

STM32调试SP3485技术总结
控制/MCU
描述
1、本文使用的STM32芯片是STM32F103RB,使用的资源是片内的USART1。
2、下面是我的电路连接图:
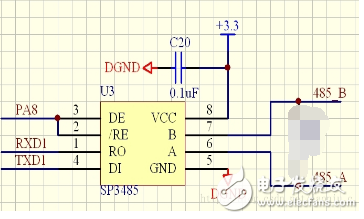
注:电路可以稍做修改更好,在B和A分别接下拉电阻到地和上拉电阻到5v,阻值选择为10K即可,这是为了在没有进行数据传输时保证两条数据线的状态为确定值。
做一下简单的说明:
(1)PA8是sp3485的发送/接收使能端,sp3485只能支持半双工的通信,所以这个引脚就是来控制这个芯片到底是收数据还是发数据的。
(2)在有些电路连接中,sp3485的A和B端会一个被连接一个上拉电阻到3.3V,另一个会连接一个下拉电阻到GND,这样做的目的是当本sp3485不参与通信时不会影响网络的稳定性。
3、本次调试方式
PC机——USB转232转换头——RS232/RS485双向转换头——sp3485——STM32,因为是第一次调试sp3485芯片,所以当然没有太大意,先拿电脑调试,调试通了再看板子和板子之间的通信了。
4、本次试验的代码:
main函数:
int main(void)
{
/* Configure the system clocks */
RCC_Configuration();
/* NVIC Configuration */
NVIC_Configuration();
/* Configure the GPIOs */
GPIO_Configuration();
/* Configure the USART1 */
USART_Configuration();
GPIO_SetBits(GPIOA, GPIO_Pin_8); //PA8是sp3485发送/接收控制端,这里先设置为发送(实现的功能就是上电之后STM32先向PC发送一个4和一个3)
delay_ms(2);//稍稍延时一下,原因去查看sp3485的手册吧
USART_ClearFlag(USART1,USART_FLAG_TC);//这一句很关键,如果没有这一句这个4会发送不成功或者发送错误的,
//其实手册上讲了使能发送位后会发送一个无用的帧,所以那个帧发送完了这个
//发送完成的标志位USART_FLAG_TC当然也被置位了。
USART_SendData(USART1, 4);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);//上面清除了发送完成标志位,那么这里就可以等待发送完成标志位被置位来判断这一帧是否发完了
USART_SendData(USART1, 3);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
while(1)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_8);//现在把PA8清零,试试接收PC机发送过来的数据
delay_ms(2);//稍稍延时一下,原因去查看sp3485的手册吧
USART_ClearFlag(USART1,USART_FLAG_RXNE);//既然上面开始发送之前都将发送完成标志位清零,这里也将接收完成标志位清下零,就当是一个好习惯吧
while(1)
{
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==SET)//判断是否有一帧数据接收完成
{
buf[j++] = USART_ReceiveData(USART1); //接收完成的话就直接放到缓存区域里
}
if(10 == j)//接收完成10个之后就跳出去,不再接收了,有个意思就OK了
break;
}
j = 0;//清零一下j变量,使得实验可以反复接收PC发过来的10个数据
GPIO_SetBits(GPIOA, GPIO_Pin_8);//将sp3485设置为发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
delay_ms(2);//稍稍延时一下,原因去查看sp3485的手册吧
for(i = 0; i 《 10; i++)
{
USART_SendData(USART1, buf[i]);//将数据依次发送出去
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
}}}
注:在用STM32的串口做485通信的时候,发送数据的时候,检测到最后一个数据发送后的标志位已经置位,但是还不能立即失能485芯片的发送引脚,因为虽然标志位已经置位,485芯片的数据还没有完全发送出去,这个时候需要ms级别的延时,一般2个毫秒左右基本就没有问题了。
RCC设置函数:
void RCC_Configuration(void)
{
/* RCC system reset(for debug purpose) */
RCC_DeInit();
/* Enable HSE */
RCC_HSEConfig(RCC_HSE_ON);
/* Wait till HSE is ready */
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if(HSEStartUpStatus == SUCCESS)
{
/* HCLK = SYSCLK */
RCC_HCLKConfig(RCC_SYSCLK_Div1);
/* PCLK2 = HCLK */
RCC_PCLK2Config(RCC_HCLK_Div1);
/* PCLK1 = HCLK/2 */
RCC_PCLK1Config(RCC_HCLK_Div2);
/* Flash 2 wait state */
FLASH_SetLatency(FLASH_Latency_2);
/* Enable Prefetch Buffer */
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
/* PLLCLK = 8MHz * 9 = 72 MHz */
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
/* Enable PLL */
RCC_PLLCmd(ENABLE);
/* Wait till PLL is ready */
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
}
/* Select PLL as system clock source */
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
/* Wait till PLL is used as system clock source */
while(RCC_GetSYSCLKSource() != 0x08)
{
}}
/* Enable USART1 and GPIOA clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC, ENABLE);
}
GPIO设置函数:
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure PC. as Output push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//GPIO_Mode_Out_PP = 0x10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//GPIO_Mode_Out_PP = 0x10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
USART设置函数:
void USART_Configuration(void)
{
USART_InitTypeDef USART_InitStructure;
USART_ClockInitTypeDef USART_ClockInitStructure;
USART_ClockInitStructure.USART_Clock = USART_Clock_Disable;
USART_ClockInitStructure.USART_CPOL = USART_CPOL_Low;
USART_ClockInitStructure.USART_CPHA = USART_CPHA_2Edge;
USART_ClockInitStructure.USART_LastBit = USART_LastBit_Disable;
/* Configure the USART1 synchronous paramters */
USART_ClockInit(USART1, &USART_ClockInitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* Configure USART1 basic and asynchronous paramters */
USART_Init(USART1, &USART_InitStructure);
/* Enable USART1 */
USART_Cmd(USART1, ENABLE);
}
NVIC设置函数:
void NVIC_Configuration(void)
{
#ifdef VECT_TAB_RAM
/* Set the Vector Table base location at 0x20000000 */
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else /* VECT_TAB_FLASH */
/* Set the Vector Table base location at 0x08000000 */
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
}
-
SP3481/SP3485收发器英文手册2022-09-29 921
-
sp3485电路设计2021-11-05 3049
-
STM32调试485(sp3485)技术总结资料下载2021-04-07 1919
-
SP3481和SP3485低功耗半双工RS485收发器的数据手册免费下载2021-03-16 2175
-
关于SP3485芯片供电电压问题2019-09-10 14699
-
SP3481和SP3485半双工收发器的数据手册免费下载2019-07-31 1920
-
调试sp3485芯片经验总结2018-06-22 26317
-
sp3485推荐电路(几款收发芯片sp3485电路)2018-01-17 264119
-
sp3485引脚图及功能2017-10-27 38704
-
SP3485的RO接口输出电平不稳定2013-12-30 4706
-
SP3485的功能是什么?2012-04-12 10119
-
SP3481/SP3485中文资料,pdf (3.3V低功耗2010-02-23 3196
全部0条评论

快来发表一下你的评论吧 !
