18 1682
-
京准电子 GPS网络时间服务器为工业4.0数据保驾护航2024-06-07 1385
-
安徽京准-时间源服务器(NTP网络时钟源)在医疗中的重要性2024-06-11 1172
-
安徽京准 | PLC时钟同步(NTP网络时间服务器)的重要性2024-06-19 1518
-
京准电钟:NTP网络时钟服务器应用石油化工行业2024-10-24 1469
-
京准电钟解读:PTP时钟同步系统及应用是什么?2024-10-31 1861
-
京准电钟:NTP网络授时服务器在分布式网络内的应用2024-11-27 1079
-
京准电钟:NTP北斗时钟服务器助力生物制药2025-02-18 1004
-
京准电钟守护时钟防线:北斗网络授时服务器构建安全堡垒2025-03-24 1071
-
安徽京准GPS北斗时钟服务器的应用及分析2025-03-26 1200
-
数据堡垒:京准1588PTP主从时钟系统构建精准世界2025-10-29 791
-
安徽京准:PTP时钟同步精准赋能AI机器人2026-01-16 690
-
安徽京准:1588PTP授时服务器助力工业信息化建设2026-01-26 500
-
北斗卫星时钟服务器:安徽京准国产化授时技术方案2026-02-04 538
-
NTP网络校时服务器:安徽京准铸就智慧城市精准数据方案2026-02-26 496
全部0条评论

快来发表一下你的评论吧 !
