

EMB系统功能安全分析(1)
描述
以下文章来源于汽车电子研究院,作者ZZ先生志
一、简介
汽车领域正迎来电动和智能的新时代,将线控技术应用于车辆控制成为新的趋势。其中,线控制动系统(brake-by-wire)是目前智能车辆领域研究的热点之一。电子机械制动(electronic mechanical brake,EMB)系统应用电子控制完全取代了液压管路,可以实现制动系统的完全解耦,结构更加精简,同时提高了反应速度和执行效率,便于底盘域控及智能驾驶技术发展。但是由于其取消了原有的液压备份冗余,所以对系统的可靠性提出了更高的要求,安全成为影响 EMB发展的关键因素,车辆软硬件功能安全的要求也越来越高 。国际标准化组织(International Organizationfor Standardization, ISO)于 2011 年发布了 ISO 26262标准。
开发合理的线控制动技术控制策略,降低响应时间、提高响应精度的同时,保证功能安全,提高系统可靠性成为智能汽车发展的关键技术之一。根据 ISO 26262 标准中的“ V 模型”流程对 EMB 系统进行功能安全分析,分析故障发生的原因和逻辑关系,以掌握线控制动安全控制的关键;进行功能安全概念(functional safety concept,FSC)设计,建立三路并行的冗余优化方案,确定符合安全目标的 EMB 系统架构,并基于该系统架构设计失效运行策略;最后,搭建联合仿真模型进行故障注入实验,验证安全分析的合理性及安全机制对系统安全性的影响。
二、EMB系统概述
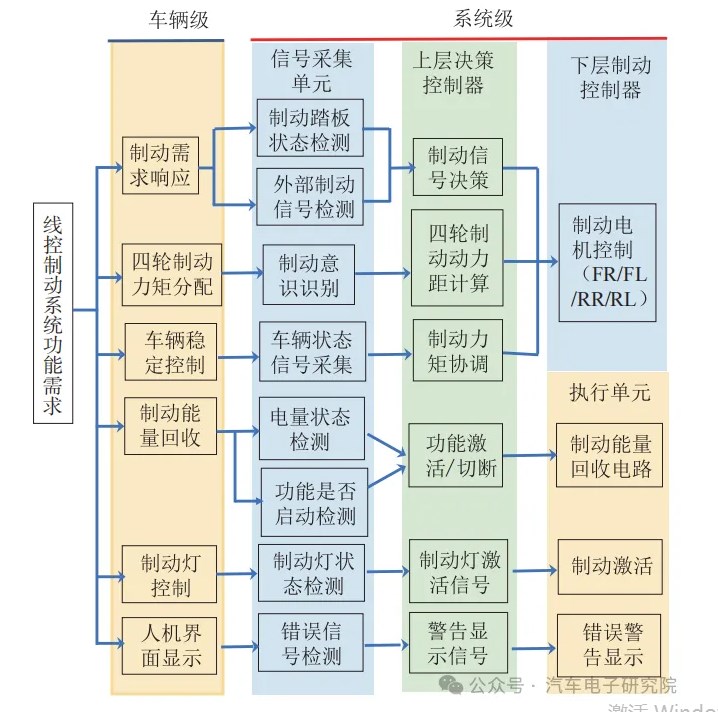
电子机械制动(EMB)系统由电子踏板单元、传感器阵列、控制单元、执行单元及电源系统 5 大部分组成。
电子踏板单元可以采集驾驶员制动意图并模拟制动反馈力矩;
传感器阵列包括各类传感器,用来采集车辆状态信息;
控制单元采用分层控制架构,由1 个上层决策控制器(brake control unit,BCU)和 4 个轮边控制器(wheel acuator control unit,WACU)组成,其中 BCU进行信息处理及四轮制动力矩计算等决策,WACU 接受上层控制器的指令,可实现轮边电机独立控制;
执行单元包括制动执行机构、制动信号灯及人机界面;
电源系统为 EMB 系统供电。
此外,以上模块通过 CAN 网络进行信息交换。基于该基本架构,进行系统安全分析。

