

EMB系统功能安全分析(3)
描述
以下文章来源于汽车电子研究院,作者ZZ先生志
一、EMB失效控制
EMB 系统失效判断基于前面所述三路并行的安全机制,可实时检测系统运行状态,探测系统故障,又由于该系统为四轮独立制动,结合安全机制可引入四轮制动故障因子 λi来表征四轮故障状态,进行失效判断。故障因子的规则如式所示。
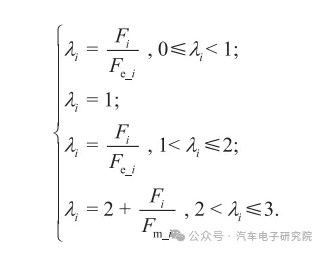
其中:i 表示不同车轮,即 FL、FR、RL、RR,它们分别表示左前轮、右前轮、左后轮、右后轮;Fi 表示实际制动力;Fe-i 表示期望制动力;Fm-i 表示最大制动力。当车轮可以正常制动时 λi = 1,如果有导致制动力降低或制动过度的故障发生,λi 将根据实际制动力与期望制动力的比值确定,此时 λi 范围为 0 ≤ λi < 1 及 1 <λi ≤ 2。λi 的值对应车轮丢失制动力的比例,如 λi = 0.8 时,意味着丢失了20% 的制动力。同理,当发生突发制动时,λi 的值为 2 加上多出的制动力与最大制动力之比,λi 范围为 2 < λi ≤ 3。如当 λi = 2.2 时表示发生了大小为当前最大制动力的 20% 的非预期制动。
二、EMB失效控制策略
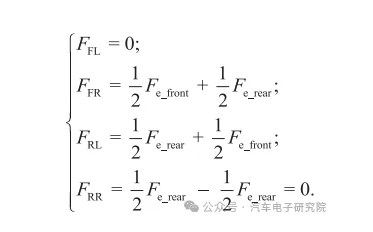
在前文的功能安全分析中,已得出不同的故障模式及对应 ASIL 等级,由于较常见的故障为单轮制动力丢失,且 EMB 系统为四轮独立制动架构,于是提出利用其余三轮进行整车制动力重构,以满足车辆制动需求和稳定性控制。由于在制动过程中会发生载荷转移,所以前轮发生制动异常时会导致更为严重的后果,下文以左前轮制动力完全丢失为例(λFL = 0)设计失效控制策略。制动强度为 z 时,初始制动力为:

其中:m 为车辆质量;Fe-front 为车辆预期前轴总制动力;Fe-rear 为车辆预期后轴总制动力。当左前轮发生制动力丢失时,为满足车辆制动强度需求和稳定性需求,基于四轮制动力平衡对其余三轮进行制动力重构,具体分配规则为:
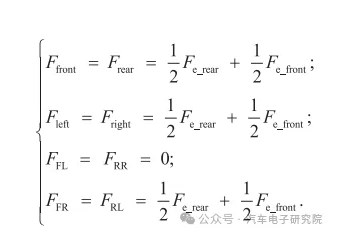
根据式分配规则,可实现在总制动力不变的同时,满足前后轴、左右侧和对角线车轮的制动力均相等,即
在满足制动强度的基础上,路面峰值附着系数限制了车辆可实现的最大减速度 [16],因此车轮的最大制动力需满足约束条件:
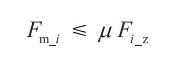
其中:Fm-i 为车轮制动力极限值,μ 为地面附着系数,Fi-z为车轮垂向载荷。根据以上分配规则及约束条件,即可求得余下三轮的重构制动力,右前轮、左后轮及右后轮发生失效后的 EMB 系统失效策略同左前轮失效。此时满足总制动力需求及制动力平衡需求,可避免车辆制动能力降低和四轮制动力不平衡带来的车辆失稳,实际控制效果将继续验证。
-
长城汽车EMB产品通过功能安全ASIL D等级认证2025-03-06 1695
-
华北工控发布高性能EPIC单板EMB-41482025-01-21 1730
-
EMB系统功能安全分析(1)2024-10-16 3788
-
EMB2F-THRU-EMB8F规格书2021-11-25 897
-
EMB2F-THRU-EMB8F-MBF规格书2021-11-24 809
-
EMB1061 EMB1061EMB1061是采用ST BlueNRG-132 BLE模块2020-05-20 806
-
EMB1499Q EMB1499Q 双向电流 DC/DC 控制器2018-11-02 805
-
EMB1412 EMB1412 MOSFET 栅极驱动器2018-10-16 558
-
EMB380-S2 开发板技术数据2015-01-20 6504
-
大唐EMB5116产品说明书2011-03-01 2236
-
车辆EMB制动系统的发展历程简述2010-03-11 7540
-
系统功能安全测试技术研究2009-01-06 830
全部0条评论

快来发表一下你的评论吧 !
