

采用双轴加速度传感器的斜度测量系统设计
MEMS/传感技术
描述
一、引言
微机械惯性器件是微机电系统重要的研究内容,微惯性器件包括微陀螺和微加速度传感器。采用微机电技术制造的微加速度传感器在寿命、可靠性、成本、体积和重量等方面都要大大优于常规的加速度传感器,使得其无论在民用领域,还是在军用领域都有着广泛的应用。本文就是采用美国ADI公司出品的低功耗,功能完善的双轴加速度传感器。ADXL202E作为斜度测量的传感器,给出了由ADXL202E与单片机AT89C52组成的斜度测量系统设计实例。
二、ADXL202E简介
1、ADXL202E特点
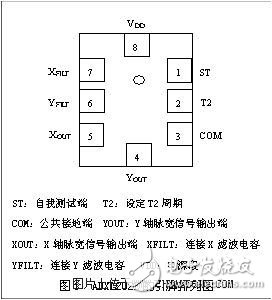
ADXL202E是一种低成本、低功耗、功能完善的、集双轴加速度传感器于一体的单块集成电路。它既可测量动态加速度, 又可测量静态加速度,其测量范围为±2g。它既具有模拟信号输出,又有脉宽占空比输出。ADXL202E最大可承受1000g的剧烈冲击。图1为ADXL202E的引脚排列图和引脚功能。
2、测量原理
ADXL202E是基于单块集成电路的完善的双轴加速度测量系统。它是一个以多晶硅为表面的微电机传感器和信号控制环路来执行操作的开环加速测量结构。对每根轴而言, 输出环路将模拟信号转换为脉宽占空比的数字信号。这些数字信号直接与微处理器接口。ADXL202E可测量正负加速度,其最大测量范围为±2g。ADXL202E也可测量静态加速度,可用作斜度测量。传感器采用在硅片上经表面微加工的多晶硅结构,用多晶硅的弹性元件支撑它并提供平衡加速度所需的阻力。结构偏转是通过由独立的固定极板和附在移动物体上的中央极板组成的可变电容来测量的。固定极板通过方波的每p个相位控制。加速度计受到加速度力后改变了可变电容的平衡,使输出方波的振幅与加速度成正比。而相位解调技术用来提取信息判断加速方向。解调器的输出通过32kW的固定电阻输出到脉宽占空比解调器。这时,允许用户改变滤波电容的大小来设置输出信号的带宽。这种滤波提高了测量的精度,并有效地防止频率混叠。经过低通滤波后,模拟信号由DCM转换为脉宽占空比信号。通过一个电阻RSET将T2设定在0.5ms~10ms范围内。在0g加速度时使输出占空比为 50%。加速度可由一计数/计时器或低功耗的微控制器通过测量T1,T2来测得。
模拟输出信号可通过以下两种方法获得:一种从XFILT和YFILT 管脚得到;一种是通过RC滤波器对脉冲信号滤波后得到的dc 值推算。
三、斜度测量电路设计
1、滤波器设计
ADXL202E可以测量静态加速度,也可以测量动态加速度,其最大测量带宽为5000Hz。带宽(W)是由低通滤波器的参数确定的。RFILT(滤波器阻值)可在额定值32kW的±25%范围内变动,相应地带宽也随之变化。在本设计中RFILT为32kW。因此,加速度信号的带宽则由XFILT和YFILT 引脚外接电容设定。电容必须安装在紧靠引脚处,,用以混叠和抑制噪声。3dB带宽计算公式如下:
F(-3dB)= 1/2P[32kW×C(X, Y)]
即:F(-3dB)= 5mF/ C(X, Y) (1)
可见电容选取越小,信号带宽越宽,分辨率越高。C(X,Y)为滤波器的电容值,主要确定带宽C(X,Y)。另外,在任何情况下,C(X,Y)的最小电容值为1000pF 。在本设计中选定C(X,Y)为100nF,即加速度模拟信号带宽为50Hz。
ADXL202E的噪声特点是在所有频率下都是同样大的白色高斯噪声,以mg/  为单位,即噪声与加速度信号带宽平方根成正比。
为单位,即噪声与加速度信号带宽平方根成正比。
ADXL202E的典型噪声值可用以下公式计算:
Noise(rms)=(200mg/ )×  (2)
(2)
由于本设计中加速度信号带宽为50Hz ,所以噪声均方值为1.79mg。
故ADXL202E的XFILT和YFILT引脚接0.1mF电容使得模拟输出带宽为50Hz、输出附带噪声为1.79mg。同时,ADXL202E的XFILT和YFILT引脚产生与斜度相对应的模拟信号。
ADXL202E感应的重力分量的变化在+1g和-1g之间。,在0g时有:
OFFSET(偏置带)=2.5V±0.4V (5)
Sensitivity(灵敏度)=167 mV/g ±17 % (6)
2、DCM 的周期设定:
利用RSET设定DCM 的周期:有两个通道的DCM的周期是通过电阻RSET来设定。计算公式为:T2=RSET(W)/125MW。器件可在周期0.5ms~10ms范围内运行。在本设计中选定RSET为330kW,即DCM周期为2.64ms。 RSET 应安装在靠近T2引脚处,以使分布电容最小。
3、模拟信号处理电路
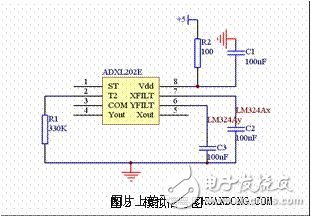