EMB 系统最基本的功能需求为驾驶员制动需求响应,此外,需引入智能车辆带来的新需求,如车辆主动制动及稳定性控制;同时,还需实现相关警示信号和制动灯的激活功能。考虑系统为分层控制架构,可将总需求进行逐层分配,综合可得 EMB 系统车辆级和系统级的功能需求如图 所示。
三、EMB系统功能安全等级评估
ISO 26262 标准中最重要的环节之一就是危险分析 和 风 险 评 估(hazard analysis and risk assessment,HARA),进而确定汽车完整性等级和安全目标。根据 HARA 分析方法论,可分为 4 个步骤:场景分析、故障模式分析、危险事件分析及相关汽车安全完整性等级评估、安全目标确定。
(1)场景分析
场景分析过程中,需要考虑道路类型、路面条件、环境因素及驾驶行为状态,并结合实际的道路交通状况等因素以推导出合理的功能安全要求。为保证分析的广泛性,本文场景分析包含车辆常见行驶场景及极端场景,车辆高、中、低速行驶场景以及行驶中遇到不同周边环境的多种情况,具体如下说明。
道路类型:高速公路、城市道路、盘山公路、交通路口,停车场;
车速:高速(> 90 km/h)、中速(30 ~ 90 km/h)、低速(< 30 km/h);
周边环境类型:其他车辆、行人、障碍物;
天气:晴朗、雨天、冰雪天气、夜晚。
(2)故障模式
根据标准有 6 大类常见故障失效模式,分别为:有需求无输出、无需求有输出、输出大于需求、输出小于需求、输出与需求相反、输出异常。结合 EMB 系统功能需求,可得系统主要故障类型有:制动失效、突发制动、制动疲软、四轮制动分配异常、制动灯或人机界面显示异常。
(3)危险事件分析及系统 ASIL 等级评估
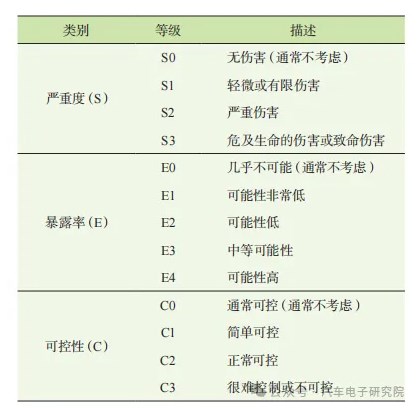
汽车安全完整性等级(automotive safety integration level,ASIL)等级是将故障发生后产生的风险进行了评估和量化,风险越大对应安全要求的级别越高,ASIL等级由低到高分为 QM、A、B、C、D。具体 ASIL 等级的确定取决于 3 个基本要素:严重度 (S)、暴露率 (E) 和可控性 (C)。
上述要素可分为多个不同等级,具体划分标准。
(4)EMB 系统功能安全目标
当安全目标需高于根据具体驾驶环境所确定的 S、E、C 评估的危险险事件的 ASIL 等级时,系统的安全目标应取风险中最高等级。根据 HARA 分析结果可以得到 13 条安全目标,如表中所示。
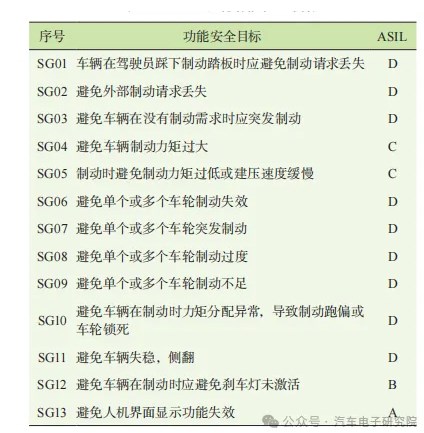
见表 1
-
长城汽车EMB产品通过功能安全ASIL D等级认证2025-03-06 1695
-
华北工控发布高性能EPIC单板EMB-41482025-01-21 1730
-
EMB系统功能安全分析(2)2024-10-16 2786
-
EMB2F-THRU-EMB8F规格书2021-11-25 897
-
EMB2F-THRU-EMB8F-MBF规格书2021-11-24 809
-
EMB1061 EMB1061EMB1061是采用ST BlueNRG-132 BLE模块2020-05-20 806
-
EMB1499Q EMB1499Q 双向电流 DC/DC 控制器2018-11-02 805
-
EMB380-S2 开发板技术数据2015-01-20 6504
-
大唐EMB5116产品说明书2011-03-01 2236
-
EPIC主板EMB-4890特性分析2010-08-19 1887
-
车辆EMB制动系统的发展历程简述2010-03-11 7540
-
系统功能安全测试技术研究2009-01-06 830
全部0条评论

快来发表一下你的评论吧 !