由于ADXL202E内部32kW电阻的影响,使得XFILT和YFILT的模拟输出驱动力不足,所以需要在XFILT和YFILT之后分别加上一个通过LM324运算放大器构成的跟随器,用来增加驱动。再通过上面选定的元件参数可以得到ADXL202E的模拟信号图,如图2所示。
4、参数标定
在斜度测量时,重力系统是最稳定、最精确、应用最广泛的参照系。使装置的方向与水平面平行便可得到0g时的校准值。
由于器件参数的差异, 芯片的基本参数、同一器件两个不同轴向的参数也有差异。因此,当要求测量精度较高时,仍使用参数典型值就会引起误差。
要提高测量的精度,就需要在测量前对相关参数进行认真校准。使用重力矢量做为参考的话,则要将测量范围设定在1g和-1g之间。当X(Y)轴指向1g时,传感器的输出为最大值,记作A;当X(Y)轴指向-1g时,传感器的输出为最小值,记作B。则计算灵敏度Sensitivity公式为:
Sensitivity
 (7)
(7)
四、单片机系统设计设计
单片机系统设计分为下位机和上位机两个部分。下位机采用常用的AT89C52作为处理器,模数转换采用具有10位精度的TLC1543作为A/D转换器件,采用X5045作为看门狗芯片,稳压源采用LM336。上位机采用Visual Basic 6.0进行设计,主要包括参数标定,实时监测界面设计两个部分。
1、A/D转换电路设计
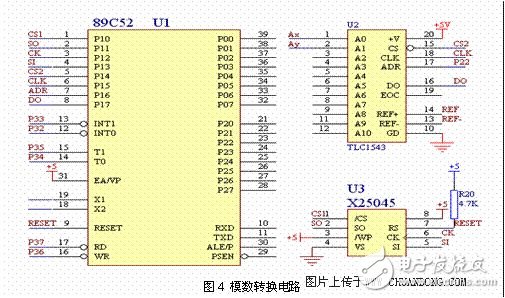
ADXL202E感应的重力分量的变化在+1g~-1g之间,而传感器ADXL202E的供电电压为+5V,所以输出模拟量的线性变化在+2.1~+2.9V之间。为了不损失A/D转换芯片TLC1543的采样精度,在TLC1543的REF+端接+3V,REF-端接+2V。为了得到稳压电源,需要采用LM336芯片,从而得到稳定电压-5V,再通过运算放大器LM324组成负反馈放大电路,最终得到参考源所需要的+3V和+2V。其电路如图4所示。
2、看门狗电路设计
系统采用串行X5045芯片作为看门狗芯片。该芯片上电时,当电源电压超过4.5V,经过200mS的稳定时间后RESET由高电平变为低电平。掉电时,电源电压低于4.5V时,RESET信号立刻变为高电平并一直保持到电源恢复到稳定为止。另外,EEPROM芯片内部还具有大小为4096位EEPROM,可以作为数据的掉电保护存储空间。
五、上位机监测界面设计
上位机采用Visual Basic6.0进行设计。主要完成监测界面的设计,对串口数据的正确接收,包括对ADXL202E参数标定,监测曲线显示等必要的功能。
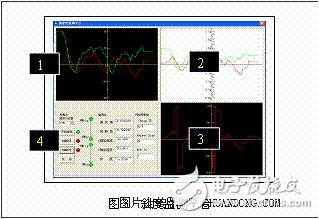
图3为设计后的监测平台,从图3中1处可以观测到俯仰角和旋转角随时间变化的曲线;从图3中3处可以观测传感器节点的斜度随时间在±180°之间变化;从图3中2处可以观测到单位为mg的加速度变化,通过这个监测界面还可以实时的观测传感器节点由于振动等原因引起的输出信号振荡。从图3中4处为监测平台的控制面板,通过控制面板可以对传感器参数进行标定,可以观测传感器实时输出的数据。
对于测得的静态加速度,需要将其转化成相应的工程量,在这里主要分为两种情况:
(1)双轴加速度传感器的X轴和Y轴测得的加速度值Ax和Ay可以通过如下公式转换为倾斜度:
俯仰角
 (8)
(8)
旋转角
 (9)
(9)
(2)因双轴加速度传感器的X轴和Y轴方向互为垂直,所以也可利用来测量满周为360°的斜度。当其中一个传感器的输出值为最大时,另一个传感器的输出值为最小。
六、结束语
应用上述的设计方法及其要点,通过反复调试实现了对斜度(静态加速度)的测量,达到了预期目的。实践证明ADXL202E非常适合于频率变化较为缓慢、加速度不太大的测量。在充分考虑各种因素的基础上,合理设置有关参数,就可以得到很好的精度。
-
加速度传感器都有哪些应用2023-02-02 6147
-
三轴加速度传感器原理_三轴加速度传感器应用2019-10-17 20500
-
具有数字信号输出的双轴加速度传感器ADXL2022018-11-19 2387
-
加速度传感器工作原理和分类2018-11-07 3462
-
MEMS技术的热对流式双轴加速度传感器2018-10-31 2453
-
三轴加速度传感器应用详解2016-11-29 14135
-
细数加速度传感器的7大应用场景2016-11-24 5877
-
加速度传感器的应用详解2016-11-15 2423
-
MEMS传感器应用实例:使用双轴加速度计进行倾斜测量2012-12-12 16408
-
基于无线传感器网络的斜度测量系统设计2009-11-26 692
全部0条评论

快来发表一下你的评论吧 !
